Изобретение относится к области физической культуры и спорта и может найти применение при тренировке и контроле биомеханической подготовленности спортсменов преимущественно борцов, а также людей других специальностей и профессий, связанных с выполнением сложных двигательных программ.
Целью изобретения является повышение эффективности тренировки.
на ребрах станины 1
активности.
Устройство для тренировки спортсменов содержит станину 1 с направляющими 2-5, несущую шарнирно смонтированные взаимно перпендикулярные внутреннюю и внешнюю рамки 6 и 7, стержень 8 с блоком контакта 9 для спортсмена, установленный во внутренней рамке 6 перпендикулярно ее плоскости с возможностью возвратно- поступательного перемещения. Внутренняя
рои закреплены (фиг. 2).
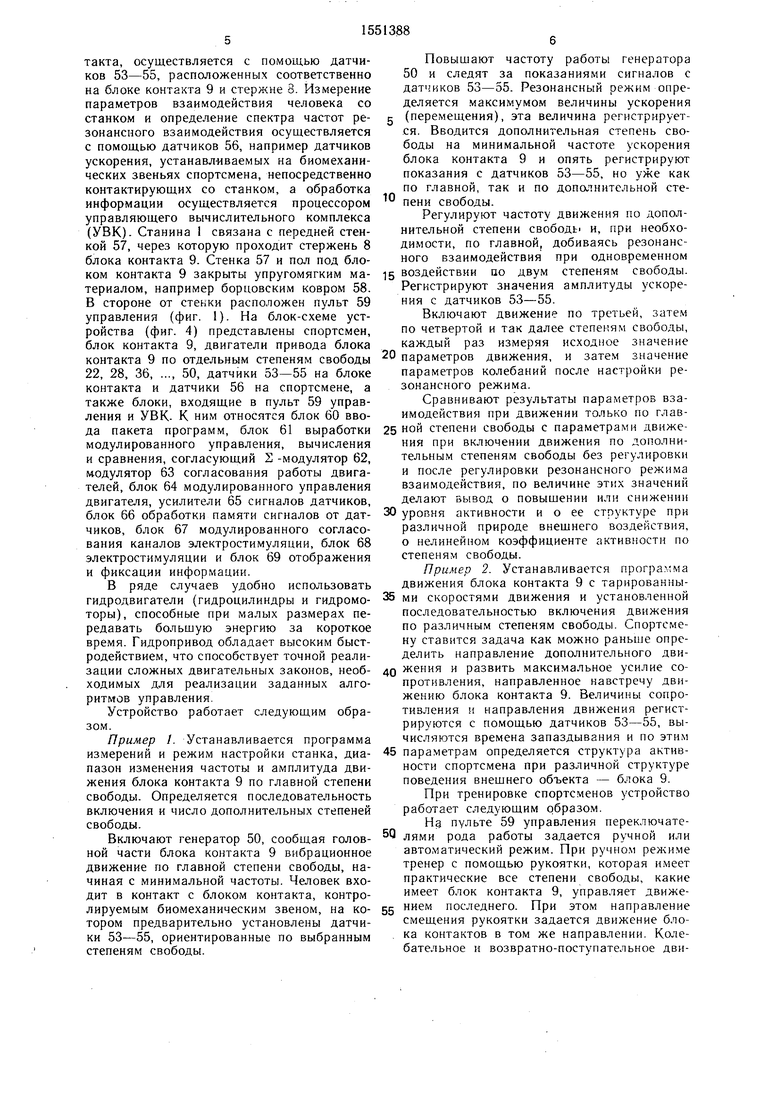
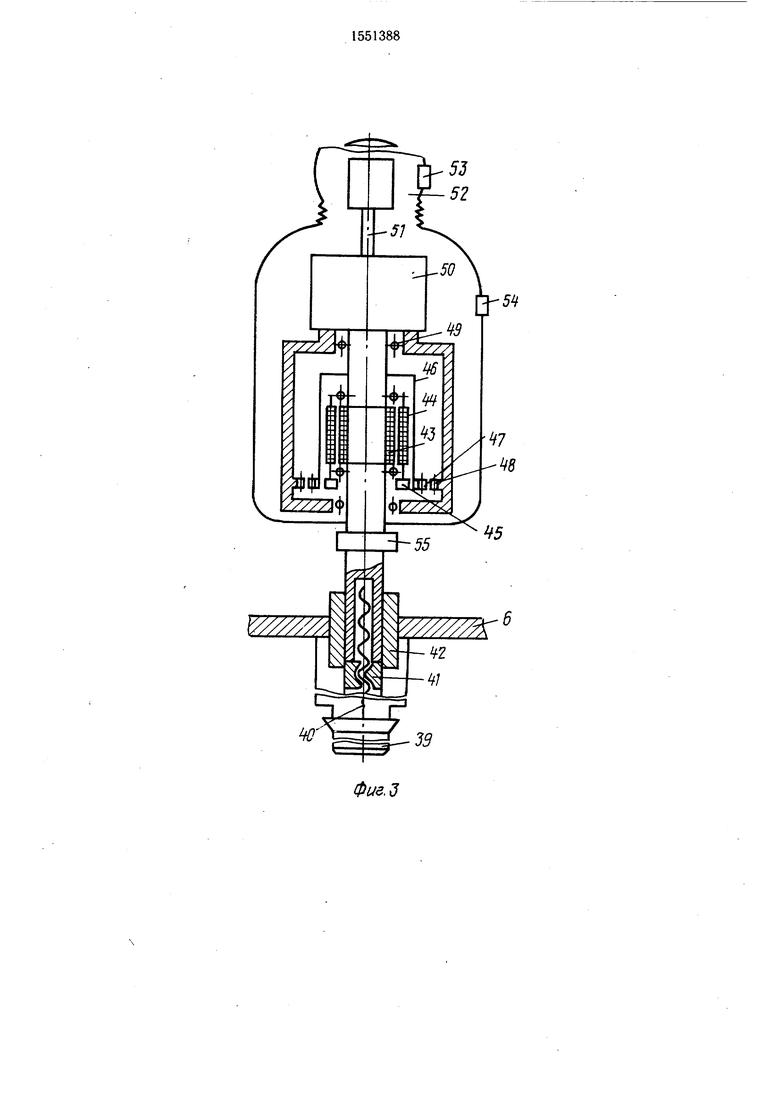
Привод поступательного перемещения стержня 8 с блоком контакта 9 распола- г гается на нижней стороне рамки 6 и состоит из двигателя 39, вал которого соединен, например, с ходовым винтом 40. Стержень 8 выполнен полым, а на конце его закреплена гайка 41 (фиг. 3).
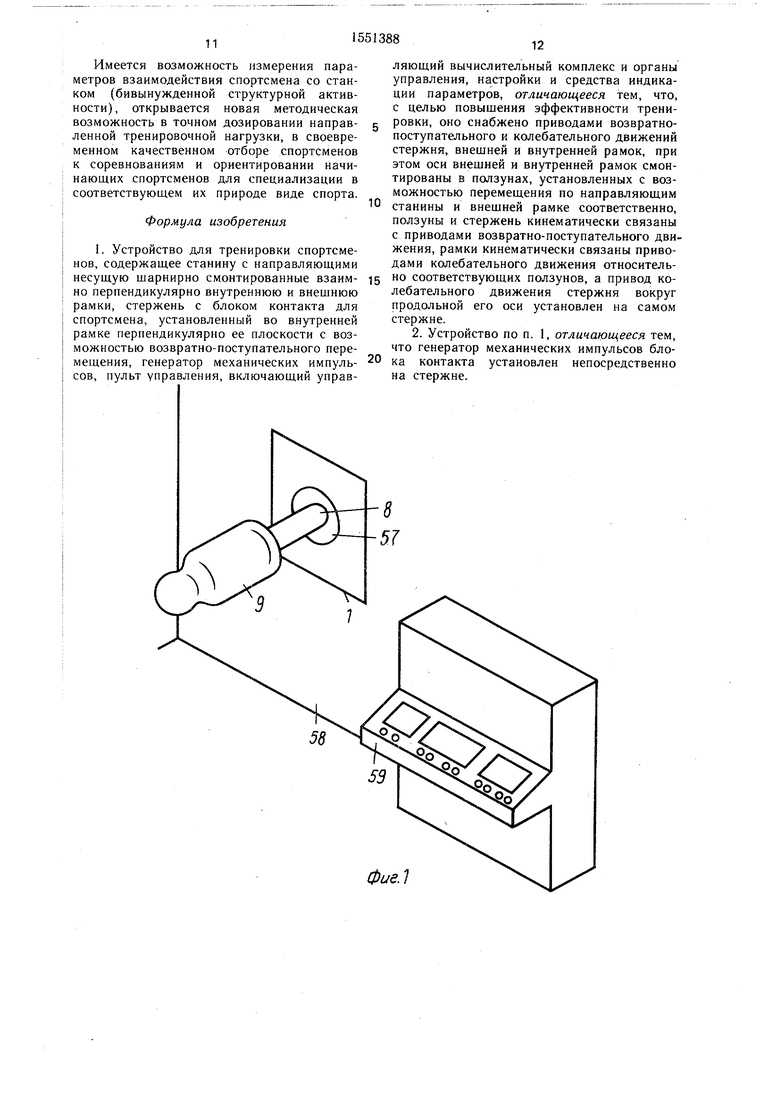
Стержень 8 для обеспечения поступаНа фиг. 1 изображено устройство, общий Ю тельного перемещения относительно рамки 6 вид; на фиг. 2 - то же, вид на привод воз- расположен в направляющем корпусе 42, вратно-поступательного и колебательного имеющем шлицы или шпонку, которая вхо- движений; на фиг. 3 - блок контакта, дит в паз на стержне 8 и исключает взаим- осевой разрез; на фиг. 4 - блок-схема уст- ный поворот стержня 8 относительно корпу- ройства управления тренировкой и контроля 15 са 42 и рамки 6.
Блок контакта 9 установлен на конце стержня 8 и может совершать колебательное движение вокруг оси стержня 8.
Привод колебательного движения осуществляется, например, с помощью двига- 2( теля, статор 43 которого жестко закреплен на стержне 8, а полый ротор 44 вращается на подшипниках, установленных на стержне 8. Ротор 44 может быть непосредственно связан с блоком контакта 9 или через прорамка 6 посредством полуосей 10 и 11 и 25 межуточный редуктор, например волновой подшипников 12 и 13 смонтированы на пол- (фиг. 3). зунах 14 и 15. Последние установлены с возможностью перемещения на направляющих 2 и 3, которые являются частью внешней рамки 7.
Рамка 7 с помощью полуосей 16 и 17 30 конце имеет зубчатый венец 47. В месте и подшипников 18 и 19 расположена в пол- контакта ролика 45 с гибким звеном 46 оно зунах 20 и 21. Последние установлены на деформируется и зубчатый венец 47 входит направляющих 5 и 4 с возможностью пере- в контакт с зубчатым колесом 48, соеди- мещения по ним. Направляющие 4 и 5 яв- ненным корпусом блока контакта 9 и рас- ляются неподвижными ребрами станины 1. положенным на стержне 8 с помощью под- Привод колебательного движения рамки 6 35 шипников 49.
Привод колебательных движений блока контакта 9 вокруг полуосей 10 и 11, 16 и 17, а также привод возвратно-поступательного движения по направляющим 2 и 3, 4 и 5
редуктора 23, двух стоек 25 и 26, установ- 40 одновременно обеспечивает перемещение ленных на рамке 6, и ленты 27, охватываю- блока контакта 9 в заданном направлении
на конечную величину, определяемую конструкцией устройства.
На конце корпуса зубчатого колеса 48 располагается вибрационный механизм, со- но-поступательного колебательного движе- 45 держащий жестко установленный генера- ния рамки 7 осуществляется от двигате- тор 50 колебаний и колеблющуюся часть,
которой может быть весь блок контакта или часть его, которая соединена стержнем 51 с генератором 50 колебаний
Блок контакта или его часть имеют воз- 5 можность совершать колебательные движения относительно стержня 8 вдоль его оси за счет установки упругой прослойки 52, окружающей стержень 51, и значительно большей массы стержня 8 со всеми уста- мещения наружной рамки 7 осуществляется g5 новленными на нем узлами по сравнению с помощью двигателя 36, расположенного с колеблющейся частью.
Измерение усилий, развиваемых спортсменом при взаимодействии с блоком конРотор 44 имеет один (два, три) свободно вращающийся ролик 45, опирающийся на гибкое звено 46, которое жестко закреплено одним концом на стержне 8, а на другом
вокруг полуосей 10 и 11 состоит из двигателя 22 с редуктором 23, расположенных на ползуне 15. шкива 24, установленного на валу двигателя или связанного с ним
щей шкив 24 и закрепленной на стойках 25 и 26. В случае применения пневмо- или гидроцилиндра концы ленты соединяются с поршнем или цилиндром. Привод возвратля 28, установленного на ползуне 14 или 15. Шкив 29 двигателя 28 охватывается лентой 30, концы которой закреплены на рамке 7.
На рамке 7 установлены стойки 31 и 32, к которым прикреплены концы ленты 33, охватывающей шкив 34, расположенный на валу двигателя 35.
Привод возвратно-поступательного перена ползуне 21 (или 20). Шкив 37 двигателя 36 охватывается лентой 38, концы котона ребрах станины 1
межуточный редуктор, например волновой (фиг. 3).
конце имеет зубчатый венец 47. В месте контакта ролика 45 с гибким звеном 46 оно деформируется и зубчатый венец 47 входит в контакт с зубчатым колесом 48, соеди- ненным корпусом блока контакта 9 и рас- положенным на стержне 8 с помощью под- шипников 49.
Ротор 44 имеет один (два, три) свободно вращающийся ролик 45, опирающийся на гибкое звено 46, которое жестко закреплено одним концом на стержне 8, а на другом
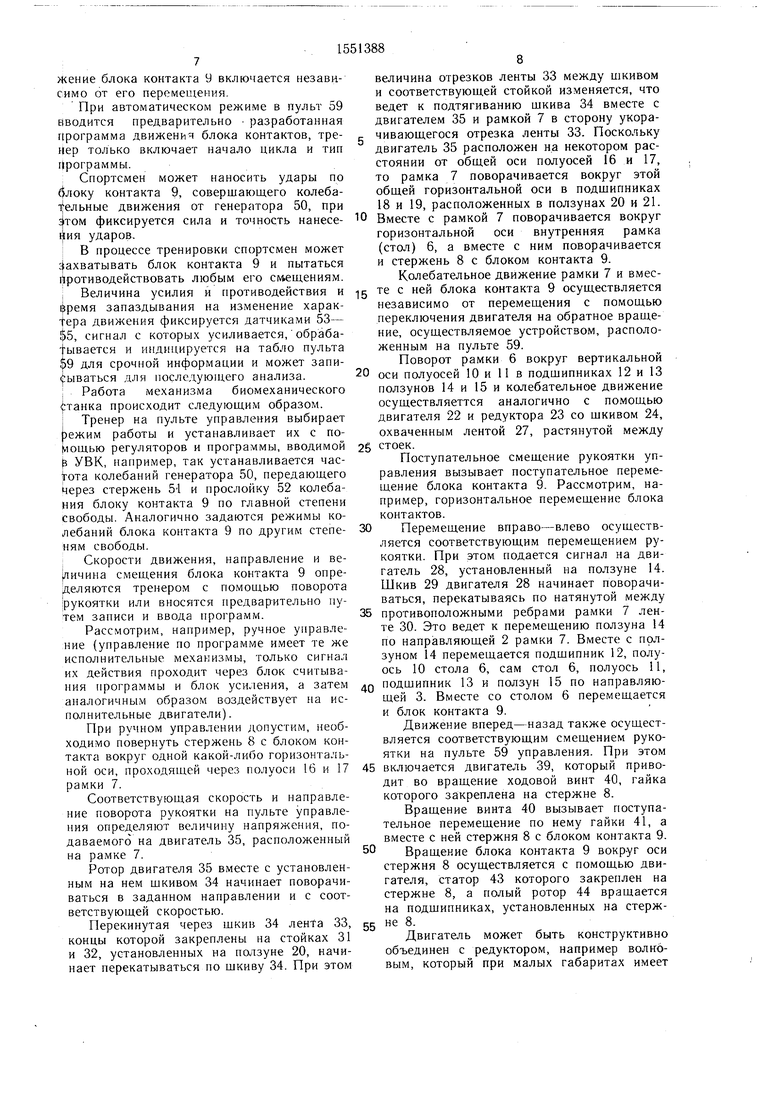
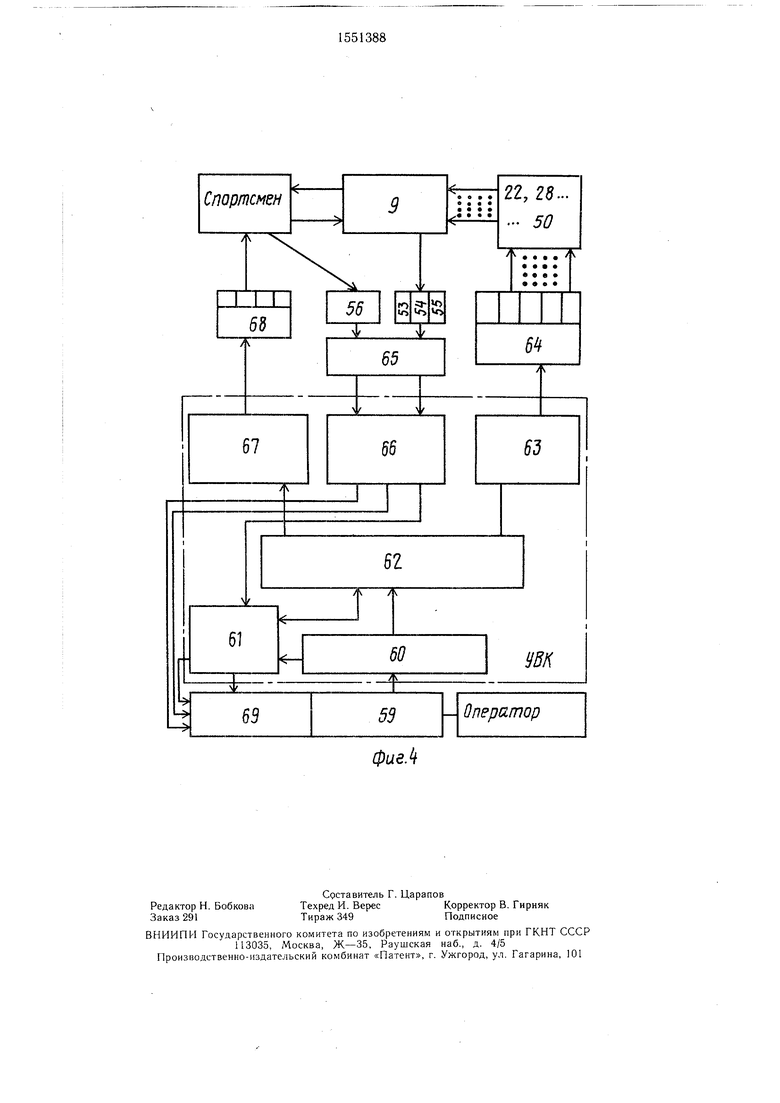
такта, осуществляется с помощью датчиков 53-55, расположенных соответственно на блоке контакта 9 и стержне 3. Измерение параметров взаимодействия человека со станком и определение спектра частот резонансного взаимодействия осуществляется с помощью датчиков 56, например датчиков ускорения, устанавливаемых на биомеханических звеньях спортсмена, непосредственно контактирующих со станком, а обработка
Повышают частоту работы генератора 50 и следят за показаниями сигналов с датчиков 53-55. Резонансный режим определяется максимумом величины ускорения 5 (перемещения), эта величина регистрируется. Вводится дополнительная степень свободы на минимальной частоте ускорения блока контакта 9 и опять регистрируют показания с датчиков 53-55, но уже как
.,„..,„к,.„...,„..., „,,„„„ по главной, так и по дополнительной стеинформации осуществляется процессором пени свободы, управляющего вычислительного комплексаРегулируют частоту движения по допол(УВК). Станина 1 связана с передней стен- нительной степени свободы и, при необхо- кой 57, через которую проходит стержень 8 димости, по главной, добиваясь резонанс- блока контакта 9. Стенка 57 и пол под бло- ного взаимодействия при одновременном ком контакта 9 закрыты упругомягким ма- 15 воздействии по двум степеням свободы.
Регистрируют значения амплитуды ускорения с датчиков 53-55.
Включают движение по третьей, затем по четвертой и так далее степеням свободы,
каждый раз измеряя исходное значение
контакта 9 по отдельным степеням свободы 20 параметров движения, и затем значение 22, 28, 36, ..., 50, датчики 53-55 на блоке параметров колебаний после настройки резонансного режима.
Сравнивают результаты параметров взаимодействия при движении только по главтериалом, например борцовским ковром 58. В стороне от стенки расположен пульт 59 управления (фиг. 1). На блок-схеме устройства (фиг. 4) представлены спортсмен, блок контакта 9, двигатели привода блока
контакта и датчики 56 на спортсмене, а также блоки, входящие в пульт 59 управления и УВК- К ним относятся блок 60 ввония при включении движения по дополнительным степеням свободы без регулировки и после регулировки резонансного режима взаимодействия, по величине этих значений делают вывод о повышении или снижении
да пакета программ, блок 61 выработки 25 ной степени свободы с параметрами движе- модулированного управления, вычисления и сравнения, согласующий S -модулятор 62, модулятор 63 согласования работы двигателей, блок 64 модулированного управления двигателя, усилители 65 сигналов датчиков, блок 66 обработки памяти сигналов от дат- 3° уровня активности и о ее структуре при чиков, блок 67 модулированного согласо- различной природе внешнего воздействия, вания каналов электростимуляции, блок 68 о нелинейном коэффициенте активности по электростимуляции и блок 69 отображения степеням свободы.
и фиксации информации.Пример 2. Устанавливается программа
В ряде случаев удобно использовать движения блока контакта 9 с тарированны- гидродвигатели (гидроцилиндры и гидромо- & ми скоростями движения и установленной торы), способные при малых размерах пе- последовательностью включения движения редавать большую энергию за короткое по различным степеням свободы. Спортсме- время. Гидропривод обладает высоким быст- ну ставится задача как можно раньше опре- родействием, что способствует точной реали- делить направление дополнительного дви- зации сложных двигательных законов, необ- 40 жения и развить максимальное усилие со- ходимых для реализации заданных алго- противления, направленное навстречу движению блока контакта 9. Величины сопротивления и направления движения регистрируются с помощью датчиков 53-55, вычисляются времена запаздывания и по этим
измерений и режим настройки станка, диа- 45 параметрам определяется структура актив- пазон изменения частоты и амплитуда дви- ности спортсмена при различной структуре
поведения внешнего объекта - блока 9.
При тренировке спортсменов устройство работает следующим образом.
„..На пульте 59 управления переключатеВключают генератор 50, сообщая голов- 5Q лями рода работы задается ручной или ной части блока контакта 9 вибрационное автоматический режим. При ручном режиме
тренер с помощью рукоятки, которая имеет практические все степени свободы, какие имеет блок контакта 9, управляет движеритмов управления.
Устройство работает следующим образом.
Пример 1. Устанавливается программа
жения блока контакта 9 по главной степени свободы. Определяется последовательность включения и число дополнительных степеней свободы.
движение по главной степени свободы, начиная с минимальной частоты. Человек входит в контакт с блоком контакта, контролируемым биомеханическим звеном, на ко-55 нием последнего. При этом направление тором предварительно установлены датчи-смещения рукоятки задается движение блоки 53-55, ориентированные по выбраннымка контактов в том же направлении. Коле- степеням свободы.бательное и возвратно-поступательное двиния при включении движения по дополнительным степеням свободы без регулировки и после регулировки резонансного режима взаимодействия, по величине этих значений делают вывод о повышении или снижении
ной степени свободы с параметрами движе- уровня активности и о ее структуре при различной природе внешнего воздействия, о нелинейном коэффициенте активности по степеням свободы.
Жение блока контакта 9 включается незави- величина отрезков ленты 33 между шкивом симо от его перемещенияи соответствующей стойкой изменяется, что
При автоматическом режиме в пулы 59 ведет к подтягиванию шкива 34 вместе с вводится предварительно разработанная двигателем 35 и рамкой 7 в сторону укора- программа движение блока контактов, тре- чивающегося отрезка ленты 33. Поскольку Пер только включает начало цикла и гип двигатель 35 расположен на некотором рас- Программы.стоянии от общей оси полуосей 16 и 17,
Спортсмен может наносить удары по то рамка 7 поворачивается вокруг этой б,локу контакта 9, совершающего колеба- общей горизонтальной оси в подшипниках дельные движения от генератора 50, при 18 и 19, расположенных в ползунах 20 и 21. 4том фиксируется сила и точность нанесе- 1 Вместе с рамкой 7 поворачивается вокруг ударов.горизонтальной оси внутренняя рамка
(стол) 6, а вместе с ним поворачивается и стержень 8 с блоком контакта 9.
Колебательное движение рамки 7 и вмесВеличина усилия и противодействия и 15 те с не блока контакта 9 осуществляется фремя запаздывания на изменение харак- независимо от перемещения с помощью
переключения двигателя на обратное вращение, осуществляемое устройством, расположенным на пульте 59.
Поворот рамки 6 вокруг вертикальной 20 оси полуосей 10 и 11 в подшипниках 12 и 13 ползунов 14 и 15 и колебательное движение осуществляеттся аналогично с помощью двигателя 22 и редуктора 23 со шкивом 24, охваченным лентой 27, растянутой между
В процессе тренировки спортсмен может Захватывать блок контакта 9 и пытаться противодействовать любым его смещениям.
tepa движения фиксируется датчиками 53- $5, сигнал с которых усиливается, обрабатывается и индицируется на табло пульта $9 для срочной информации и может запи- ываться для последующего анализа.
Работа механизма биомеханического {гтанка происходит следующим образом.
Тренер на пульте управления выбирает ежим работы и устанавливает их с поI
(мощью регуляторов и программы, вводимой 2S ст°ек.
Ј УВК, например, так устанавливается частота колебаний генератора 50, передающего через стержень 51 и прослойку 52 колебания блоку контакта 9 по главной степени свободы Аналогично задаются режимы колебаний блока контакта 9 по другим степе- 30 ням свободы.
Скорости движения, направление и величина смещения блока контакта 9 определяются тренером с помощью поворота рукоятки или вносятся предварительно путем записи и ввода программ.
Рассмотрим, например, ручное управление (управление по программе имеет те же исполнительные механизмы, только сигнал их действия проходит через блок счигываПоступательное смещение рукоятки управления вызывает поступательное перемещение блока контакта 9. Рассмотрим, например, горизонтальное перемещение блока контактов.
Перемещение вправо-влево осуществляется соответствующим перемещением рукоятки. При этом подается сигнал на двигатель 28, установленный на ползуне 14. Шкив 29 двигателя 28 начинает поворачиваться, перекатываясь по натянутой между 35 противоположными ребрами рамки 7 ленте 30. Это ведет к перемещению ползуна 14 по направляющей 2 рамки 7. Вместе с ползуном 14 перемещается подшипник 12, полуось 10 стола 6, сам стол 6, полуось 11,
ния программы и блок усиления, а затем о подшипник 13 и ползун 15 по направляю- аналогичным образом воздействует на ис- щей 3. Вместе со столом 6 перемещается
и блок контакта 9.
Движение вперед-назад также осуществляется соответствующим смещением рукоятки на пульте 59 управления. При этом
ной оси, проходящей через полуоси 16 и 17 45 включается двигатель 39, который приво- рамки 7.дит во вращение ходовой винт 40, гайка
которого закреплена на стержне 8.
Вращение винта 40 вызывает поступательное перемещение по нему гайки 41, а вместе с ней стержня 8 с блоком контакта 9. Вращение блока контакта 9 вокруг оси
полнительные двигатели).
При ручном управлении допустим, необходимо повернуть стержень 8 с блоком контакта вокруг одной какой-либо горизонталь50
Соответствующая скорость и направление поворота рукоятки на пульте управления определяют величину напряжения, подаваемого на двигатель 35, расположенный на рамке 7.
Ротор двигателя 35 вместе с установленным на нем шкивом 34 начинает поворачиваться в заданном направлении и с соответствующей скоростью.
Перекинутая через шкив 34 лента 33, 55 концы которой закреплены на стойках 31 и 32, установленных на ползуне 20, начинает перекатываться по шкиву 34. При этом
стержня 8 осуществляется с помощью двигателя, статор 43 которого закреплен на стержне 8, а полый ротор 44 вращается на подшипниках, установленных на стержне 8.
Двигатель может быть конструктивно объединен с редуктором, например волновым, который при малых габаритах имеет
ст°ек.
Поступательное смещение рукоятки управления вызывает поступательное перемещение блока контакта 9. Рассмотрим, например, горизонтальное перемещение блока контактов.
Перемещение вправо-влево осуществляется соответствующим перемещением рукоятки. При этом подается сигнал на двигатель 28, установленный на ползуне 14. Шкив 29 двигателя 28 начинает поворачиваться, перекатываясь по натянутой между противоположными ребрами рамки 7 ленте 30. Это ведет к перемещению ползуна 14 по направляющей 2 рамки 7. Вместе с ползуном 14 перемещается подшипник 12, полуось 10 стола 6, сам стол 6, полуось 11,
Вращение винта 40 вызывает поступательное перемещение по нему гайки 41, а вместе с ней стержня 8 с блоком контакта 9. Вращение блока контакта 9 вокруг оси
стержня 8 осуществляется с помощью двигателя, статор 43 которого закреплен на стержне 8, а полый ротор 44 вращается на подшипниках, установленных на стержне 8.
Двигатель может быть конструктивно объединен с редуктором, например волновым, который при малых габаритах имеет
большой коэффициент редукции. Редуктор содержит эксцентрично установленные на роторе 44 ролики 45, которые катятся по гибкому цилиндру 46. Один конец цилиндра 46 жестко закреплен на стержне 8, а на втором конце выполнен наружный зубчатый венец 47. Над последним расположен внутренний венец, который на подшипниках 49 установлен с возможностью вращения на стержне 8.
При недеформированном цилиндре 46 зубчатый венец 47 не зацепляется с колесом 48. Если же ролик 45 деформирует цилиндр 46, то венцы входят в местное зацепление и при вращении ротора 44, вследствие разности числа зубьев на венцах, за каждый оборот ротора 44 зубчатый венец поворачивается на некоторый угол вокруг оси стержня 8. Изменение направления движения вращения ротора 44 изменяет и направление поворота корпуса венца.
Вместе с венцом поворачивается установленный на нем генератор 50 колебаний и соответственно блок контакта 9.
Работу устройства в автоматизированном режиме проследим на примере измерения модулированной и вынужденной активности биомеханических цепей спортсмена. Оператор, производящий измерение, вводит выбранную программу измерения в блок памяти 60 и объясняет спортсмену его действия. Существо бивынужденной активно - ти состоит в задействовании сначала одно- канального возбуждения с помощью последовательного включения двигателей приводов по степеням свободы, добиваясь после каждого дополнительного включения устойчивого режима взаимодействия со станком. Затем подключают второй канал вынуждающего воздействия на спортсмена с помощью блока модулированной электростимуляции, добиваясь после включения каждого из каналов электростимуляции устойчивых режимов бивынужденных взаимодействий спортсмена со станком. Затем подключают второй канал вынуждающего действия на спортсмена с помощью блока модулированной электростимуляции, добиваясь после включения каждого из каналов электростимуляции устойчивых режимов бивынужденно- го взаимодействия спортсмена со станком. Рассчитывая и реализуя с помощью согласующего модулятора работу первого и второго каналов воздействия, добиваются устойчивого максимального бивынужденного, в том числе резонансного, эффекта взаимодействия человека со станком, данные о котором через датчики и усилители, поступая в блок обработки, позволяют измерять величины и параметры модулированной бивынужденной активности спортсмена. Из блока 60 ввода пакета программ передается
0
5
0
5
0
5
0
5
0
5
в блок 62 информация о критериях для сравнения, а в блок 61 информация, необходимая для выработки управлений о получении бивынужденных режимов воздействия спортсмена со станком, которые необходимо измерять. Согласующий модулятор 62 организует согласованную работу двигателей и блока 67 согласования каналов электростимуляции. Модулятор 63 согласования ра боты двигателей подает модулированные и согласованные сигналы на блок 64, осуществляющий управление двигателями приводов по каждой степени свободы блока контактов 9.
В режиме двухканального бивынужденного взаимодействия спортсмена со станком одновременно с непосредственным двигательным воздействием через модулированно подвижный блок контакта 9 на активные звенья спортсмена подают согласованные в блоке 62 и сформированные в блоке 67 сигналы электростимуляции.
Таким образом, спортсмен приводится в состояние бивынужденной (по двигательному и электростимуляционному каналам) активности, -которая измеряется с помощью датчиков 53-56, усилителей 65, блока 66 / обработки и памяти. Из блока 66 информация передается в блок 61 для вычисления, сравнения и реализации подстройки станка для осуществления устойчивости, а, значит, и точности измерения достигнутого уровня модулированной бивынужденной биомеханической активности спртсмена.
Подстройка станка по программе (самонастройка), осуществляемая -с помощью блока 61, минимизирующая различные флуктуации (паразитные), обеспечивает существенное повышение точности измерения полезных сигналов.
Спортсмен, взаимодействуя с блоком контакта 9, вырабатывает в своем биомеханическом аппарате структуры, реализующие исполнительные движения. При этом широкая вариативность задания направления, скоростей перемещения блока контакта выделяемых энергии и мощности, вырабатывает у спортсмена чувство соперника или среды, т. е. реакцию на любые изменения движения блока контакта, т. е. соперника или среды. Такая тренировка расширяет адаптационные свойства биомеханического аппарата спортсмена. Спортсмен получает возможность наносить удары, воспринимать нагрузку, создавать противодействие в любой момент времени и из любого положения. Особенно важно, что спортсмен должен реализовать различную структуру противодействия движению блока контакта 9, включая медленные статические усилия и импульсные ударные и удароподобные движения. Сочетания этих движений и их взаимные переходы оказывают интенсивное адаптирующее действие на спортсмена.
Имеется возможность измерения параметров взаимодействия спортсмена со станком (бивынужденной структурной активности), открывается новая методическая возможность в точном дозировании направленной тренировочной нагрузки, в своевременном качественном отборе спортсменов к соревнованиям и ориентировании начинающих спортсменов для специализации в соответствующем их природе виде спорта.
Формула изобретения
I. Устройство для тренировки спортсменов, содержащее станину с направляющими несущую шарнирно смонтированные взаимно перпендикулярно внутреннюю и внешнюю рамки, стержень с блоком контакта для спортсмена, установленный во внутренней рамке перпендикулярно ее плоскости с возможностью возвратно-поступательного перемещения, генератор механических импульсов, пульт управления, включающий управляющий вычислительный комплекс и органы управления, настройки и средства индикации параметров, отличающееся тем, что, с целью повышения эффективности тренировки, оно снабжено приводами возвратно- поступательного к колебательного движений стержня, внешней и внутренней рамок, при этом оси внешней и внутренней рамок смонтированы в ползунах, установленных с возможностью перемещения по направляющим
станины и внешней рамке соответственно, ползуны и стержень кинематически связаны с приводами возвратно-поступательного движения, рамки кинематически связаны приводами колебательного движения относитель5 но соответствующих ползунов, а привод колебательного движения стержня вокруг продольной его оси установлен на самом стержне.
2. Устройство по п. 1, отличающееся тем, что генератор механических импульсов бло0 ка контакта установлен непосредственно на стержне.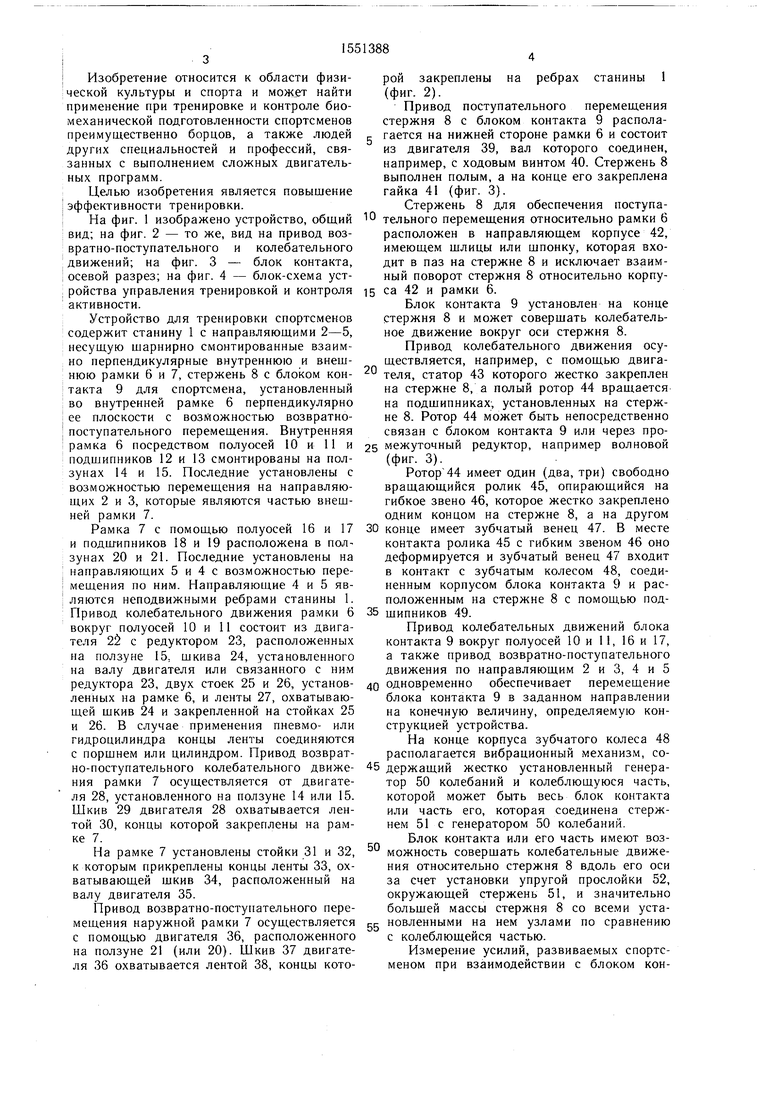
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки спортсменов | 1980 |
|
SU963532A1 |
| Биомеханическое устройство для тренировки тяжелоатлетов | 1988 |
|
SU1567225A1 |
| Устройство для тренировки спортсменов | 1983 |
|
SU1319875A1 |
| Устройство для тренировки спортсменов | 1977 |
|
SU738627A1 |
| Устройство для тренировки | 1990 |
|
SU1734792A1 |
| Устройство для тренировки | 1975 |
|
SU736989A1 |
| Устройство для тренировки спортсменов | 1983 |
|
SU1248621A1 |
| М. Кл. А,63Ь 69/00 | 1972 |
|
SU429823A1 |
| Устройство для тренировки спортсменов | 1979 |
|
SU931203A1 |
| Устройство для тренировки | 1980 |
|
SU961710A1 |
Изобретение относится к физической культуре и спорту и позволяет повысить интенсивность и эффективность тренировки. Устройство содержит станину 1, несущую стержень 8 с блоком контакта 9 для спортсмена. Стержень 8 установлен на внутренней рамке 6. Полуоси 10 и 11 внутренней рамки 6 смонтированы на ползунах 14 и 15. Ползуны 14 и 15 установлены на направляющих 2 и 3. Направляющие 2 и 3 закреплены на внешней рамке 7. Последняя с помощью полуосей 16 и 17 смонтирована на ползунах 20 и 21. Ползуны установлены на направляющих 4 и 5 станины 1. Устройство снабжено приводами возвратно-поступательного и колебательного движений стержня 8, рамок 6 и 7. На стержне 8 установлен генератор механических импульсов блока контакта 9. С пульта управления задается ручной или автоматический режим перемещения блока контакта 9. Спортсмен наносит удары по блоку контакта 9. Сила и точность ударов, изменение характера движения блока 9 фиксируются датчиками. Сигналы с датчиков поступают в блок обработки для получения на выходе параметров бивынужденной активности спортсмена. 1 з.п.ф-лы, 4 ил.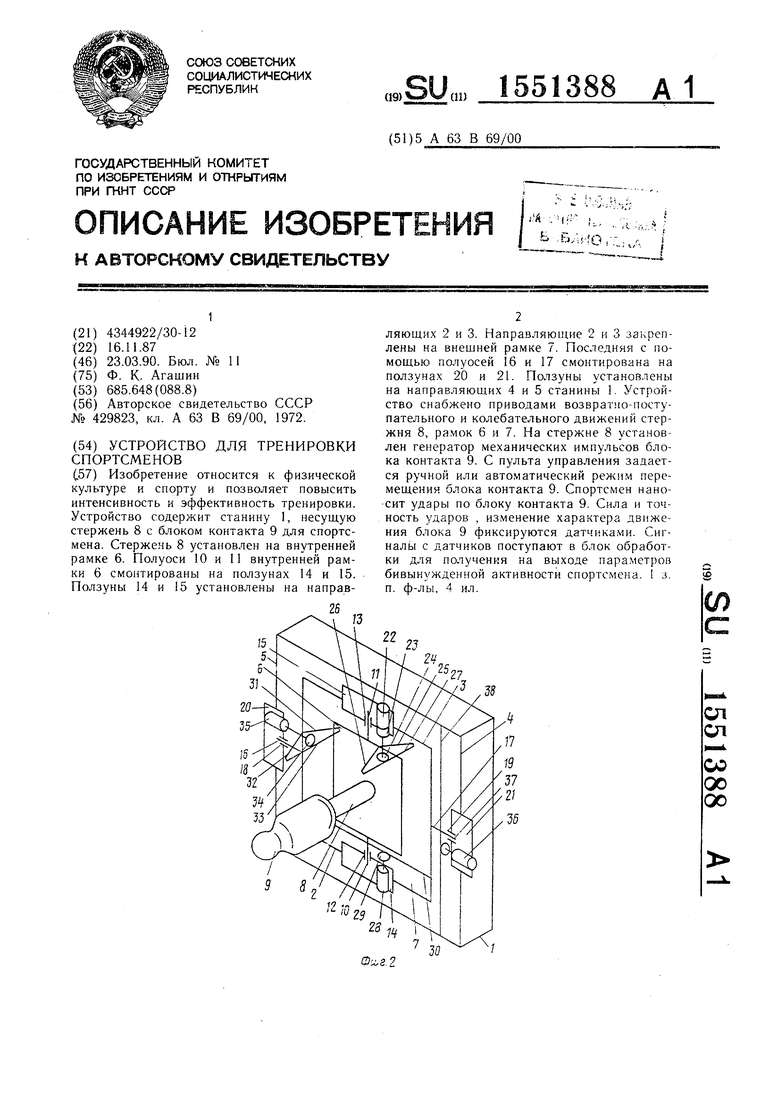
фиг. 1
w
у/////// ь
зэ
Фиг.З
фиеЛ
| М. Кл. А,63Ь 69/00 | 1972 |
|
SU429823A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
