Изобретение относится к приборо- строению и предназначено для динамо- метрирования почвообрабатыванлцих и посевных машин, а также их рабочих органов.
Целью изобретения является расширение функциональных возможностей прибора за счет измерения координат точек приложения векторов силы и момента.
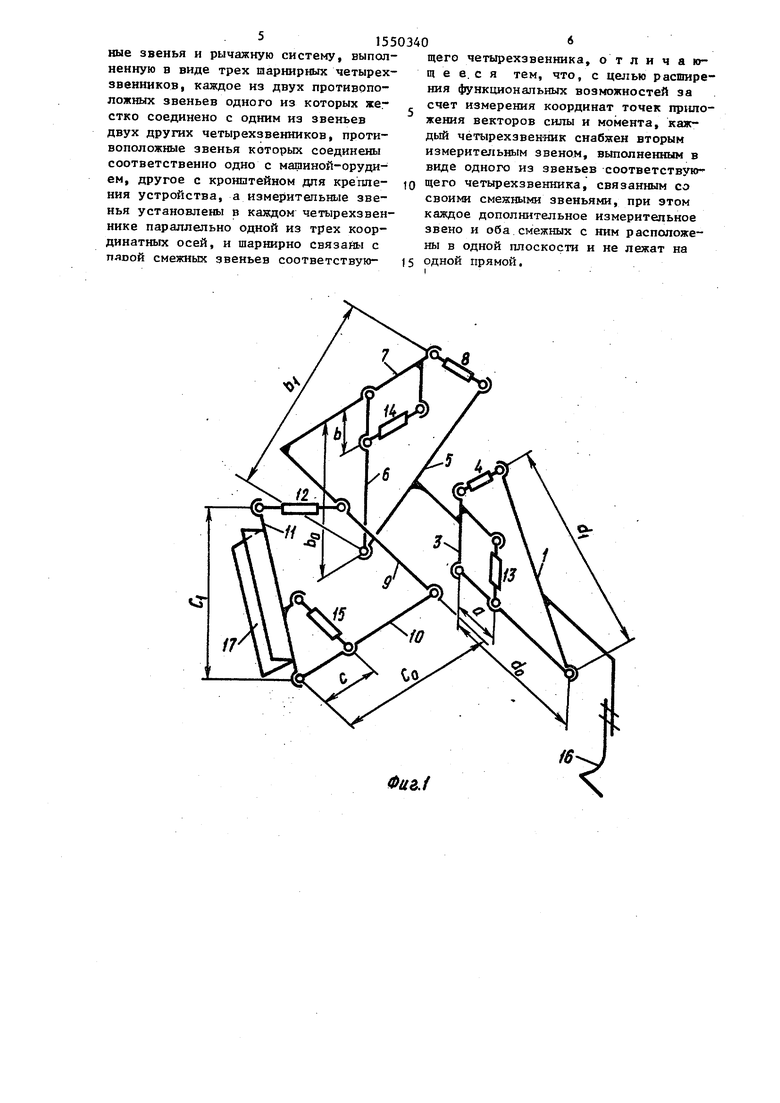
На фиг. 1 изображена кинематическая схема устройства; на фиг, 2 - кинематическая схема одного из четырех- звенников рычажной системы; на фиг.З- пример выполнения устройства.
Устройство содержит три шарнирных четырехзвенника соответственно со звеньями 1-4, 5 - 8 и 9 - 12, измерительные звенья 13, 14 и 15, шар- нирно связанные с парой своих смежных звеньев соответственно 2 и 3, 6 и 7, 10 и 11. Противоположные звенья 5, 7 одного из четырехзвенников жестко связаны соответственно со звеньями 3 ,и 9 двух других четырехзвенников, а звенья 1 и 11, являющиеся противоположными по отношению к звеньям 3 и 9, соединены соответственно с орудием 16 и кронштейном 17 для крепления устройства.
Каждое из измерительных звеньев 13-15 расположено параллельно одной из осей прямоугольной пространственной системы координат, а измерительные звенья 4, 8 и 12 являются од- .новременно звеньями самих четырехзвенников, причем звенья 4, 8 и 12 имеют только шарнирные связи со свои- си смежными звеньями соответственно 1 и 3, 5 и 7, 9 и 11, и вместе с этими звеньями ориентированы в плоскостях соответствующих четырехзвенников под произвольными углами, т.е. не лежат на одной прямой.
Устройство работает следующим образом.
Усилие, приложенное к орудию 16 через звенья 1-4, 5-8, 9г 12 четырехзвенников, воспринимается измерительными звеньями 13 - 15. При этом из условия равновесия звена 1 следует, что
R.
Pz a/a0 + NacosЈ,,
(1)
где R, - вертикальная составляющая
главного вектора; Р - показания измерительного звена 13;
конструктивные параметры прибора;
Nq - показания измерительного звена 4;
Ј, - угол наклона к оси Z измерительного звена 4 (на схеме не показан).
Из условий равновесия звеньев 5 и 9 определяют соответственно составляющие RU и Rx главного вектора:
(2)
5
RU Ь/Ь0 + N6cosЈ 2; Rx Рхк с/с0 + NccosЈ3,
(3)
где PU и Рх - показания измерительных
звеньев 14 и 15;
Ь|Ь0, с,с0 - константы прибора; показания измерительных звеньев 8 и 12 и углы их наклона соответственно к осям Y и X (на схеме не показаны),
Для измерения составляющих главного момента, например, вокруг оси Y (в плоскости четырехзвенника 1 - 4) составляется уравнение равновесия звена 1,-из которого находят
h а-а,/- + R , (4)
где h - плечо составляющей . глав- ного вектора (R + RЈ) ; HQ - показания измерительного
звена 4; а - константа прибора,
Поскольку угол наклона а составляющей R однозначно определяется из равенства
oi arctg(),
то величины h и oi (плечо и угол) однозначно определяют составляющую главного момента вокруг оси Y (или, что то же самое, координаты точки приложения составляющих RX и Rc главного вектора).
Аналогичным образом определяются составляющие главного момента или координаты точек приложения составляющих главного вектора в двух других плоскостях (в четырехзвенниках 5-8 и 9-12). При этом используются показания измерительных звеньев 8, 12 и константы прибора Ъ и с 4. фОрМуЛа изобретения
Устройство для динамометрирования машин-орудий, содержащее измеритель
ные звенья и рычажную систему, выполненную в виде трех шарнирных четырех- звенников, каждое из двух противоположных звеньев одного из которых жестко соединено с одним из звеньев двух других четырехзвенников, противоположные звенья которых соединены соответственно одно с машиной-орудием, другое с кронштейном для крепления устройства, а измерительные звенья установлены в каждом четырехзвен- нике параллельно одной из трех координатных осей, и шарнирно связаны с пяпой смежных звеньев соответствующего четырехзвенника, отличаю- щ е е. с я тем, что, с целью расширения функциональных возможностей за счет измерения координат точек приложения векторов силы и момента, каждый чётырехзвек-ник снабжен вторым измерительным звеном, выполненным в виде одного из звеньев соответствующего четырехзвенника, связанным со своими смежными звеньями, при этом каждое дополнительное измерительное звено и оба смежных с ним расположены в одной плоскости и не лежат на
одной прямой.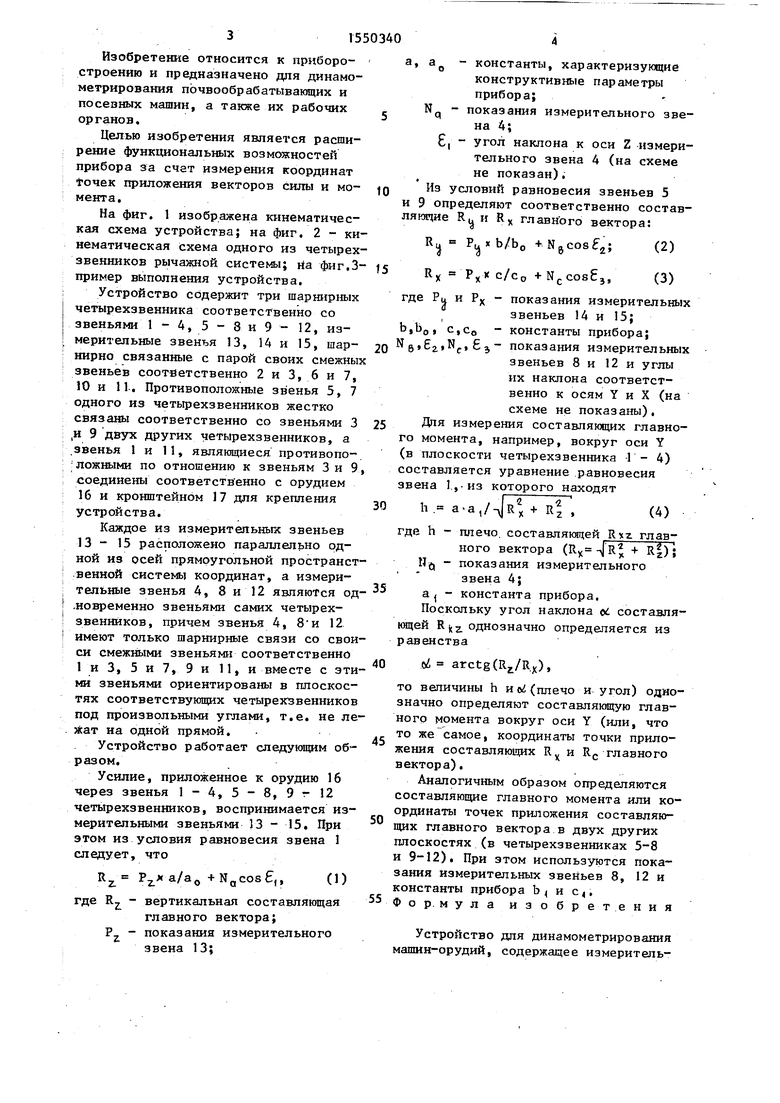
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для измерения сил и моментов | 1984 |
|
SU1167454A1 |
| Устройство для измерения сил и моментов | 1988 |
|
SU1654684A1 |
| Устройство для динамометрирования рабочих органов почвообрабатывающих орудий | 1981 |
|
SU974163A1 |
| Прибор для пространственного динамометрирования | 1990 |
|
SU1760394A1 |
| УСТАНОВКА ДЛЯ ОБЪЕМНОГО ТЕНЗОМЕТРИРОВАНИЯ | 2014 |
|
RU2566398C1 |
| Установка для пространственного динамометрирования навесных сельскохозяйственных машин и орудий | 2018 |
|
RU2682085C1 |
| Устройство для плоскостногодиНАМОМЕТРиРОВАНия РАбОчиХ ОРгАНОВпОчВООбРАбАТыВАющиХ ОРудий | 1979 |
|
SU813164A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2250446C2 |
| Устройство для плоскостного динамометрирования | 1973 |
|
SU494631A1 |
| Тензометрическое устройство для динамометрирования навесных орудий | 1976 |
|
SU567102A1 |
Изобретение относится к приборостроению и предназначено для динамометрирования почвообрабатывающих и посевных машин, а также их рабочих органов. Целью изобретения является расширение функциональных возможностей за счет измерения координат точек приложения векторов силы и момента. Рычажная система устройства состоит из трех шарнирных четырехзвенников 1 - 4, 5 - 8, 9 - 12 и трех измерительных звеньев 13, 14 и 15, каждое из которых шарнирно связано с парой смежных звеньев соответствующего четырехзвенника. Одно из звеньев каждого четырехзвенника также является измерительным. Шесть сигналов измерительных звеньев позволяют вычислить векторы силы и момента, а также определить точки их приложения. 3 ил.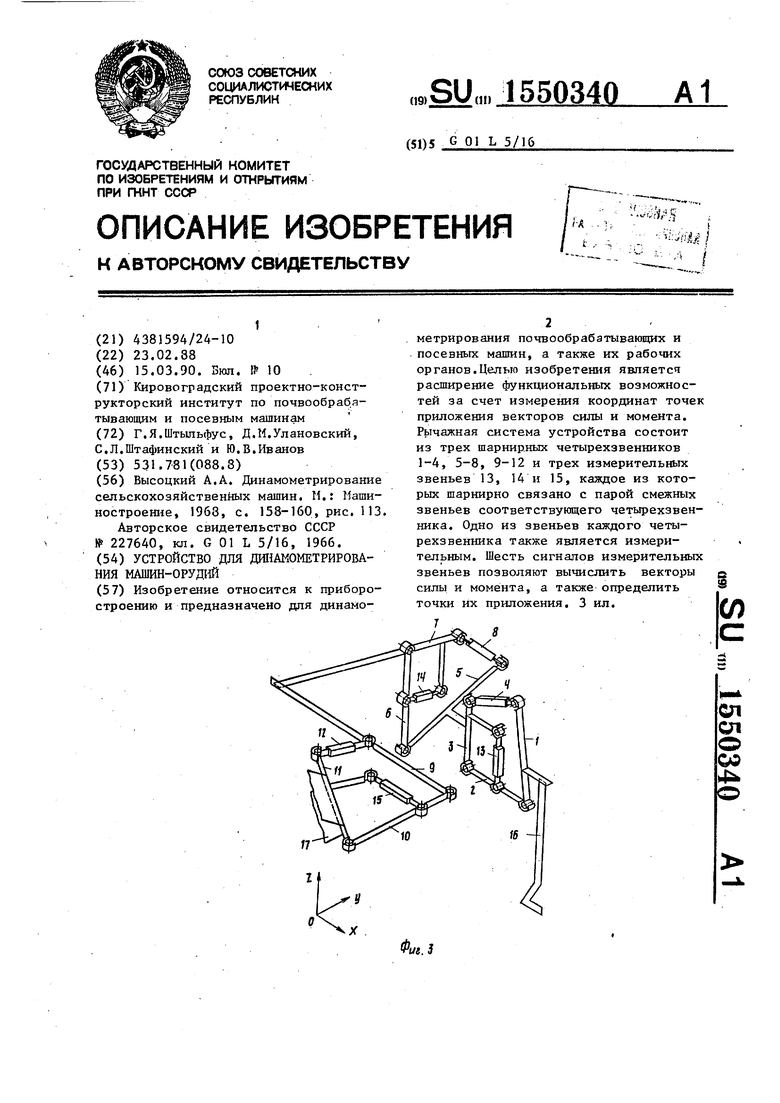
8
Фаг./
м
Фиг. 2
| Высоцкий А.А | |||
| Динамометрирование сельскохозяйственных машин | |||
| М.: Машиностроение, 1968, с | |||
| Система механической тяги | 1919 |
|
SU158A1 |
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| Авторское свидетельство СССР № 227640, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
