Изобретение относится к области электротехники и может быть использовано в системах автоматического регулирования возбуждения синхронных двигателей насосных станций.
Известен способ управлением током возбуждения синхронного электродвигателя в послеаварийных режимах энергосистемы [Патент RU 2658741 С1, Заявка 2017118298, 2017.05.25, опубл. 2018.06.22], который заключается в том, что в послеаварийных режимах энергосистемы измеряют величину cosϕ двигателя и текущее значение его угла нагрузки, поддерживают значение cosϕ на уровне 1,0 путем изменения в соответствующую сторону значения уставки контура регулирования тока возбуждения по отклонению напряжения статорной цепи, осуществляемого по пропорционально-дифференциальному закону, задают минимальное и максимальное значения рабочего диапазона угла нагрузки двигателя, при выходе величины угла из заданного диапазона прекращают воздействие на ток возбуждения по отклонению напряжения и ведут управление током возбуждения по величине отклонения угла нагрузки от заданного номинального значения, пока величина отклонения не изменит знак, после чего вновь начинают воздействовать на ток возбуждения по отклонению напряжения статорной цепи.
Недостатком данного подхода является то, что для ограничения максимально допустимой величины тока ротора осуществляется непрерывный контроль температуры его обмотки путем косвенного измерения активного сопротивления обмотки. Ограничение имеет фиксированную величину по превышению тока возбуждения. При этом время воздействия максимальной величины тока возбуждения не учитывается, и не гарантируется ограничение на необходимом уровне полученного ротором теплового импульса. Колебания температуры обмотки ротора приводят к изменениям величины ее омического сопротивления, что еще более увеличивает неопределенность теплового импульса ротора при данной величине тока возбуждения.
Известен способ регулирования возбуждения синхронных двигателей, реализованный в устройстве [Абрамович Б.Н., Круглый А.А. Возбуждение, регулирование и устойчивость синхронных двигателей. - Л.: Энергоатомиздат: Ленингр. отд-ние, 1983. - с. 104-107], содержащем измерители напряжения и тока статора синхронного двигателя, измеритель угла ϕ, измеритель тока ротора, усилитель и фазоимпульсное устройство.
К недостаткам этого способа регулирования возбуждения синхронного двигателя можно отнести недостаточно эффективное демпфирование колебаний, возникающих при изменениях нагрузки и напряжения сети, а также недостаточную статическую устойчивость двигателя.
Наиболее близким к заявленному способу по технической сущности и достигаемому результату и выбранным в качестве прототипа является способ, описанный в [Патент CN 109639207 А, Заявка 201811652624.6, 2018.12.29, опубл. 2019.04.16], в котором модель нечеткого регулятора моделируют в системе Matlab, выход которого соединяют со входом ПИД-регулятора, осуществляющим нечеткое управление с целью минимизации потерь энергии в электрической сети.
Недостатком способа является выбранный параметр регулирования в виде отклонения скорости вращения ротора синхронного двигателя, который в достаточной степени не может обеспечивать минимизацию потерь энергии, не управляя уровнем реактивной мощности в узле нагрузки.
Задачей предлагаемого изобретения является поддержание максимального значения cosϕ узла нагрузки с целью минимизации потерь энергии в сети.
Поставленная задача достигается тем, что в систему регулирования возбуждения синхронного двигателя, представляющую из себя контроллер на базе нечеткой логики, вносят сигналы стабилизации по отклонению cosϕ и реактивной мощности в узле нагрузки.
При значительной мощности двигателя и недостатке реактивной мощности в системе может возникать потеря устойчивости работы не только самого двигателя, но и всего узла нагрузки. Поэтому для получения высокой экономичности работы синхронного двигателя и хороших технико-экономических показателей питающей сети при изменяющейся нагрузке и возможных колебаниях питающего напряжения необходимо применять автоматическое регулирование возбуждения (АРВ). АРВ изменяет величину отдаваемой двигателем реактивной мощности по определенному закону в зависимости от величины и характера нагрузки, а также от режима питающей сети [Лищенко А.И. Синхронные двигатели с автоматическим регулированием возбуждения // Изд-во «Техшка», Киев, 1969. - 192 с.].
Крупные насосные станции, имеющие в своем составе синхронные двигатели, мощности которых достигают нескольких десятков мегаватт, могут быть использованы в качестве компенсаторов реактивной мощности нагрузочных узлов для обеспечения минимизации потерь энергии в сетях.
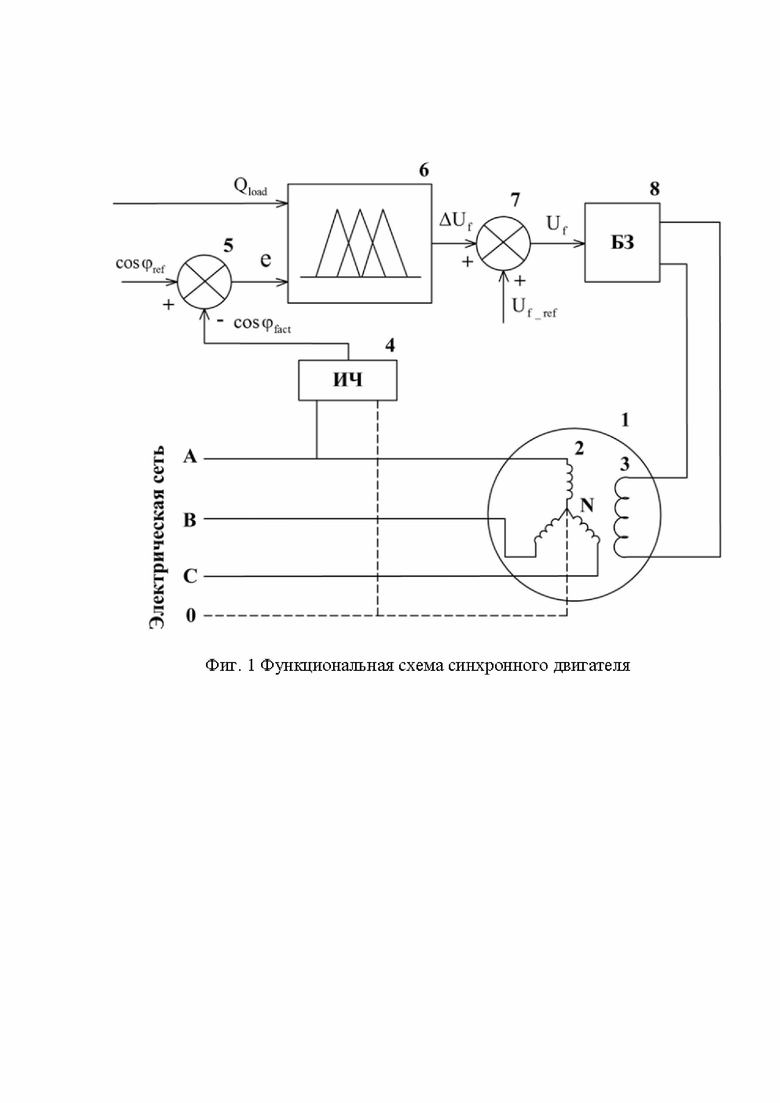
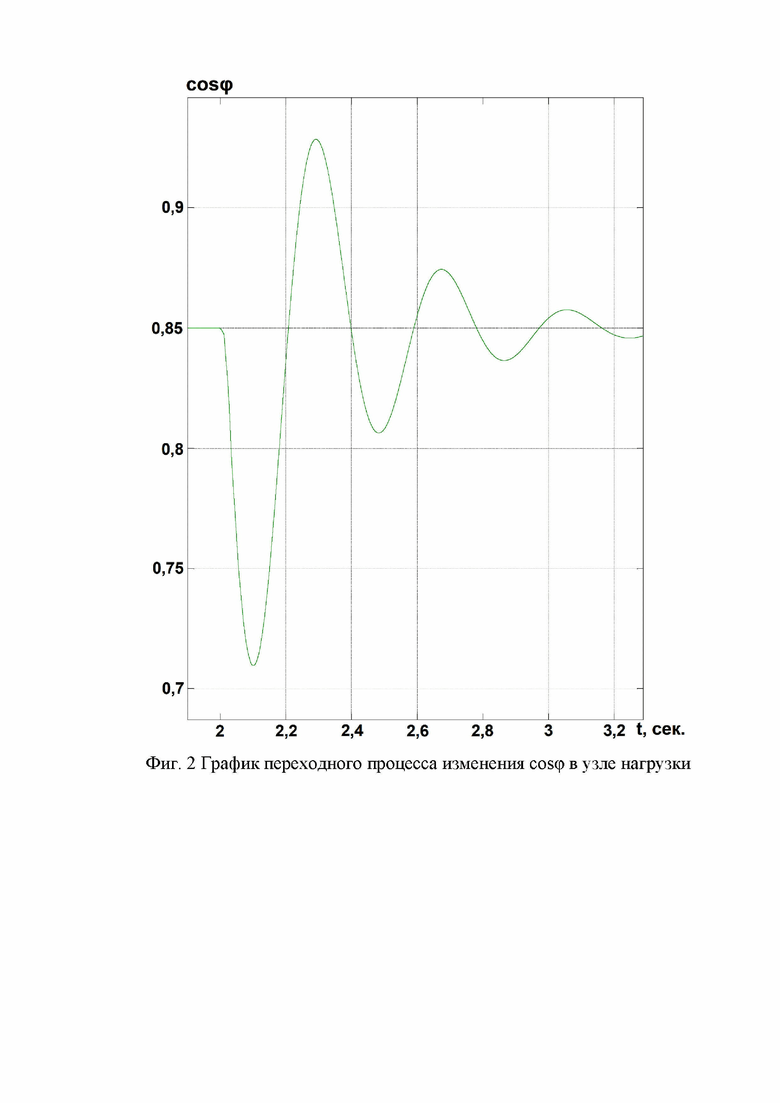
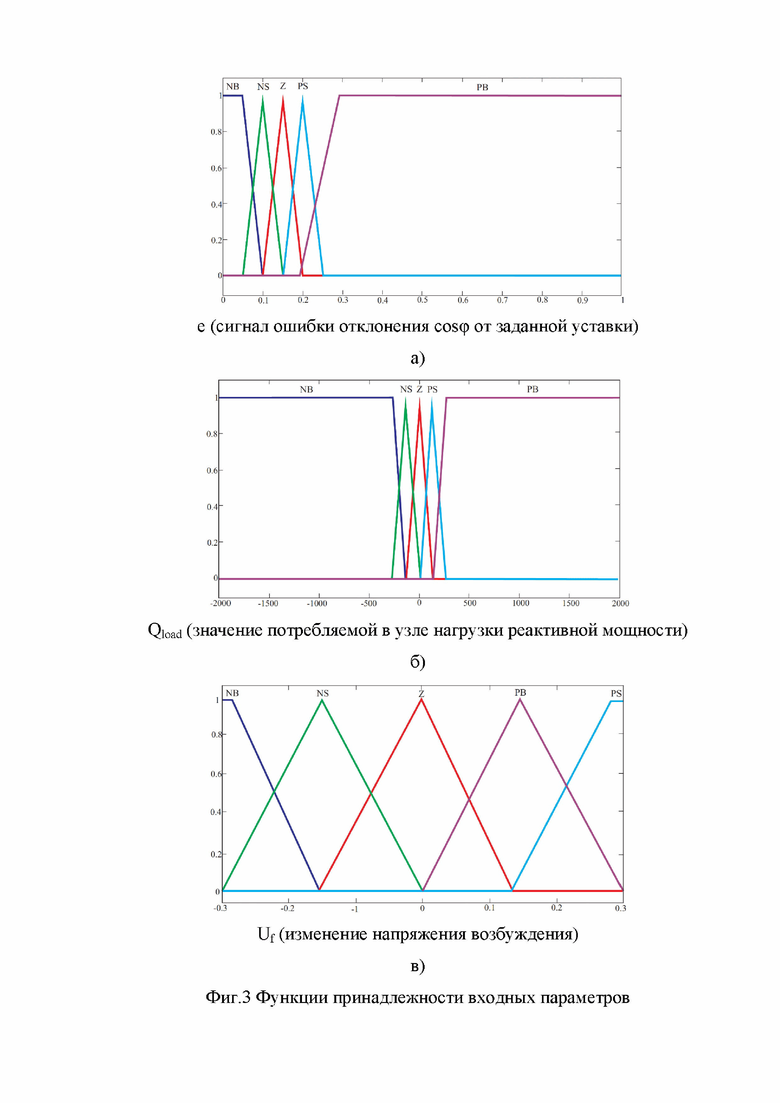
Сущность изобретения поясняется фигурами, где на фиг.1 приведена функциональная схема синхронного двигателя, питаемого от сети, и реализующее предлагаемый способ управления возбуждением; на фиг.2 показаны переходные процессы изменения cosϕ при внезапном подключении индуктивной нагрузки; на фиг.3 показаны функции принадлежности регулятора на основе нечеткой логики.
Схема управления возбуждением синхронного двигателя (фиг.1) содержит синхронный двигатель 1, подключенный к трехфазной электрической сети, измерительную часть 4 (ИЧ), подключенную к одному из фазных выводов обмотки статора 2 и нейтралью N синхронного двигателя 1, при этом выходы измерительной части 4 (ИЧ) являются входами сумматора 5, который в свою очередь подключен к контроллеру нечеткой логики 6, выход которого соединен к сумматору 7, выход которого соединен к блоку защиты 8 (БЗ), подключенного к обмотке возбуждения 3 синхронного двигателя 1.
Способ управления возбуждением синхронного двигателя реализуется следующим образом.
Измерительная часть 4 (ИЧ), подключенная к выводу обмотки статора 2 и нейтрали N синхронного двигателя 1, предназначена для измерения и преобразования параметра регулирования - cosϕ. Сигнал измеренного cosϕfact подается на вход сумматора 5, в котором он сравнивается с заданной уставкой cosϕref, и формируется сигнал ошибки e=cosϕref-cosϕfact, который вместе с сигналом заранее измеренной величины потребляемой в узле реактивной мощности Qload подается на вход контроллера нечеткой логики 6. Контроллер нечеткой логики 6 является нелинейной системой управления, которая использует точные входные переменные в виде сигнала ошибки е и потребляемой реактивной мощности в узле Qload и в соответствии с базой правил формирует управляющую переменную в виде сигнала изменения напряжения возбуждения ΔUf. Выходной сигнал ΔUf с контроллера нечеткой логики 6 поступает на вход сумматора 7, где он складывается с уставкой напряжения возбуждения ΔUf_ref и формирует выходной сигнал Uf, поступающий на вход блока защиты 8 (БЗ), предназначенного для ограничения повышенного напряжения и перегрузочного тока подаваемого на обмотку возбуждения 3 синхронного двигателя 1.
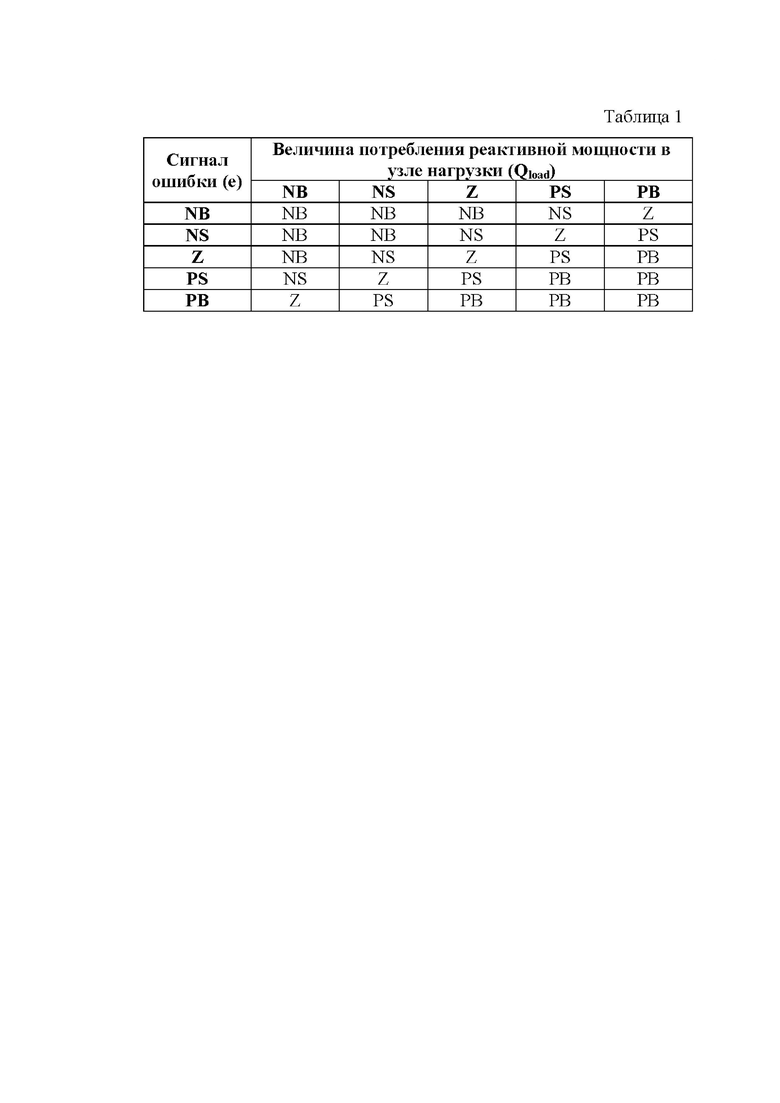
В качестве примера реализации предлагаемого способа управления возбуждением синхронных двигателей насосных станций с применением пакета программ Matlab фирмы The MathWorks Inc была смоделирована схема, приведенная на фиг.1, представляющая из себя синхронный двигатель, подключенный к узлу нагрузки электрической сети. Параметры синхронного двигателя: номинальная активная мощность 800 кВт; номинальный коэффициент мощности 0,85; номинальное напряжение 10 кВ; номинальное количество оборотов 1000; кратность пускового тока 7; КПД 0,94. Будем моделировать присоединение крупной асинхронной нагрузки к узлу подключения синхронного двигателя на 2-й секунде симуляции. Уставка cosϕ нечеткого регулятора установлена на 0,85. На фиг.2 представлен график переходного процесса изменения cosϕ в узле нагрузки. На фиг.3 приведены функции принадлежности входных параметров - изменения cosϕ в виде сигнала ошибки е (фиг.3, а) и уровня потребления реактивной мощности в узле Qload (фиг.3, б), а также выходного параметра - напряжения возбуждения Uf (фиг.3, в). Нечеткий регулятор функционирует на основе базы правил, приведенной в таблице 1 (см. граф. часть), где использованы следующие обозначения: NB (отрицательная большая величина), NS (отрицательная маленькая величина), Z (ноль), PS (положительная маленькая величина) и РВ (положительная большая величина).
Очевидно, что синхронный двигатель, оснащенный нечетким регулятором в качестве системы АРВ, способен поддерживать cosϕ путем управления уровнем реактивной мощности в узле.
Таким образом, описанный способ управления возбуждением синхронных двигателей насосных станций обеспечивает поддержание максимального значения cosϕ с целью минимизации потерь энергии в сети при изменениях нагрузки в подключаемом узле.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| Способ управлением током возбуждения синхронного электродвигателя в послеаварийных процессах энергосистемы | 2017 |
|
RU2658741C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498494C1 |
| Способ управления синхронным генератором при его включении в сеть и устройство для его осуществления | 1981 |
|
SU1092691A1 |
| УСТРОЙСТВО ГРУППОВОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ НА ШИНАХ ЭЛЕКТРОСТАНЦИИВСЕСОЮЗНАЯ | 1971 |
|
SU316170A1 |
| Устройство для автоматического регулирования режимов реактивной мощности узла нагрузки | 1989 |
|
SU1721704A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2289196C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОЙ МАШИНЫ | 1999 |
|
RU2145766C1 |
| СПОСОБ ПОСТРОЕНИЯ АДАПТИВНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ | 2016 |
|
RU2629378C1 |
| Устройство для испытаний синхронного генератора | 1981 |
|
SU974306A1 |
Изобретение относится к области электротехники и может быть использовано в системах автоматического регулирования возбуждения синхронных двигателей насосных станций. Техническим результатом заявленного изобретения является минимизация потерь энергии в сети за счет поддержания максимального значения cosϕ узла нагрузки. Поставленный технический результат достигается тем, что в систему регулирования возбуждения синхронного двигателя, представляющую из себя контроллер на базе нечеткой логики, вносят сигналы стабилизации по отклонению cosϕ и величины потребляемой в узле нагрузки реактивной мощности. 3 ил., 1 табл.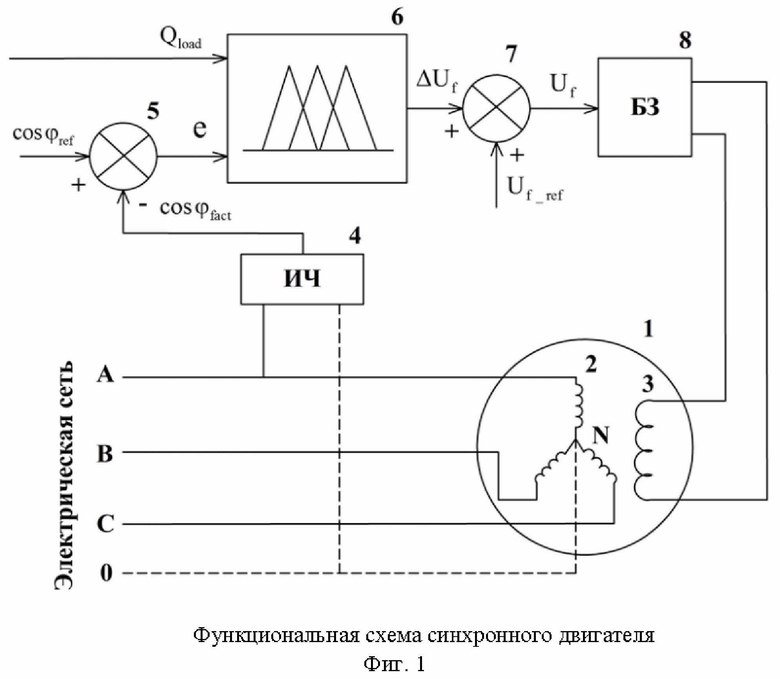
Способ управления возбуждением синхронных двигателей насосных станций, заключающийся в поддержании максимального значения cosϕ узла нагрузки с целью минимизации потерь энергии в сети, отличающийся тем, что в качестве автоматического регулятора возбуждения используют контроллер на основе нечеткой логики, на вход которого поступают сигналы отклонения cosϕ от заданной уставки и величины потребляемой в узле нагрузки реактивной мощности, а выход контроллера суммируют с уставкой напряжения возбуждения и подают на обмотку возбуждения синхронного двигателя.
| CN 109639207 A, 16.04.2019 | |||
| CN 109600084 A, 09.04.2019 | |||
| US 7078825 B2, 18.07.2006 | |||
| СПОСОБ ПОСТРОЕНИЯ АДАПТИВНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ | 2016 |
|
RU2629378C1 |
| CN 110190785 A, 30.08.2019 | |||
| US 10498275 B2, 03.12.2019. | |||

