Изобретение относится к авиадвигателестроению, к испытательным стендам для испытаний турбореактивных двигателей с управляемым вектором тяги и может быть использовано при проектировании и доводке таких двигателей и/или турбореактивных двигателей с реверсированием тяги.
Известен стенд для испытания авиационных газотурбинных двигателей [1], содержащий динамометрическую платформу, установленную на упругих опорах, систему силоизмерения прямой осевой тяги и П-образную раму с испытуемым двигателем.
Недостатком этого стенда является невозможность выполнения измерений тяги с направлением вектора тяги, отличным от осевого.
Известен стенд для испытания реактивного двигателя [2], содержащий динамометрическую платформу с закрепленным с помощью переходной рамы испытуемым двигателем, установленную на упругих опорах на закрепленной на силовом фундаменте опорной раме, измерительные и градуировочные преобразователи усилий, систему предварительной загрузки силоизмерительного электропреобразователя усилия прямой осевой тяги, систему тарировки градуировочного преобразователя усилия через систему рычагов, соединенных с нагрузочным электромеханизмом.
Недостатком данного стенда является так же, как и у [1], невозможность выполнения измерений тяги с направлением вектора тяги, отличным от осевого, что не позволяет проводить испытания турбореактивных двигателей с управляемым вектором тяги.
Задачей изобретения является обеспечение измерений тяги по осям трехмерного пространства, в направлении действия измеряемых усилий, с заданной точностью.
Для достижения указанной задачи стенд для испытания турбореактивного двигателя содержит динамометрическую платформу с закрепленным с помощью переходной рамы испытуемым двигателем, установленную на упругих опорах на закрепленной на силовом фундаменте опорной раме, измерительные и градуировочные преобразователи усилий, систему предварительной загрузки силоизмерительного электропреобразователя усилия осевой тяги, систему тарировки градуировочного преобразователя усилия через систему рычагов, соединенных с нагрузочным электромеханизмом. А для испытания турбореактивных двигателей с управляемым по направлению вектором тяги динамометрическая платформа выполнена с возможностью перемещения по трем осям координат, в направлении действия измеряемых усилий, при этом между опорной рамой и динамометрической платформой установлена опора силоприемная, закрепленная на опорной раме, на которой размещены три силоизмерительных модуля для измерения Rx - горизонтальной составляющей тяги, Ry - вертикальной составляющей тяги и Rz - боковой составляющей тяги и тарировки систем измерений, при этом динамометрическая платформа кинематически связана с силоприемной опорой и через системы рычажного типа с упругими шарнирами первичных преобразователей усилий Rx, Ry, Rz, а сами силоизмерительные модули снабжены системой предварительной загрузки модулей и системой возврата платформы в нулевое положение и контроля линейных перемещений по оси "Х".
Кроме того, это достигается тем, что:
а) Силоизмерительный модуль "Rx" содержит измерительный и градуировочный преобразователи усилия по обе стороны от центральной поперечной балки платформы на оси ее симметрии, обращенные рабочими зонами по направлению усилия и против него, и гидронагружатели, противолежащие им, закрепленные на силоприемной опоре, соединенные силопередающими штангами, выполненными с возможностью регулирования длины, при этом динамометрическая платформа опирается на четыре вертикальные упругие опоры, обеспечивающие ей степень свободы по осям "X" и "Z", опирающиеся на две пары силоприемных разноплечих рычагов, закрепленных через упругие шарниры на опорной раме, каждая пара рычагов соединена между собой упругими шарнирами и с парой суммирующих рычагов по вертикали "У", расположенных в поперечной плоскости и закрепленных на опорной раме.
б) Силоизмерительный модуль "Ry" содержит измерительный и градуировочный преобразователи усилия, расположенные соответственно: один в плоскости главной поперечной балки платформы, закрепленный на опорной раме, другой - на оси симметрии платформы на кормовой поперечной балке платформы, соединенные через шарнир с парой разноплечих рычагов, закрепленных на опорной раме, перекрещивающихся в пространстве с двумя парами разноплечих силоприемных рычагов, расположенных вдоль опорной рамы, соединенных между собой тягами и закрепленных на ней, служащих опорой для вертикальных упругих опор динамометрической платформы, уравновешивающих систему в плоскости "У", градуировочный преобразователь при тарировке соединен штангой с гидронагружателем.
в) Силоизмерительный модуль "Rz" содержит измерительный и градуировочный преобразователи усилия, расположенные в плоскости платформы: один - изнутри на главной продольной балке динамометрической платформы, контактирующий через силопередающие штанги с гидронагружателями, закрепленными на силоприемной опоре, а другой соответственно закреплен на силоприемной опоре и кинематически соединен через пару разноплечих рычагов, закрепленных на силоприемной опоре, с платформой, соединенные через силопередающие штанги между собой и с регулируемым упором, закрепленным на платформе.
г) Система предварительной загрузки силоизмерительных модулей, взаимодействующих с динамометрической платформой и первичными электропреобразователями усилий, содержит:
для "Rx" - пару разноплечих рычагов с грузами, расположенных симметрично по обе стороны от продольной оси платформы, закрепленных на силоприемной опоре и соединенных тягами с главной поперечной балкой платформы,
для "Ry" - разноплечее коромысло с грузами, расположенное во фронтальной плоскости, закрепленное на силоприемной стойке опорной рамы и соединенное тягой с парой суммирующих рычагов и далее кинематически с платформой,
для "Rz" - равноплечий рычаг с грузами, расположенный в поперечной плоскости, закрепленный на силоприемной стойке опоры и соединенный тягой с платформой.
д) Система возврата платформы в нулевое положение и контроля линейных перемещений по оси "X" выполнена в виде последовательно установленных по оси платформы и кинематически связанных между собой корпуса гидрораспределителя, неподвижно установленного на центральной опорной раме корпуса, и золотника гидрораспределителя, соединеннего тягой с кронштейном, закрепленным на центральной поперечной балке платформы, и гидравлически трубопроводом с гидронагружателем и гидравлической системой, к кронштейну посредством тяги присоединен подвижный элемент преобразователя линейного перемещения, соединенный с вторичным прибором, по показаниям которого контролируется величина перемещения платформы и связанного с ней золотника, при этом золотник гидрораспределителя при монтаже и юстировке устанавливается так, что его нулевое положение соответствует строго вертикальному положению четырех упругих опор динамометрической платформы, в этом положении между преобразователем усилий "Rx" и силопередающими штангами устанавливаются зазоры, равные удвоенному максимальному перемещению платформы, и фиксируются упором кронштейна, установленным на силоприемной опоре, и главной поперечной балкой платформы.
Новым здесь является то, что для испытания двигателей с управляемым по направлению вектором тяги динамометрическая платформа выполнена с возможностью перемещения по трем осям координат, в направлении действия измеряемых усилий, при этом между опорной рамой и динамометрической платформой установлена опора силоприемная, закрепленная на опорной раме, на которой размещены три силоизмерительных модуля для измерения Rx - горизонтальной составляющей тяги, Ry - вертикальной составляющей тяги и Rz - боковой составляющей тяги и тарировки систем измерений, при этом динамометрическая платформа кинематически связана с силоприемной опорой и через системы рычажного типа с упругими шарнирами первичных преобразователей усилий Rx, Ry, Rz, а сами силоизмерительные модули снабжены системой предварительной загрузки модулей и системой возврата платформы в нулевое положение и контроля линейных перемещений по оси "X".
Кроме того, для испытания двигателей с управляемым по направлению вектором тяги силоизмерительные модули Rx, Ry и Rz размещены под динамометрической платформой, кинематически связанной с жесткой силоприемной опорой, выполненной прямоугольной формы с размерами в плане меньшими, чем платформа, закрепленной на опорной раме, установленной на фундаменте.
Выполнив динамометрическую платформу с возможностью перемещения по трем осям координат, в направлении действия измеряемых усилий, при этом между опорной рамой и динамометрической платформой установлена опора силоприемная, закрепленная на опорной раме, на которой размещены три силоизмерительных модуля для измерения Rx - горизонтальной составляющей тяги, Ry - вертикальной составляющей тяги и Rz - боковой составляющей тяги и тарировки систем измерений, при этом динамометрическая платформа кинематически связана с силоприемной опорой и через системы рычажного типа с упругими шарнирами первичных преобразователей усилий Rx, Ry, Rz, а сами силоизмерительные модули снабжены системой предварительной загрузки модулей и системой возврата платформы в нулевое положение и контроля линейных перемещений по оси "Х", мы получаем возможность производить комплексные измерения горизонтального, вертикального и бокового усилия в процессе испытаний турбореактивного двигателя с управляемым по направлению вектором тяги.
Выполнив силоизмерительные модули Rx, Ry и Rz размещенными под динамометрической платформой, внутри жесткой силоприемной опоры, выполненной прямоугольной формы с размерами в плане меньшими чем платформа, закрепленной на опорной раме, установленной на фундаменте, мы получаем возможность повысить точность испытаний на установившихся режимах при упрощении его конструкции.
Выполнив систему предварительной загрузки модулей с измерительными системами, мы получаем возможность производить измерение знакопеременных усилий.
Выполнив систему возврата динамометрической платформы в нулевое положение по оси в процессе испытания двигателя, мы получаем возможность полностью "вывесить" тарный вес платформы с испытуемым двигателем по оси "Y" с помощью разноплечего коромысла и грузов и таким образом получаем возможность замерять усилие Ry.
Выполнив систему контроля линейных перемещений по оси "X", мы получаем возможность через преобразователь линейных перемещений, с его подвижным элементом, настраивать величину перемещения динамометрической платформы стенда.
Из уровня техники неизвестен стенд для испытания турбореактивных двигателей с управляемым по направлению вектором тяги, у которого динамометрическая платформа выполнена с возможностью перемещения по трем осям координат, в направлении действия измеряемых усилий, при этом между опорной рамой и динамометрической платформой установлена опора силоприемная, закрепленная на опорной раме, на которой размещены три силоизмерительных модуля для измерения Rx - горизонтальной составляющей тяги, Ry - вертикальной составляющей тяги и Rz - боковой составляющей тяги и тарировки систем измерений, при этом динамометрическая платформа кинематически связана с силоприемной опорой и через системы рычажного типа с упругими шарнирами первичных преобразователей усилий Rx, Ry, Rz, а сами силоизмерительные модули снабжены системой предварительной загрузки модулей и системой возврата платформы в нулевое положение и контроля линейных перемещений по оси "X". Поэтому можно сделать вывод о соответствии заявленного технического решения критериям "новизна" и "изобретательский уровень".
Заявленное изобретение поясняется чертежами, где показана конструктивная схема стенда для испытания турбореактивного двигателя:
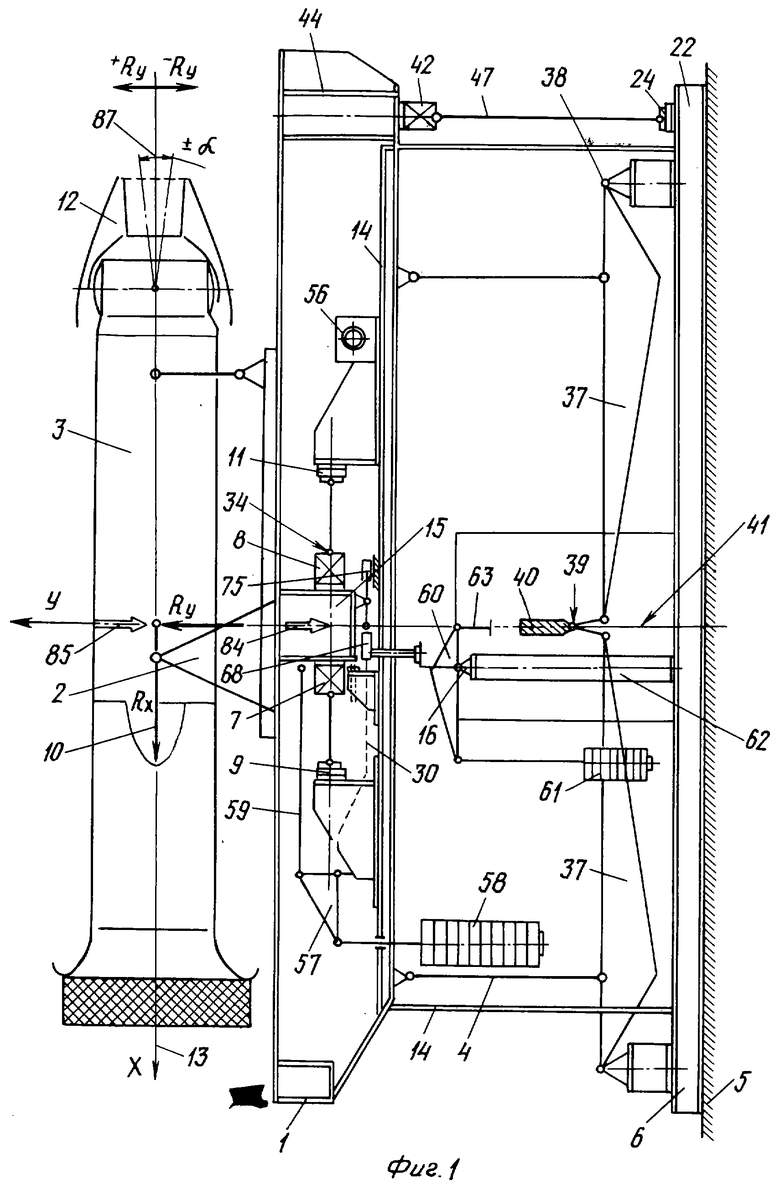
На Фиг.1 - продольный вид.
На Фиг.2 - вид сверху на динамометрическую платформу, силоприемную опору и др.
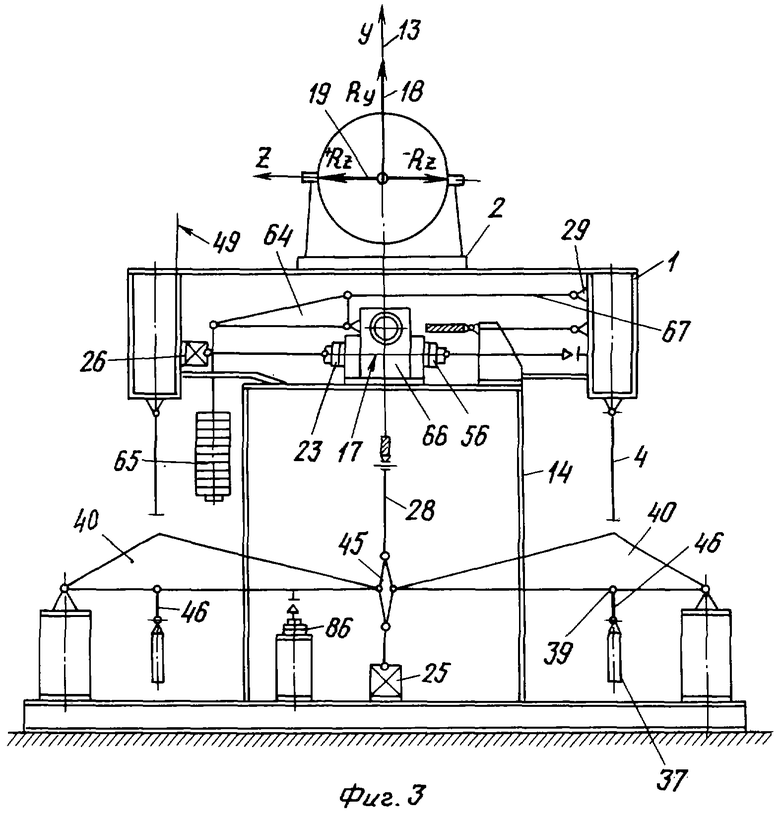
На Фиг.3 - вид спереди.
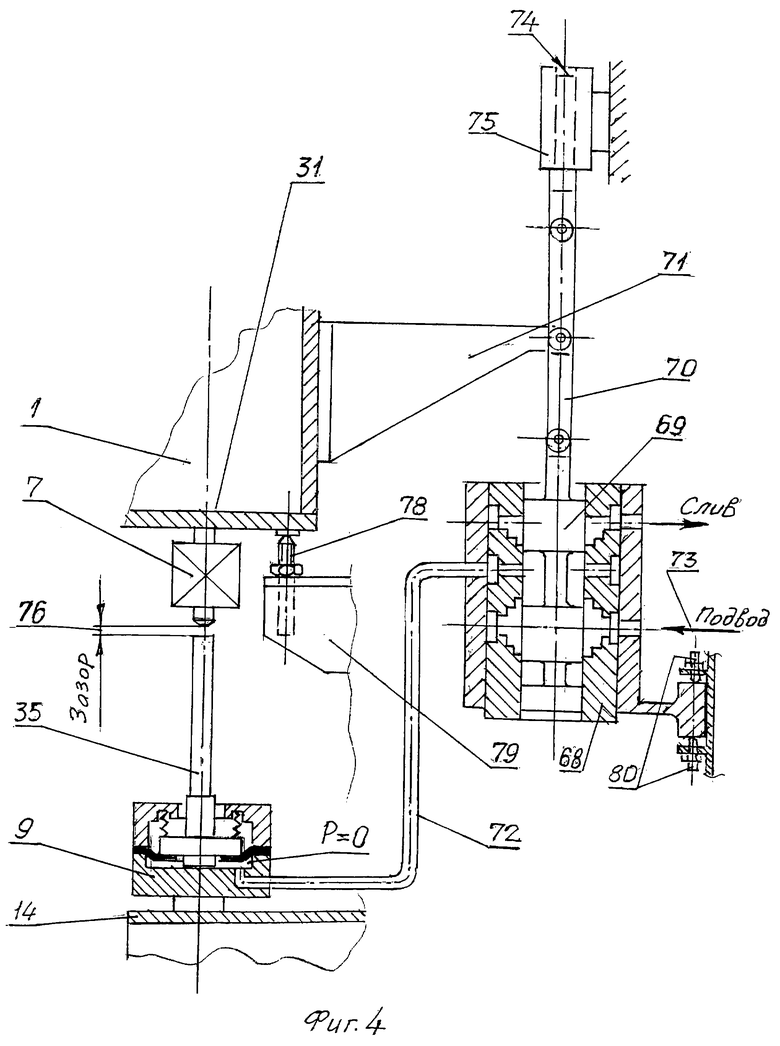
На Фиг.4 - принципиальная схема системы измерения усилия Rx и системы возврата платформы в нулевое положение и контроля линейных перемещений, в положении Rx=0.
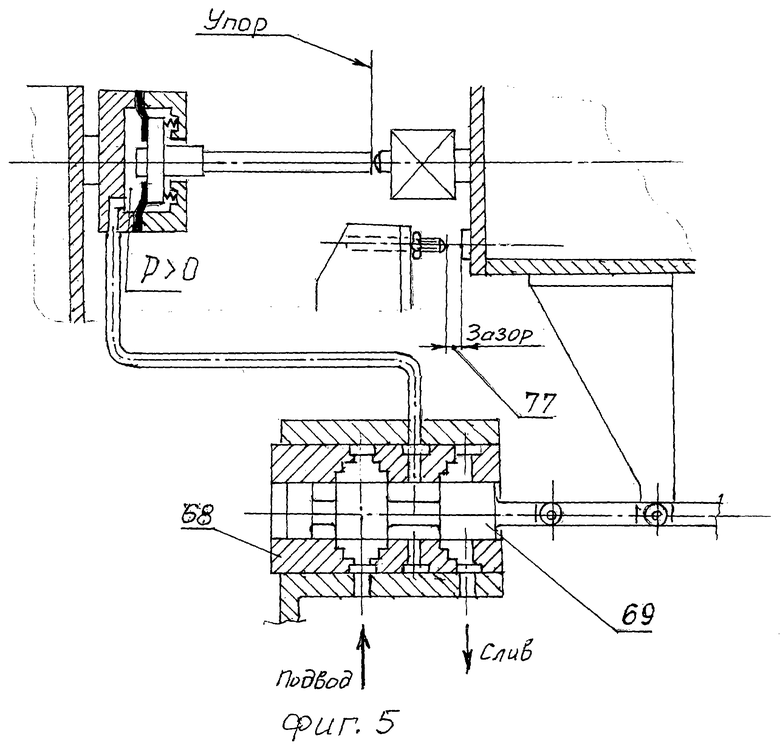
На Фиг.5 - принципиальная схема системы измерения усилия Rx и системы возврата платформы в нулевое положение и контроля линейных перемещений в положении измерения Rx.
Стенд для испытания турбореактивного двигателя с управляемым по направлению вектором тяги содержит динамометрическую платформу 1 с переходной рамой 2 для закрепления испытуемого двигателя 3, установленную на упругих опорах 4 на закрепленной на силовом фундаменте 5 опорной раме 6, измерительные 7 и градуировочные 8 преобразователи усилий, систему предварительной загрузки силоизмерительного электропреобразователя 9 усилия осевой тяги 10, систему тарировки градуировочного 8 преобразователя усилия 11. Для испытания двигателей 3 с управляемым по направлению вектором тяги при помощи поворотного реактивного сопла 12 динамометрическая платформа 1 выполнена с возможностью перемещения по трем осям координат 13, при этом между опорной рамой 6 и динамометрической платформой 1 установлена опора силоприемная 14, закрепленная на опорной раме 6, на которой размещены три силоизмерительных модуля 15, 16 и 17 для измерения Rx - горизонтальной составляющей тяги 10, Ry - вертикальной составляющей тяги 18 и Rz - боковой составляющей тяги 19, и тарировка систем измерений 20, 21, 22 осуществляется методом непосредственного нагружения динамометрической платформы 1 с помощью гидронагружателей 11, 23, 24, при этом динамометрическая платформа 1 кинематически связана с силоприемной опорой 14 и через системы рычажного типа с упругими шарнирами первичных преобразователей усилий Rx – 7, Ry - 25, Rz - 26, а сами силоизмерительные модули 15, 16, 17 снабжены системой предварительной загрузки модулей 27, 28, 29 и системой возврата 30 платформы 1 в нулевое положение и контроля линейных перемещений по оси "X".
Силоизмерительный модуль "Rx" 15 содержит измерительный 7 и градуировочный 8 преобразователи усилия по обе стороны от центральной поперечной балки 31 платформы 1 на оси 32 ее симметрии, обращенные рабочими зонами 33, 34 по направлению усилия 10 и против него, и гидронагружатели 9, 11, противолежащие им, закрепленные на силоприемной опоре 14, соединенные силопередающими штангами 35, 36, выполненными с возможностью регулирования длины, при этом динамометрическая платформа 1 опирается на четыре вертикальные упругие опоры 4, которые обеспечивают ей степень свободы по осям 13 "X" и "Z", опирающиеся на две пары силоприемных разноплечих рычагов 37, закрепленных через упругие шарниры 36 на опорной раме 6, каждая пара рычагов 37 соединена между собой упругими шарнирами 39 и с парой суммирующих рычагов 40 по вертикали "У", расположенных в поперечной плоскости 41 и закрепленных на опорной раме 6.
Силоизмерительный модуль "Ry" 16 содержит измерительный 25 и градуировочный 48 преобразователи усилия, расположенные соответственно: один в плоскости главной поперечной балки 43 платформы 1, закрепленный на опорной раме 6, другой - на оси 32 симметрии платформы 1 на кормовой поперечной балке 44 платформы 1, соединенные через шарнир 45 с парой разноплечих рычагов 40, закрепленных на опорной раме 6, перекрещивающихся в пространстве с двумя парами разноплечих силоприемных рычагов 37, расположенных вдоль опорной рамы 6, соединенных между собой тягами 46 и закрепленных на ней, служащих опорой для вертикальных упругих опор 4 динамометрической платформы 1, уравновешивающих систему в плоскости "У", градуировочный 42 преобразователь при тарировке соединен штангой 47 с гидронагружателем 24.
Силоизмерительный модуль "Rz" 17 содержит измерительный 48 и градуировочный 26 преобразователи усилия, расположенные в плоскости платформы 1: один - изнутри на главной продольной балке 49 динамометрической платформы 1, контактирующий через силопередающую штангу 50 с гидронагружателем 23, закрепленным на силоприемной опоре 14, а другой соответственно закреплен на силоприемной опоре 14 и кинематически соединен через пару разноплечих рычагов 51, закрепленных на силоприемной опоре 14, соединенных через силопередающие штанги 52, 53 с платформой 1 и с измерительным 46 преобразователем усилия и с регулируемым упором 54, закрепленным на платформе 1 и соединенным штангой 55 с гидронагружателем 56.
Система предварительной загрузки силоизмерительных модулей 15, 16, 17, взаимодействующих с динамометрической платформой 1 и первичными электропреобразователями усилий 7, 25, 48, содержит: для "Rx" 15 - пару разноплечих рычагов 57 с грузами 58, расположенных симметрично по обе стороны от продольной оси 32 платформы 1, закрепленных на силоприемной опоре 14 и соединенных тягами 59 с главной поперечной балкой 31 платформы 1, для "Ry" 16 - разноплечее коромысло 60 с грузами 61, расположенное во фронтальной плоскости, закрепленное на силоприемной стойке 62 опорной рамы 6 и соединенное тягой 63 с парой суммирующих рычагов 40 и далее кинематически с платформой 1, для "Rz" 17 - разноплечий рычаг 64 с грузами 65, расположенный в поперечной плоскости, закрепленный на силоприемной стойке 66 опоры 14 и соединенный тягой 67 с платформой 1.
Система возврата 30 платформы 1 в нулевое положение и контроля линейных перемещений по оси "X" выполнена в виде последовательно установленных по оси 32 платформы 1 и кинематически связанных между собой корпуса гидрораспределителя 68, неподвижно установленного на центральной опорной раме 14 корпуса, и золотника 69 гидрораспределителя 68, соединенного тягой 70 с кронштейном 71, закрепленным на центральной поперечной балке 31 платформы 1, и гидравлически трубопроводом 72 с гидронагружателем 9 и гидравлической системой 73, к кронштейну 71 посредством тяги 70 присоединен подвижный элемент 74 преобразователя линейного перемещения 75, соединенный с вторичным прибором, по показаниям которого контролируется величина перемещения платформы 1 и связанного с ней золотника 69, при этом золотник 69 гидрораспределителя 68 при монтаже и юстировке устанавливается так, что его нулевое положение соответствует строго вертикальному положению четырех упругих опор 4, служащих опорами для динамометрической платформы 1, в этом положении между преобразователем усилий "Rx" 7 и силопередающими штангами 35 устанавливаются зазоры 76, 77, равные удвоенному максимальному перемещению платформы 1, и фиксируются упором 76 кронштейна 79, установленным на силоприемной опоре 14, и главной поперечной балкой 31 платформы 1.
Стенд для испытания турбореактивного двигателя работает следующим образом.
Перед проведением испытания турбореактивного двигателя 3 с управляемым по направлению вектором тяги при помощи поворотного реактивного сопла 12 необходимо провести трехкратную тарировку систем измерений силоизмерительных модулей "Rx, "Ry", "Rz". Она производится при установленном на динамометрической платформе 1 испытуемом двигателе 3 с присоединенными системами питания и управления, другими разъемами и всеми остальными системами двигателя 3 с тем, чтобы при градуировке была учтена их жесткость.
Проверить, что динамометрическая платформа 1 находится на упоре 78 (см. Фиг. 4) в "нулевом" положении, соответствующем вертикальному положению стоек упругих опор 4, при необходимости восстановить "нулевое" положение платформы 1, вращая винт упора 78. Записать показания вторичного прибора преобразователя линейного перемещения 75. Между силопередающей штангой 35 и преобразователем 7 установить зазор 76. Вращением винта упора 78 (Фиг.4) уменьшить зазор 76 между штангой 35 и преобразователем 7 в два раза.
Грузы 58, 61, 65 предварительной загрузки силоизмерителей 7, 25, 48 необходимо снять, чтобы силоизмерительные и градуировочные электропреобразователи усилий 7, 8, 25, 42, 26, 48 нагружались в одинаковых условиях. Создать давление в гидросистеме 73. С помощью регулировочных винтов 80 перемещать корпус гидрораспределителя 68 до тех пор, пока динамометрическая платформа 1 не займет исходное "нулевое" положение, соответствующее показаниям преобразователя линейных перемещений 75, то есть ранее зафиксированных. При этом между упором 78 и платформой 1 установится половинный зазор, равный 1/2 от зазора 76. Сброс и подачу давления повторить несколько раз и убедиться, что платформа 1 каждый раз возвращается в "нулевое" положение.
При измерении усилия Rx в процессе испытания двигателя 3, необходимо выполнить ряд операций: записать показания вторичного преобразователя усилия 7, подвести гидросмесь под давлением к гидрораспределителю 66, по показаниям вторичного (указательного) прибора преобразователя линейного 75, что платформа 1 вернулась в нулевое положение, записать показания вторичного прибора системы измерения усилия Rx, убрать давление в гидросистеме и в гидронагружателе 9.
Градуировка системы измерения усилия ее выполняется с помощью преобразователя усилий 8 и гидронагружателя 11. После окончания градуировки эталонный преобразователь усилий 8 снимается и хранится в лаборатории.
Перед измерением усилия Ry необходимо произвести арретирование (взвешивание) преобразователя усилия 25 от массы Gдмп 84 и массы Сдвиг 85, путем создания давления в гидронагружателе 86, записать показания вторичного (указательного) прибора системы измерения усилия Ry, убрать давление в гидронагружателе 86, записать показания вторичного прибора системы измерения усилия Ry.
Градуировка системы измерения усилия Ry выполняется с помощью преобразователя усилий 42 и гидронагружателя 24. После окончания градуировки эталонный преобразователь усилий 42 снимается и хранится в лаборатории.
Градуировка системы измерения усилия Rz выполняется с помощью преобразователя усилий 26 и гидронагружателя 23, аналогично градуировке системы измерения усилия Rx.
Перед началом испытаний двигателя 3 вновь устанавливают грузы 58, 61, 65 предварительной загрузки силоизмерительных модулей 15, 16, 17, что позволяет выбрать люфты в силоизмерительной системе, а также исключить нестабильные при малых нагрузках участки характеристик электропреобразователей усилий и таким образом повысить точность измерений.
При работе стенда для испытания турбореактивного двигателя 3 с управляемым по направлению вектором тяги при помощи поворотного реактивного сопла 12 в одной или во всех требуемых плоскостях ориентации в пространстве, испытываемый двигатель 3 первоначально находится в исходном положении, ориентированном вдоль продольной оси, и выходит на форсажный режим.
Далее, при изменении направления вектора тяги в пределах углов 87 ориентации в пространстве в задней полусфере двигателя происходит комплексное измерение горизонтального 10, вертикального 18 и бокового (поперечного) 19 усилий составляющих тяги в процессе испытания по программе.
После проведения испытаний показания силоизмерительных электропреобразователей 7, 25, 48 должны снова вернуться к "условному нулю", что является гарантией их исправной работы при испытаниях и обеспечивает продолжение испытаний двигателя 3.
Таким образом, такое выполнение стенда обеспечивает измерение тяги по осям трехмерного пространства, в направлении действия измеряемых усилий, с заданной точностью.
Источники информации
1. SU, авторское свидетельство, № 1572195, кл. G 01 H 15/00.
2. RU, патент №2117272, кл. G 01 M 15/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОМПОНЕНТОВ СИЛЫ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 2004 |
|
RU2276279C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РЕАКТИВНОГО ДВИГАТЕЛЯ | 1996 |
|
RU2117272C1 |
| ПОВЕРОЧНОЕ ГРАДУИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ СИЛОИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ | 1997 |
|
RU2135972C1 |
| СПОСОБ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ПОВОРОТНЫМ РЕАКТИВНЫМ СОПЛОМ | 2002 |
|
RU2216005C1 |
| Стенд для измерения нагрузок, воздействующих на объект авиационной техники | 2017 |
|
RU2651627C1 |
| Устройство для измерения силы тяги двигателя | 1990 |
|
SU1758454A2 |
| Градуировочное устройство силоизмерительного станка для испытательного стенда малоразмерных газотурбинных двигателей | 2024 |
|
RU2819322C1 |
| ВСЕСОЮЗНАЯ I Г!'т;;п 'Т-'-'!.'"- с'^ч* !Л!1 о'/ • : !. »<;;. , , I >&^;V | 1973 |
|
SU366377A1 |
| СПОСОБ ИСПЫТАНИЙ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2003 |
|
RU2238533C1 |
| Стенд для измерения силы тяги реактивного двигателя | 1976 |
|
SU608066A1 |

Стенд для испытания турбореактивного двигателя /ТРД/ и для испытания двигателей с управляемым по направлению вектором тяги и/или испытания реверса тяги. Задачей изобретения является обеспечение измерений тяги по осям трехмерного пространства, в направлении действия измеряемых усилий, с заданной точностью. Предложен стенд для испытания двигателей с управляемым по направлению вектором тяги, у которого динамометрическая платформа выполнена с возможностью перемещения по трем осям координат, в направлении действия измеряемых усилий, при этом между опорной рамой и динамометрической платформой установлена опора силоприемная, закрепленная на опорной раме, на которой размещены три силоизмерительных модуля для измерения Rx - горизонтальной составляющей тяги, Ry - вертикальной составляющей тяги и Rz - боковой составляющей тяги и тарировки систем измерений. При этом силоизмерительные модули "Rx", "Ry", "Rz" снабжены системой предварительной загрузки модулей и системой возврата плат формы в нулевое положение и контроля линейных перемещений по оси "X". 5 з.п. ф-лы, 5 ил.
| СТЕНД ДЛЯ ИСПЫТАНИЯ РЕАКТИВНОГО ДВИГАТЕЛЯ | 1996 |
|
RU2117272C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ АВИАЦИОННЫХ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1988 |
|
SU1572195A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ПОВОРОТНЫМ ОСЕСИММЕТРИЧНЫМ РЕАКТИВНЫМ СОПЛОМ | 1998 |
|
RU2144658C1 |
| СПОСОБ ИСПЫТАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1995 |
|
RU2162593C2 |
| US 5230241 A, 27.07.1993 | |||
| US 5396793 A, 14.03.1995. | |||

