формации, два жестких элемента крепления, последовательно соединенных измерительными звеньями, выполненными в виде установленных в стаканах торсионов, при этом связи элементов крепления с измерительными звеньями и измерительных звеньев между собой выполнены жесткими.
К недостатку указанного прибора относится то. что он содержит шесть установлен- ных в стаканах торсионов. Поскольку торсионы со стаканами установлены последовательно, то прибор содержит значительную консоль. В результате элементы конструкции, расположенные в зоне закрепления прибора, должны быть усилены, что обуславливает высокую металлоемкость. Кроме того, наличие шести торсионов, сориентированных в определенных плоскостях, требует высокой точности изготовления прибора, что является причиной сложности конструкции.
Целью изобретения является упрощение конструкциии и снижение металлоемкости.
Указанная цель достигается в приборе для пространственного динамометрирова- ния, содержащем две втулки с параллельными геометрическими осями, в каждой из которых коаксиально размещен торсион, корпус, два элемента крепления, один из которых соединен с концом одного из торсионов, два подшипника для связи торсионов со втулками, один из которых расположен у конца втулки со стороны одного из элементов крепления, и шесть преобразователей деформации, два из которых установлен на торсионах, благодаря тому, что его второй элемент крепления соединен с концом второго торсиона, а второй подшипник расположен у конца втулки со стороны второго элемента крепления, концы торсионов и втулок, противолежащие элементам крепления, обращены друг к другу и жестко соединены между собой корпусом, при этом втулки смещены друг относительно друга в трех направлениях прямоугольной системы координат, одно из которых параллельно геометрическим осям втулок, а на каждой втулке в динамических плоскостях, перпендикулярных двум другим координатным направлениям, размещены по два преобразователя деформации.
Втулки в приборе для пространственного динамометрирования могут быть соединены с корпусом посредством фланцев.
Кроме того, каждый из торсионов предложенного прибора может быть закреплен в соответствующем фланце корпуса.
Сущность изобретения поясняется фиг. 1 и2.
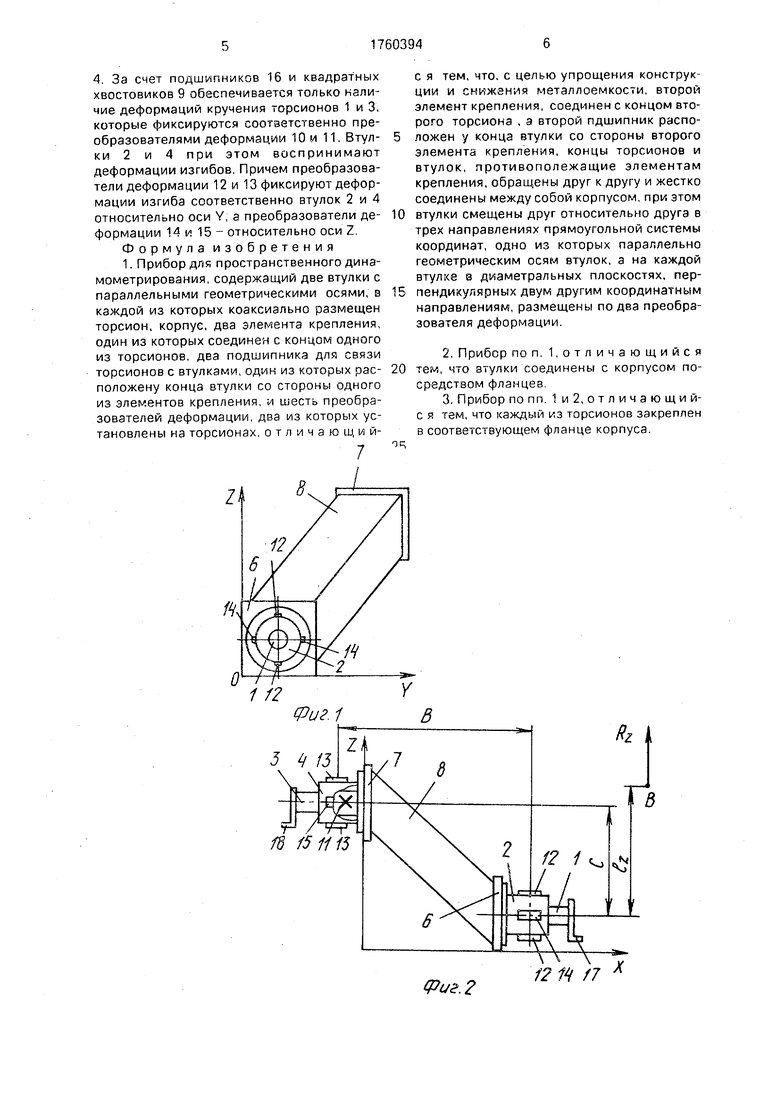
На фиг. 1 изображен в пространственной прямоугольной системе координат OXYZ прибор для пространственного динамометрирования, вид спереди (элемент
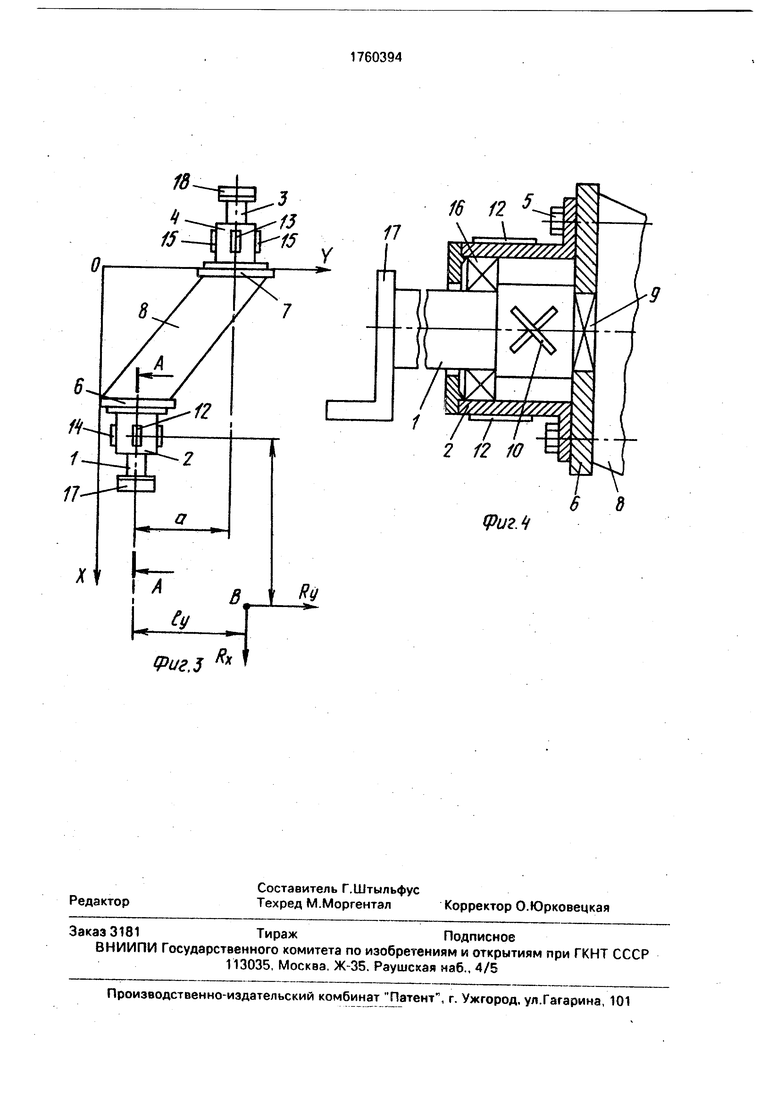
крепления динамометрируемого объекта не показан); на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - разрез А-А на фиг, 3.
Прибор для пространственного динамо0 метрирования содержит переднее измерительное звено, включающее торсион 1 и втулку 2, и заднее измерительное звено, включающее торсирн 3 и втулку 4. Втулки 2 и 4 посредством болтов 5 закреплены соот5 ветственно во фланцах 6 и 7, жестко соединенных между собой корпусом 8, Торсионы 1 и 3 в задней части снабжены квадратными хвостовиками 9, посредством которых торсионы зафиксированы во фланцах 6 и 7 от
0 проворота. Преобразователи деформации 10 и 11 установлены соответственно на торсионах ( и 3 по схемам измерения деформации их кручения относительно продольной осиХ. Преобразователи деформации 12 и 13
5 установлены на втулках 2 и 4 в продольно- вертикальных плоскостях их симметрии и обеспечивают измерение деформации изгиба относительно координатной оси Y. Преобразователи деформаций 14 и 15
0 установлены на втулках 2 и 4 в продольно- горизонтальных полоскостях их симметрии и обеспечивают измерение деформации изгиба относительно координатной оси Z. При этом торсионы 1 и 3 установлены во втулках
5 2 и 4 на подшипниках 16, расположенных у концов, противолежащих корпусу 8. Нэ тор- сионе 1 установлен элемент крепления 17, соединяемый с динамометрируемым объектом (в точке В приложено усилие от динамо0 метрируемого объекта, характеризующееся составляющими Rx, Ry и Rz главного вектора), а посредством элемента крепления 18, соединенного с торсионом 3, прибор устанавливается на тяговом средстве (на фигу5 pax не изображено). Расстояние между измерит- ельными звеньями по оси X равно Ь, по оси Y равно а, по оси Z равно с, Расстояния между точкой В и передним измерительным звеном по оси X обозначены х.
0 по оси Y - ly, по оси Z - lz.
Прибор для пространственного динамометрирования работает следующим образом.
В процессе движения тягового средства
5 за счет элемента крепления 18 осуществляется движение прибора. При этом нагрузка, приложенная к рабочему органу в точке В, через элемент крепления 17 передается на торсион 1, втулку 2 и далее через болты 5. фланцы 6 и 7 и корпус 8- на торсион 3 и втулку
4. За счет подшипников 16 и квадратных хвостовиков 9 обеспечивается только наличие деформаций кручения торсионов 1 и 3, которые фиксируются соответственно преобразователями деформации 10 и 11. Втулки 2 и 4 при этом воспринимают деформации изгибов. Причем преобразователи деформации 12 и 13 фиксируют деформации изгиба соответственно втулок 2 и 4 относительно оси Y, а преобразователи деформации 14 и 15 - относительно оси Z Формула изобретения 1. Прибор для пространственного дина- мометрирования, содержащий две втулки с параллельными геометрическими осями, в каждой из которых коаксиально размещен торсион, корпус, два элемента крепления, один из которых соединен с концом одного из торсионов, два подшипника для связи торсионов с втулками, один из которых рас- положену конца втулки со стороны одного из элементов крепления, и шесть преобразователей деформации, два из которых установлены на торсионах, отличающийИ
0
с я тем, что. с целью упрощения конструкции и снижения металлоемкости, второй элемент крепления, соединен с концом второго торсиона , а второй пдшипник расположен у конца втулки со стороны второго элемента крепления, концы торсионое и втулок, противополежащие элементам крепления, обращены друг к другу и жестко соединены между собой корпусом, при этом втулки смещены друг относительно друга в трех направлениях прямоугольной системы координат, одно из которых параллельно геометрическим осям втулок, а на каждой втулке в диаметральных плоскостях, перпендикулярных двум другим координатным направлениям, размещены по два преобразователя деформации.
2.Прибор по п. 1,отличающийся тем, что втулки соединены с корпусом посредством фланцев
3.Прибор попп. 1 и 2, отличающий- с я тем, что каждый из торсионов закреплен
в соответствующем фланце корпуса,
Y

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения сил и моментов | 1988 |
|
SU1654684A1 |
| Прибор для измерения сил и моментов | 1984 |
|
SU1167454A1 |
| Установка для пространственного динамометрирования навесных сельскохозяйственных машин и орудий | 2018 |
|
RU2682085C1 |
| Упругая муфта | 1985 |
|
SU1259058A1 |
| ТРЕХКОМПОНЕНТНЫЙ ДИНАМОМЕТР | 1972 |
|
SU453594A1 |
| Устройство для динамометрирования рабочих органов почвообрабатывающих орудий | 1981 |
|
SU974163A1 |
| Крутильный динамометр | 1937 |
|
SU63810A1 |
| УСТАНОВКА ДЛЯ ОБЪЕМНОГО ТЕНЗОМЕТРИРОВАНИЯ | 2014 |
|
RU2566398C1 |
| Устройство для динамометрирования прицепных сельскохозяйственных машин | 1987 |
|
SU1432352A1 |
| Устройство для измерения осевого усилия и крутящего момента,действующих на колесо | 1985 |
|
SU1359689A1 |
Изобретение относится к области приборостроения. Цель изобретения - упрощение конструкции и снижение металлоемкости. Посредством элемента крепления 18, соединенного с концом торсиона 3, коаксиально размещенного с помощью первого подшипника во втулке 4, прибор устанавливается на тяговом средстве. Нагрузка, приложенная к рабочему органу, через крепления 17 передается на торсион 1, коаксиально установленный с помощью второго подшипника во Изобретение относится к технике для измерения сил и моментов и, преимущественно, может быть использовано для дина- мометрирования почвообрабатывающих и посевных машин, а также их рабочих органов. Известен многокомпонентный 1-коор- динатныи датчик, содежащий два фланца, преобразователи деформации, установленные на шести стержнях, соединенных концами с фланцами через сферические втулке 2. Подшипники установлены у концов втулок 2 и 4, расположенных соответственно со стороны элемента крепления 17 и 18, другие концы втулок 2 и 4 и лежащие в одном с ними направлении концы торсио- нов 1 и 3 жестко соединены между собой корпусом 8 и смещены относительно друг друга в трех направлениях прямоугольной системы координат, одно из которых параллельно геометрическим осям втулок. Благодаря такой связи элементов прибора нагрузка от торсиона 1 передается на втулку 2 и далее через корпус 8 - на торсион 3 и втулку 4. Деформации кручения торсионов 1 и 3 фиксируются установленными на них преобразователями деформации. Втулки 2 и 4, на каждой из которых в диаметральных плоскостях, перпендикулярных двум другим координатным направлениям, размещены по два преобразователя деформации 12, 14 и 13, 15, воспринимают деформации изгибов. Причем преобразователи 12 и 13 реагируют на деформации изгиба относительно одного координатного направления, а преобразователи 14 и 15 - относительно другого координатного направления. 2 з.п. ф-лы, 4 ил. шарниры, причем шарниры размещены на каждом фланце в шести несовпадающих точках. Недостатком этого датчика является узкий диапазон измерения и невысокая его чувствительность. Наиболее близким по технической сущности и достигаемому результату к предложенному устройству является прибор для пространственного динамометрирования, содержащий шесть преобразователей деX О О СО ю N
Фиг 1
f8 151115
Фиг. 2
х х х 12 М /7 х
1д
-
Q
15
X
Фиг.З
К
16 12 5д
| Многокомпонентный @ -координатный датчик (его варианты) | 1984 |
|
SU1185128A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения сил и моментов | 1988 |
|
SU1654684A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
