СЛ СП
00
vj
1C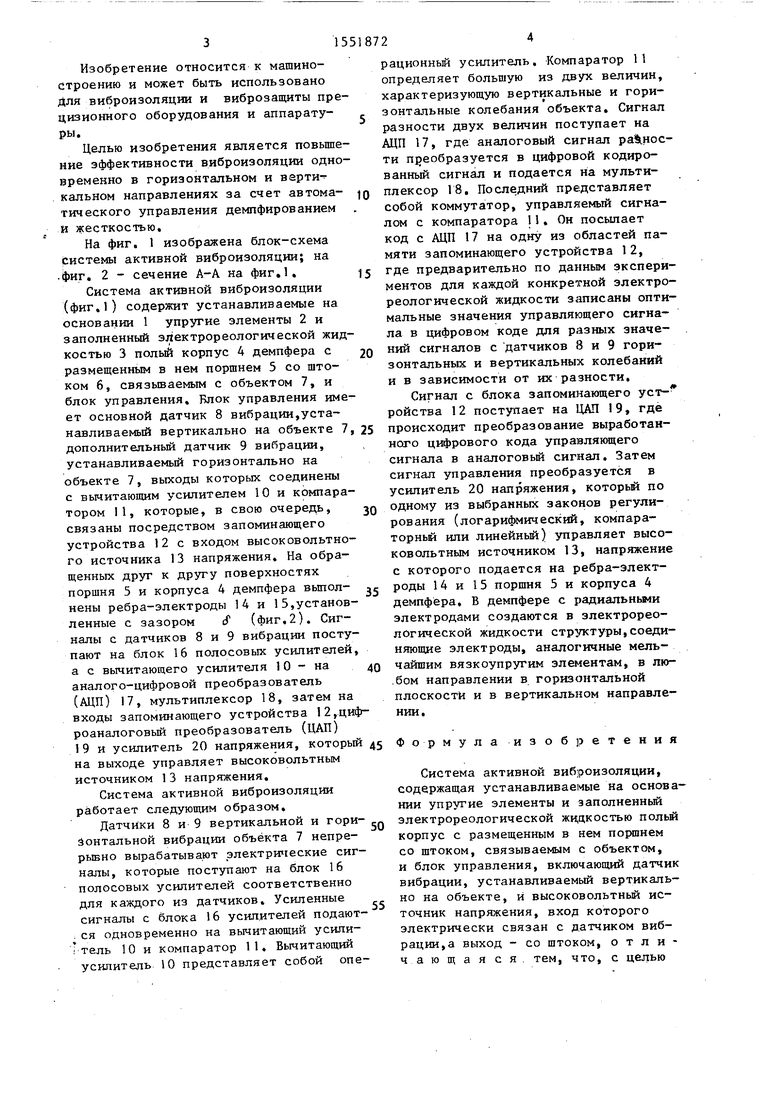
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА И СПОСОБ НАСТРОЙКИ ОПТИМАЛЬНОГО РЕЖИМА ЕЁ РАБОТЫ | 2020 |
|
RU2744257C1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ И ЭЛЕКТРОСТАТИЧЕСКИЙ ДЕМПФЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2656232C1 |
| МАГНИТОЭЛАСТИЧНЫЙ УПРАВЛЯЕМЫЙ ДЕМПФЕР | 2018 |
|
RU2698595C1 |
| Система управления вибростендом | 1986 |
|
SU1368863A1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ | 2017 |
|
RU2653929C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ КОЧЕТОВА | 2016 |
|
RU2627042C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ КОЧЕТОВА С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЕМПФИРОВАНИЯ | 2016 |
|
RU2627172C1 |
| РЕНТГЕНОГРАФИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕДИЦИНСКОЙ ДИАГНОСТИКИ | 2003 |
|
RU2233117C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ С ПЕРЕМЕННОЙ СТРУКТУРОЙ ДЕМПФИРОВАНИЯ | 2017 |
|
RU2653420C1 |
Изобретение относится к машиностроению и может быть использовано для виброизоляции и виброзащиты прецизионного оборудования и аппаратуры. Целью изобретения является повышение эффективности виброизоляции одновременно в горизонтальном и вертикальном направлениях за счет автоматического управления демпфированием и жесткостью. Датчики 8 и 9 вертикальной и горизонтальной вибрации объекта 7 непрерывно вырабатывают электрические сигналы, которые подаются на вычитающий усилитель 10 и компаратор 11. Сигнал разности двух величин поступает на одну из областей памяти запоминающего устройства 12, где по данным экспериментов предварительно для данной электрореологической жидкости записаны оптимальные значения управляющего сигнала, и на усилитель 20 напряжения, который по одному из выбранных оптимальных законов регулирования управляет высоковольтным источником 13, напряжение с которого подается на ребра - электроды поршня 5 и корпуса 4 демпфера. 2 ил.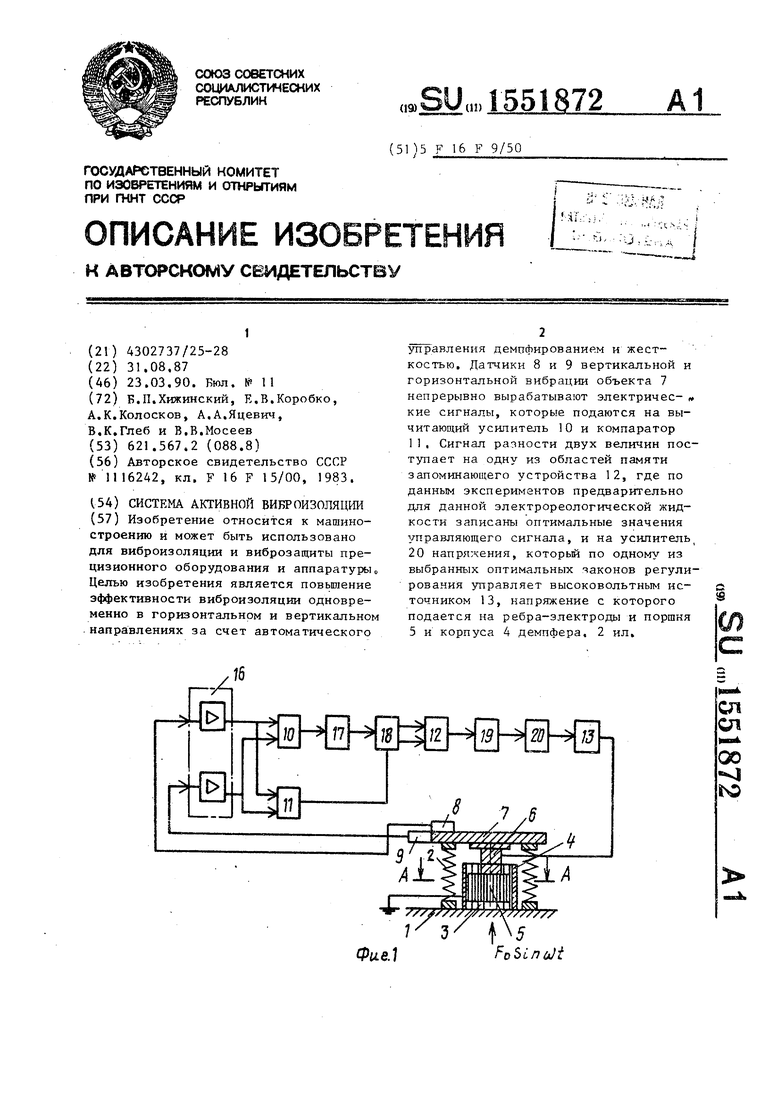
Фие.1
1 Ъ 5
FoSLndt
Изобретение относится к машиностроению и может быть использовано для виброизоляции и виброзащиты прецизионного оборудования и аппарату- ры.
Целью изобретения является повышение эффективности виброизоляции одновременно в горизонтальном и вертикальном направлениях за счет автома- тического управления демпфированием и жесткостью.
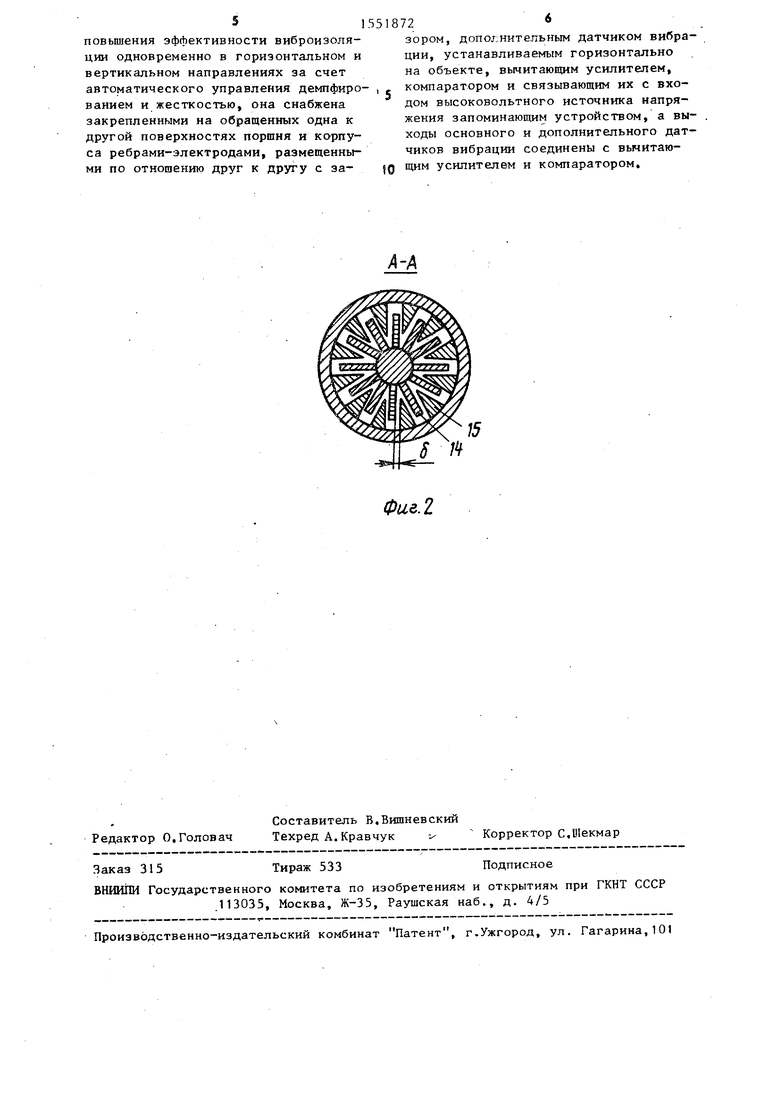
На фиг. 1 изображена блок-схема системы активной виброиэоляции; на фиг. 2 - сечение А-А на фиг.1.
Система активной виброиэоляции (фиг.1) содержит устанавливаемые на основании 1 упругие элементы 2 и заполненный электрореологической жидкостью 3 полый корпус 4 демпфера с размещенным в нем поршнем 5 со штоком 6, связываемым с объектом 7, и блок управления. Клок управления имеет основной датчик 8 вибрации,устанавливаемый вертикально на объекте 7, дополнительный датчик 9 вибрации, устанавливаемый горизонтально на объекте 7, выходы которых соединены с вычитающим усилителем 10 и компаратором 11, которые, в свою очередь, связаны посредством запоминающего устройства 12 с входом высоковольтного источника 13 напряжения. На обращенных друг к другу поверхностях поршня 5 и корпуса 4 демпфера выпол- нены ребра-электроды 14 и .установленные с зазором сГ (фиг,2). Сигналы с датчиков 8 и 9 вибрации поступают на блок 16 полосовых усилителей, а с вычитающего усилителя 10 - на
аналого-цифровой преобразователь (АЦП) 17, мультиплексор 18, затем на входы запоминающего устройства 12,циф роаналоговый преобразователь (ЦАП) 19 и усилитель 20 напряжения, который на выходе управляет высоковольтным источником 13 напряжения.
Система активной виброизоляции работает следующим образом.
Датчики 8 и 9 вертикальной и гори- зонтальной вибрации объекта 7 непрерывно вырабатывают электрические сигналы, которые поступают на блок 16 полосовых усилителей соответственно для каждого из датчиков. Усиленные сигналы с блока 16 усилителей подаются одновременно на вычитающий усили- тель 10 и компаратор 11. Вычитающий усилитель 10 представляет собой опе
о
5
5
рационньй усилитель. Компаратор 11 определяет большую из двух величин, характеризующую вертикальные и горизонтальные колебания объекта. Сигнал разности двух величин поступает на АЦП I7, где аналоговый сигнал ти преобразуется в цифровой кодированный сигнал и подается на мультиплексор 18. Последний представляет собой коммутатор, управляемый сигналом с компаратора 11. Он посылает код с АЦП 17 на одну из областей памяти запоминающего устройства 12, где предварительно по данным экспериментов для каждой конкретной электрореологической жидкости записаны оптимальные значения управляющего сигнала в цифровом коде для разных значений сигналов с датчиков 8 и 9 горизонтальных и вертикальных колебаний и в зависимости от их разности.
Сигнал с блока запоминающего уст- ройства 12 поступает на ЦАП 19, где происходит преобразование выработанного цифрового кода управляющего сигнала в аналоговый сигнал. Затем сигнал управления преобразуется в усилитель 20 напряжения, который по одному из выбранных законов регулирования (логарифмический, компара- торньй или линейный) управляет высоковольтным источником 13, напряжение с которого подается на ребра-электроды 14 и 15 поршня 5 и корпуса 4 демпфера. В демпфере с радиальными электродами создаются в электрореологической жидкости структуры,соединяющие электроды, аналогичные мельчайшим вязкоупругим элементам, в любом направлении в горизонтальной плоскости и в вертикальном направлении.
Формула изобретения
Система активной виброизоляции, содержащая устанавливаемые на основании упругие элементы и заполненный электрореологической жидкостью полый корпус с размещенным в нем поршнем со штоком, связываемым с объектом, и блок управления, включающий датчик вибрации, устанавливаемый вертикально на объекте, и высоковольтный источник напряжения, вход которого электрически связан с датчиком вибрации, а выход - со штоком, отличающаяся тем, что, с целью
51
повышения эффективности виброизоляции одновременно в горизонтальном и вертикальном направлениях за счет автоматического управления демпфированием и жесткостью, она снабжена закрепленными на обращенных одна к другой поверхностях поршня и корпуса ребрами-электродами, размещенными по отношению друг к другу с за51872
эором, допо.г нитепьным датчиком вибрации, устанавливаемым горизонтально на объекте, вычитающим усилителем, компаратором и связывающим их с входом высоковольтного источника напряжения запоминающим устройством, а выходы основного и дополнительного датчиков вибрации соединены с вычитаю- jg щнм усилителем и компаратором.
1 5
Фиг. 2
| Способ регулирования упругих характеристик системы | 1981 |
|
SU1116242A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
