Изобретение относится к области машиностроения, в частности к защите от колебаний и вибраций и может быть использовано в виброзащитной и приборной технике, в нано и космических технологиях, где необходимо в автоматическом режиме контролировать и поддерживать минимальный уровень вибраций научных и технических объектов, используемых в различных областях техники. Например, в местах максимальных колебаний-пучностях 1-го, 2-го, 3-его тона изгибных колебаний крыла, фюзеляжа самолета, корпуса ракеты.
Известна активная опора, содержащая полый корпус и основание, соленоид, расположенный в полости корпуса, сердечник, расположенный в полости соленоида сопряженный с основанием, а также мембрану из упругого магнитореологического материала, закрепленную по периметру на корпусе с расположением внутренней поверхности с зазором относительно сердечника. Корпус, основание и сердечник изготавливаются из магнитного материала. (Патент РФ на изобретение №2404380 «Управляемая опора», F16F 9/53, 2009 г.).
Недостатком данного устройства является использование мембраны, установленной с заданным зазором относительно корпусов катушек и соленоида. Мембрана перемещается в пределах незначительного зазора -показано на рисунках; мембрана принимает на небольшом радиусе по центру сферическую форму т.е. происходит перемещение опорной детали на незначительное расстояние. В случае возникновения колебаний (вибраций) со значительными амплитудами и ускорениями, т.е. на резонансных режимах отсутствует возможность эффективного гашения таких колебаний.
Предложенное в аналоге активное противофазное гашение в широком и высокочастотном режиме колебаний в магнитоэластичных и резиноподобных материалах эластомерах является затруднительным из-за медленного возвращения в равновесное состояние (по сравнению с металлами) в особенности при высокочастотных режимах колебаний.
Наиболее близким является устройство с управляемой опорой с использованием упругого элемента магнитореологического материала и обладающей возможностью активного позиционирования в автоматическом режиме в противофазе внешним возмущающим колебаниям с минимальным временем переходных процессов с обеспечением активного демпфирования, регулировки и стабилизации ускорения объекта, а также возможности перемещения объекта в заданном направлении с увеличенным диапазоном значений. (Патент РФ на изобретение №2611691. «Активная виброизолирующая платформа на основе магнитореологических эластомеров», F16f 15/05, 2015 г.).
Недостатком данного устройства является его громоздкость: использование соленоидов, сердечников и установки мембран с зазором относительно сердечника; также необходимость создания узлов активной подвески, содержащей массовые корректоры, шарниры «вал-втулка» или упругие шарниры в виде плоской пружины, маятники, несущие цилиндрические пружины с возможностью регулировки их предварительного натяжения, плоские пружины и конические опоры для вывешивания объекта. Кроме того, противофазное гашение требует весьма точной настройки и отслеживания фаз колебаний. Цель, на которую направлено заявляемое изобретение заключается в расширении частотного диапазона демпфирования колебаний, в упрощении и облегчении конструкции устройства.
Решение, на которое направлено заявляемое изобретение, заключается в расширении диапазона демпфирования не путем противофазного гашения колебаний или вибраций, а с помощью изменения упруго-жесткостных характеристик опоры, для смещения или увода резонансных колебаний в область низких или высоких частот относительно рабочих частотных режимов виброгасимого объекта.
Сущность изобретения заключается в создании отдельной опоры или системы связанных в автоматическом режиме опор с активной виброизоляцией, позволяющей по измеренным вибрациям (например, виброускорениям) на демпфируемом изделии, с помощью обратной связи производить в моменты их роста изменение или перестройку упруго-жесткостных параметров опоры, создавая автоматический увод от возрастающих вибраций и возникающих резонансных режимов на рабочих частотах машины (изделия).
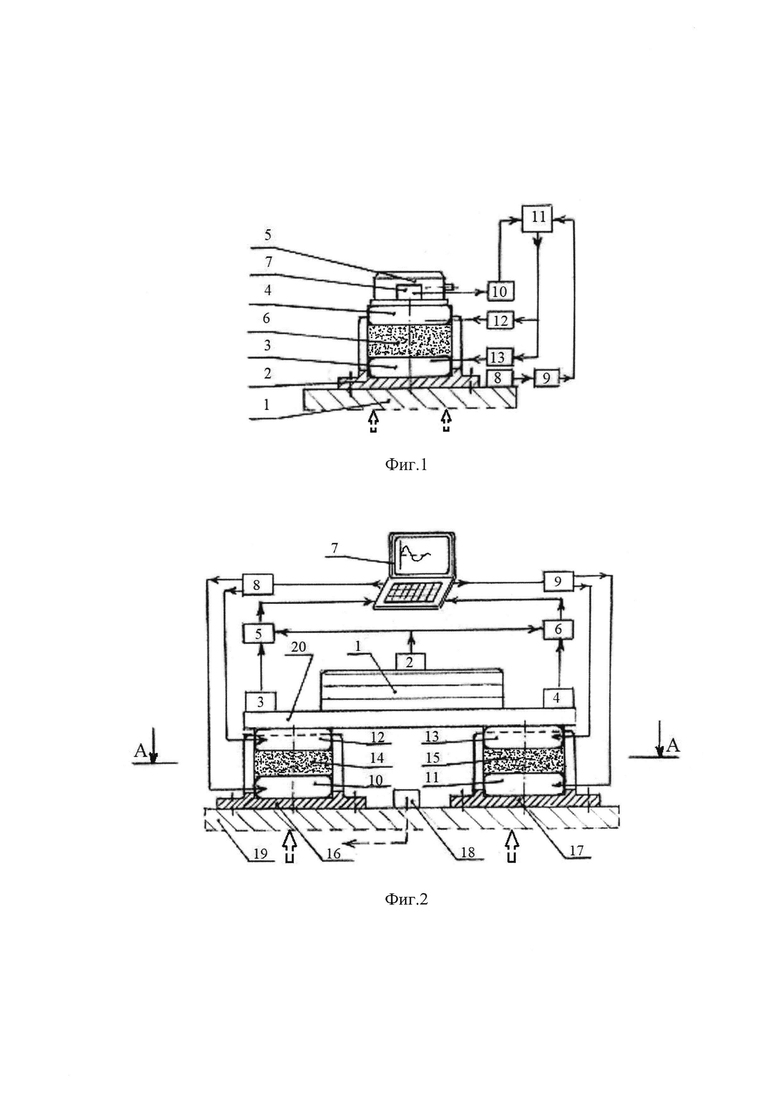
Устройство демпфера для активного гашения колебаний, содержащего одну опору показано на фиг. 1;
На фиг. 2 - схема многоопорного демпфера;
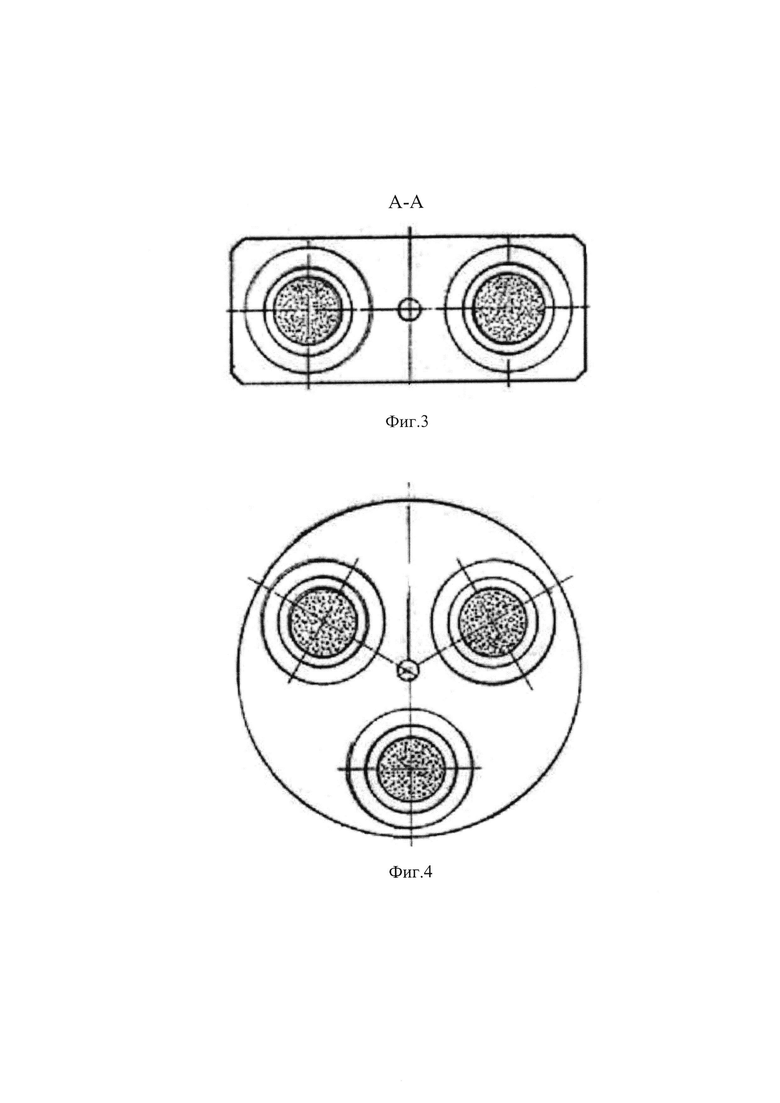
На фиг. 3 показано сечение А-А для расположения на опорном основании;
На фиг. 4 для расположения системы из трех опор. Магнитоэластичный управляемый демпфер содержит закрепленный на основании 1 корпус 2, в полости которого установлены электромагниты прямой и обратной полярности соответственно 3 и 4, выполненные в виде соленоида с железным сердечником (на фиг.1 не показан). В данной конструкции использована многослойная схема установки двух и более электромагнитов, расположенных в открытой сверху полости корпуса 2 с возможностью перемещения их при деформации от изменения нагрузки на демпфер и разделенных между собой слоями из эластичного магнитореологического материала опоры 6, при этом электромагниты соединены с системой активного управления с учетом определенной последовательности положения полярности магнитов с прямой и обратной связью, включающую в себя контрольный вибродатчик 7, опорный вибродатчик 8, аналого-цифровые преобразователи 9 и 10, цифро-аналоговые преобразователи 12 и 13 и компьютер с программным продуктом управления 11. Количество и последовательность расположения магнитореологических материалов и электромагнитов зависит от заданных условий нагрузочных деформаций. Кроме того, магнитоэластичный управляемый демпфер может быть выполнен в виде двух и более опор, установленных на опорное основание или фундамент.
Устройство содержит демпфируемое изделие 5 (в качестве примера на фиг. 1 показан электромотор. Нижний торец электромагнита 3 прямой полярности закреплен в корпусе 2, а верхний торец прикреплен к нижнему торцу опоры 6. Нижний торец электромагнита 4 обратной полярности прикреплен к верхнему торцу опоры 6. Электромагнит 4 с установленным на нем демпфируемым изделием 5 и магнитоуправляемая эластичная опора 6 установлены в корпусе 2 свозможностью свободного перемещения в направлении демпфирования колебаний объекта. Корпус 2 закреплен на основании 1. Устройство включает в себя активное управление магнитоуправляемой эластичной опоры 6 с обратной связью. Оно содержит вибродатчик опорного сигнала (например, пъезоакселерометр) 8, аналого-цифровой преобразователь (АЦП) 9 и 10, компьютер 11, цифро-аналоговый преобразователи (ЦАП) 12 и 13.
Устройство автоматического демпфирования работает следующим образом. Контрольный сигнал с вибродатчика 7 поступает в АЦП 10 и далее в компьютер 11. Сигнал с вибродатчика 8 поступает в АЦП 9 и далее в компьютер 11. В компьютере 11 происходит сравнение сигналов, поступивших с датчика 7 и датчика 8. После сравнительного анализа и обработки сигналов, при превышении допустимого порогового значения вибрации на контролируемом изделии 5, компьютер 11 подает управляющий сигнал на блоки ЦАП 12 или 13 для создания магнитных полей соответственно в электромагнитах 3 и 4. Электромагнит прямой полярности 3 в зависимости от подаваемой силы тока создает магнитный поток заданной силы на магнитоуправляемой опоре 6. Магнитоуправляемая эластичная опора деформируется вследствие диполь-дипольного взаимодействия мельчайших частиц материала наполнителя мягкой полимерной матрицы; частицы материала стягиваются и образуют непрерывные более плотные структуры в виде более жестких цепочек. Вследствие этого модуль упругости опоры 6 в зависимости от силы магнитного потока может многократно увеличиваться; жесткость опоры 6 соответственно увеличивается и, следовательно, растет резонансная частота демпфера. Электромагнит обратной полярности 4 создает встречное магнитное поле по отношению к магнитному полю, создаваемому электромагнитом 3. Демпферная опора 6 деформируется путем растяжения. Образованные непрерывные структуры материала в виде жестких цепочек растягиваются (разрываются), перераспределяются и становятся менее плотными вследствие этого модуль упругости и соответственно, жесткость опоры 6 уменьшается и, следовательно, резонансная частота демпфера уменьшается. Сигналы на управление электромагнитами задаются программой, установленной в компьютере 11 в соответствии с разработанными техническими условиями.
Вариант исполнения заявленного устройства демпфера для активного гашения колебаний, содержащего две опоры показан на фиг.2. Устройство содержит демпируемое изделие 1 (например, многослойная композитная пластина), контрольный вибродатчик 2, вибродатчики опорного сигнала 3 и 4 (например, пъезоакселерометры), аналого-цифровые преобразователи 5 и 6, компьютер 7, цифро-аналоговые преобразователи 8 и 9, электромагниты прямой полярности 10 и 11, электромагниты обратной полярности 12 и 13, магнитоуправляемые эластичные опоры 14 и 15, корпуса 16 и 17, контрольный датчик 18, опорное основание, (фундамент) 19, корпус 20. Демпфируемое изделие 1 может быть объединено с корпусом 20. На фиг. 3 показано сечение А-А для расположения на опорном основании (фундаменте) системы активного гашения колебаний, состоящей из двух опор. Устройство автоматического демпфирования колебаний может содержать более двух опор. На фиг. 4 показано сечение в этой же плоскости для расположения системы активного гашения колебаний, состоящей из трех опор. В этом варианте устройство позволяет демпфировать колебания в различных пространственных, угловых направлениях. Устройство автоматического демпфирования колебаний на двух опорах работает следующим образом. Опорные сигналы с вибродатчиков 3 и 4 передаются соответственно в АЦП 5 и 6. Сигнал с контрольного датчика 2 также поступает в АЦП 5 и 6. Переданные с АЦП 5 и 6 в компьютер 7 сигналы сравниваются и обрабатываются по заданной программе. Контрольный датчик 18 может встраиваться в данную схему обработки данных как датчик дополнительных сигналов на опорном основании 19. В соответствии с анализом полученных и обработанных сигналов с компьютера 7 после прохождения через ЦАП 8 и 9 подаются команды на управление электромагнитами 10, 11, 12 и 13.
Устройство позволяет с помощью регулировки упруго-жесткостных характеристик магнитоуправляемых опор 14 и 15 уводить демпфируемое изделие от резонансных частот, возникающих на рабочих режимах эксплуатации изделия 1. Смещение или увод резонансных частот может осуществляться в область более высоких частот - f2 или в область более низких частот - f3 относительно рабочей частоты - f1; показано на рис. 5. Увеличение жесткости опор 14 и 15 позволяет отстраивать или уходить от резонансной частоты в системе в более высокочастотную область колебаний демпфирования. Для устранения резонанса на рабочих частотах в системе и увода работы системы, с помощью настройки демпфера в высокочастотную область с компьютера 7 цифровые сигналы подаются на блоки ЦАП 8 и 9 и далее сигналы подаются на включение электромагнитов прямой полярности 10 и 11. Магнитоуправляемые опоры 14 и 15 приобретают большую жесткость, вследствие этого частота колебаний в системе возрастает. Уменьшение жесткости опор 14 и 15 позволяет уводить систему от возникающей резонансной частоты в низкочастотную область колебаний демпфирования. Для отстройки от резонансной частоты в системе и увода работы демпфера в низкочастотную область с компьютера 7 цифровые сигналы подаются на блоки ЦАП 8 и 9 и затем подаются сигналы на включение электромагнитов обратной полярности 12 и 13. Магнитоуправляемые опоры 14 и 15 изменяют жесткость на меньшие значения, частота колебаний в системе снижается. Многофункциональность устройства может быть расширена при использовании магнитоуправляемых опор в соответствии с заданными техническими условиями с необходимым количеством опор. Принцип работы устройства с 3-мя и большим количеством опор аналогичен описанному выше. Многофункциональность устройства расширяется при его установках и использовании в корпусах тонкостенных в том числе пространственных и протяженных конструкциях подверженных воздействию резонансных колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА И СПОСОБ НАСТРОЙКИ ОПТИМАЛЬНОГО РЕЖИМА ЕЁ РАБОТЫ | 2020 |
|
RU2744257C1 |
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2018 |
|
RU2695472C1 |
| АКТИВНАЯ ОПОРА | 2009 |
|
RU2404381C1 |
| МАГНИТНЫЙ ДЕМПФЕР | 2024 |
|
RU2826670C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2014 |
|
RU2561610C1 |
| Электромагнитный динамический поглотитель колебаний | 1962 |
|
SU151533A1 |
| УПРАВЛЯЕМАЯ ОПОРА | 2009 |
|
RU2404380C1 |
| Вибропоглощающая опора | 1981 |
|
SU1154499A1 |
| ДЕМПФЕР | 1996 |
|
RU2115842C1 |
Изобретение относится к области машиностроения. Магнитоэластичный управляемый демпфер содержит корпус, в полости которого установлен электромагнит в виде соленоида с железным сердечником. Установка электромагнитов выполнена по многослойной схеме. Электромагниты расположены в открытой сверху полости корпуса с возможностью перемещения их при деформации от изменения нагрузки на демпфер и разделенны между собой слоями из эластичного магнитореологического материала. Электромагниты соединены с системой активного управления с учетом определенной последовательности положения полярности магнитов с прямой и обратной связью. Система активного управления включает контрольный вибродатчик, опорные вибродатчики-пъезоакселерометры, управляющие блоки, аналого-цифровые преобразователи, цифроаналоговые преобразователи и компьютер с программным продуктом управления. Достигается расширение диапазона демпфирования. 2 з.п. ф-лы, 4 ил.
1. Магнитоэластичный управляемый демпфер, содержащий закрепленный на основании корпус, в полости которого установлен электромагнит в виде соленоида с железным сердечником, отличающийся тем, что в нем применена многослойная схема установки двух и более электромагнитов, расположенных в открытой сверху полости корпуса с возможностью перемещения их при деформации от изменения нагрузки на демпфер и разделенных между собой слоями из эластичного магнитореологического материала, при этом электромагниты соединены с системой активного управления с учетом определенной последовательности положения полярности магнитов с прямой и обратной связью, включающей в себя контрольный вибродатчик, опорные вибродатчики-пъезоакселерометры, управляющие блоки, аналого-цифровые преобразователи, цифроаналоговые преобразователи и компьютер с программным продуктом управления.
2. Магнитоэластичный управляемый демпфер по п. 1, отличающийся тем, что в нем количество и последовательность расположения магнитореологических материалов и электромагнитов зависит от заданных условий нагрузочных деформаций.
3. Магнитоэластичный управляемый демпфер по п. 1, отличающийся тем, что он выполнен в виде двух и более опор, установленных на опорное основание или фундамент.
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2002 |
|
RU2232316C2 |
| US 5170866 A, 15.12.1992 | |||
| US 5018606 A, 28.05.1991 | |||
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 1994 |
|
RU2084721C1 |

