Изобретение относится к системам автоматического преобразования сигналов с датчиков перемещений индуктивного типа в частоту.
Целью изобретения является повышение то.чности преобразователя за счет повышения линейности и стабильности его передаточной характеристики.
На чертеже приведена функциональная схема предлагаемого преобразователя .
Преобразователь сигнала датчика перемещения в частоту содержит фильтр 1 низкой частоты, усилитель 2, преобразователь 3 переменного напряжения в постоянное, фазовый детектор 4, аналого-цифровой преобразователь 5, двоичный умножитель 6, генератор 7 импульсов, вход 8, частотный выход 9 и выход 10 индикации направления. Преобразователь сигнала датчика в унитарный код работает следующим образом.
Входной сигнал по входу 8 (от датчика перемещения) поступает на фильтр 1 низкой частоты, где производится выделение первой гармоники, которая затем усиливается усилите- лем 2. Гармонический сигнал с выхода усилителя 2 преобразуется в постоянное напряжение преобразователем 3, которое поступает на вход аналого- цифрового преобразователя 5. Двоичный код аналого-цифрового преобразо вателя 5, пропорциональный величине напряжения первой гармоники входного сигнала, управляет двоичным умножителем 6, на частотный вход которого поступают импульсы опорной частоты от генератора 7 импульсе. Выходной сигнал двоичного умножителя 6, поступающий на выход 9, пропорционален напряжению первой гармоники сигнала датчика перемещения. С помощью фазового детектора 4 формируется сигна направления перемещения на выходе 10,
Выходной сигнал 4 датчика перемещений индуктивного типа, например вращающегося трансформатора, работающего в амплитудном режиме, поступающий на вход 8, описывается выражением
,-
U
а ых
К(имсозЫ UBX xsinof- ) ,
где Ueux ,„
sinwt - напряжение на выходной обмотке датчика ;
Ю
р 5 я 20 25
-JQ ал
ю35
50
55
Uex COS e(
U6Xsinwt «
xcoso(
- напряжение на входе синусной обмотки датчика; UBXsinc UBX.
xsinwt-sind - напряжение на входе косинусной обмотки; К - коэффициент передачи датчика; а( - угол, задаваемый во входных напряжениях датчика; Lf- угол поворота ротора датчика относительно статора.
Согласно приведенного выражения выходное напряжение датчика представляет собой гармонический сигнал, амплитуда которого в перром приближении (при малых о - ц) пропорциональна о(- if, а фаза определяет направление поворота ротора. Часто на входные обмотки датчика подают импульсные напряжения, в которых только первые гармоники соответствуют приведенному выражению. В этом случае выходной сигнал датчика имеет сложный спектр, в котором информацию несет основная (первая) гармоника, которую выделяют фильтром 1 нижних частот.
Для практической реализации фазового детектора 4 необходимо вход опорного сигнала подключить к выходу источника опорного сигнала, подаваемого на вход датчика.
Формула изобретения
Преобразователь сигнала датчика перемещения в частоту, содержащий фильтр нижних частот, выход которого соединен с входом усилителя, а вход является входом преобразователя, отличающийся тем, что, с целью повышения точности преобразователя за счет повышения линейности и стабильности его передаточной характеристики, в него введены фазовый детектор, двоичный умножитель, генератор импульсов, аналого-цифровой преобразователь и преобразователь переменного напряжения в постоянное, выход усилителя соединен с входами
5 15506196
фазового детектора и преобразователяЛя, частотный вход которого подключен переменного напряжения в постоянное,к выходу генератора импульсов, а вы- выход которого соединен с входом ана-ход является частотным выходом прелого-цифрового преобразователя, вы-образователя, выход фазового детек- ходы которого соединены с информа-5 тора является выводом индикации на- ционными входами двоичного умножите-правления преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КАБЕЛЯ | 1991 |
|
RU2017331C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2005 |
|
RU2279094C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2009 |
|
RU2405160C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2000 |
|
RU2165625C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2006 |
|
RU2308038C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЙ | 2006 |
|
RU2325662C1 |
| Компенсационный акселерометр | 2016 |
|
RU2614205C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2118831C1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
Изобретение относится к системам автоматического преобразования сигналов датчиков перемещений индуктивного типа в частоту. Целью изобретения является повышение точности преобразователя за счет повышения линейности и стабильности его передаточной характеристики. Это достигается тем, что преобразователь сигнала датчика в частоту, содержит фильтр 1 низкой частоты, выход которого соединен с входом усилителя 2, на входе которого усиливается сигнал первой гармоники, выделенный фильтром 1 низкой частоты. Затем этот переменный сигнал преобразуется в постоянное напряжение преобразователем 3 переменного напряжения в постоянное, а с помощью фазового детектора 4 из этого сигнала формируется сигнал направления перемещения. С выхода преобразователя 3 сигнал подается на вход аналого-цифрового преобразователя 5, где преобразуется в цифровой параллельный код, подаваемый на информационные входы двоичного умножителя 6. На частотный вход двоичного умножителя 6 подается частота с генератора 7 импульсов. На выходе двоичного умножителя 6 формируется сигнал, частота которого изменяется в зависимости от состояния его информационных входов. 1 ил.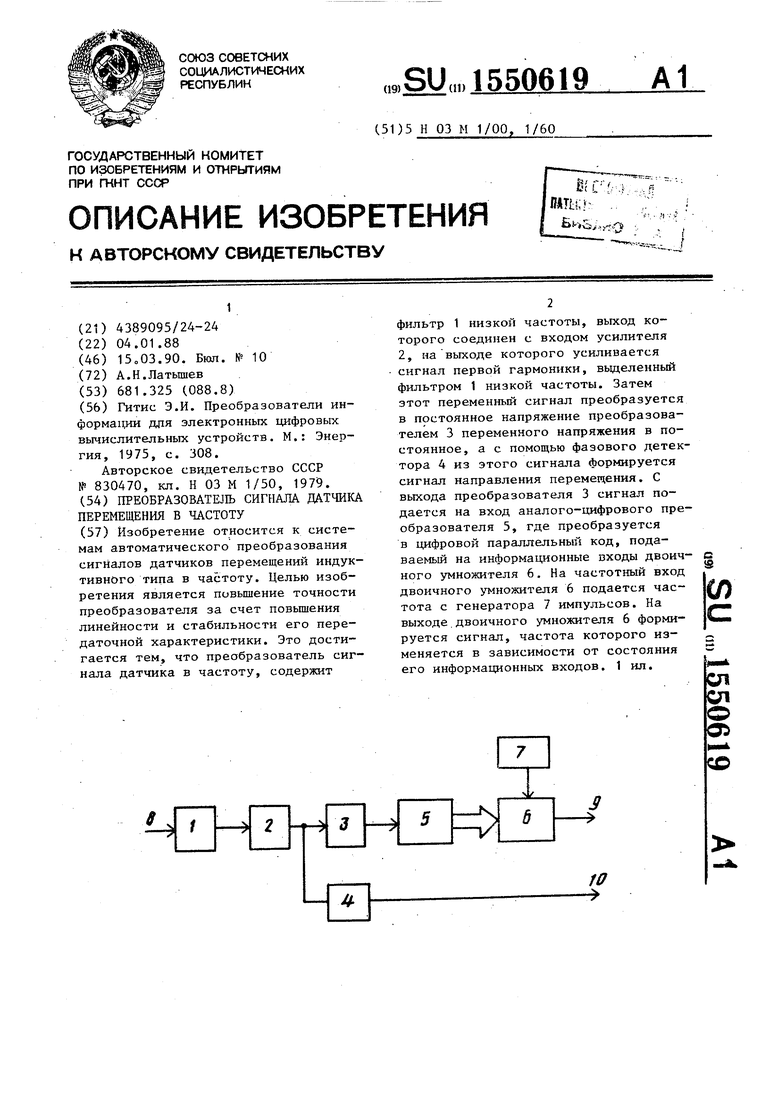
| Гитис Э.И | |||
| Преобразователи информации для электронных цифровых вычислительных устройств | |||
| М.: Энергия, 1975, с | |||
| Распределительный механизм для паровых машин | 1921 |
|
SU308A1 |
| Преобразователь сигнала датчикапЕРЕМЕщЕНия B уНиТАРНый КОд | 1979 |
|
SU830470A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
