Изобретение относится к области машиностроения, в частности к магнитореологическим амортизаторам, применяемым для демпфирования вибраций, создаваемых работающими силовыми агрегатами транспортных средств, стационарных энергетических установок, противооткатных устройств и т.п.
Одним из наиболее широко применяемых типов виброизоляции являются гидравлические виброопоры, позволяющие снизить нежелательные вибрации в широком диапазоне частот. Принцип работы гидравлической виброопоры основан на затухании колебаний в эластомере или в гидравлической жидкости, пропускаемой через дроссельные каналы. При этом энергия механических колебаний превращается в тепло, которое выделяется при внутреннем трении молекулярных цепей эластомера или в сжимаемой жидкости.
В части устройства известно техническое решение, реализованное в гидравлической виброопоре (патент RU 2135855 «Гидравлическая виброопора», МПК F16F5/00, F16F9/10, публ. 27.08.99 г.). Устройство содержит заполненные демпфирующей жидкостью рабочую и компенсационную камеры, ограниченные общим корпусом с закрепленной в нем металлической разделительной перегородкой, выполненной как с периферийной кольцевой полостью и дроссельными каналами, тангенциально примыкающими к ней и камерам, так и с дополнительными дроссельными каналами в ее средней части, сообщающими полость с указанными камерами, из которых рабочая камера ограничена опорной платой и эластичной обечайкой, а компенсационная - мембраной. При этом в средней части разделительной перегородки выполнены дополнительные дроссельные каналы диффузорного типа, сообщающие камеры и обращенные диффузорами в сторону, противоположную компенсационной камере, периферийная часть которой выполнена торообразной формы и тангенциально примыкающей к этим каналам.
В первом полупериоде входного гармонического вибросигнала движение демпфирующей жидкости через дроссельные каналы осуществляется из рабочей камеры в компенсационную. Пока предельное напряжение сдвига в рабочей жидкости не достигло критической величины, протекание рабочей жидкости через дроссельные каналы затруднено из-за ее значительной вязкости. На выходе каналов в компенсационную камеру возникают резкие градиенты сдвиговых напряжений. При дальнейшем повышении внешнего давления на опорную плату границы области разрушенной вязкопластичной среды расширяются, а возникшая в этих границах область ньютоновской рабочей жидкости создает турбулентные потоки. При определенных углах наклона дроссельных каналов обеспечивается тангенциальное направление вихревых потоков к внутренней поверхности торообразной полости, ограниченной снизу эластичной мембраной. Вовлекая в движение прилегающие слои рабочей жидкости, вихревые шнуры и потоки создают ее вращательное движение. Располагая дроссельные каналы под различными углами, спиралеообразные шнуры и потоки будут обладать разной длиной шагов, что вызовет интенсивный конвективный теплообмен.
Во втором полупериоде направления векторов статической и динамической нагрузок находятся в противофазе. В этом случае рабочая жидкость через дроссельные каналы и диффузоры начинает поступать в рабочую камеру. Ламинарный поток при входе в рабочую камеру вырождается на конвективные составляющие, скорость которых относительно перегородки значительно ниже, чем в турбулентных потоках в компенсационной камере. Поэтому сопротивление потоку рабочей жидкости в верхнюю рабочую камеру во втором полупериоде будет превышать сопротивление потоку через эти же каналы в компенсационную камеру в первом полупериоде. Одновременно нагретая рабочая жидкость через дроссельные каналы поступает в кольцевую полость, где за счет тангенциального ввода возрастает турбулентность потока и происходит интенсивный теплообмен с металлическим корпусом виброопоры. Выходы дроссельных каналов из кольцевой полости к внутренней поверхности обечайки обеспечивают вращающий момент ненагретой части рабочей жидкости. Взаимодействуя с ламинарными потоками нагретой жидкости, поступающей из диффузоров в рабочую камеру, вращающаяся часть ненагретой жидкости также нагревается.
Недостатки этой виброопоры следующие. Нагретая часть рабочей жидкости, поступая через диффузоры в рабочую камеру, за счет высокой теплопроводности быстро передает тепло ненагретой вращающейся части жидкости. При этом внутренняя часть эластичной обечайки виброопоры сильно нагревается, понижая ее рабочий ресурс. Масса нагретой части жидкости, поступающей через диффузоры, значительно превышает массу охлажденной жидкости, поступающей через дроссельные каналы в рабочую камеру. Этот эффект проявляется наиболее сильно при возрастании амплитуды внешнего вибросигнала, а значит усиливается негативное воздействие высоких температур на внутреннюю поверхность обечайки. Во-вторых, в объеме рабочей камеры имеются области с невозмущенными и маловозмущенными состояниями, что снижает ее демпфирующие характеристики, поскольку энергия колебаний от внешнего источника поглощается не полностью. Кроме этого, данная виброопора недостаточно эффективно поглощает энергию высокочастотных гармонических составляющих (свыше 500 Гц) входного вибросигнала.
Общий недостаток гидравлических виброопор заключается в том, что при некоторых режимах работы эти опоры не справляются со своими функциями и передают вибрации на корпус машины. Чтобы исключить такие вибрации используют активные виброопоры. Они устанавливаются обычно попарно и работают совместно с резинометаллическими или гидравлическими виброопорами. Принцип действия динамической виброопоры основан на свойстве находящейся в ней магнитореологической жидкости, которая способна менять вязкость при действии магнитного поля. При увеличении силы магнитного поля увеличивается вязкость магнитореологической жидкости. Для достижения максимальной динамики подключенный к виброопоре компьютер обеспечивает максимальное по силе магнитное поле, жидкость становится максимально вязкой. Для контроля и управления компьютер получает информацию о факторах, влияющих на работу виброопоры, и подает ток нужной величины через катушку электромагнита, что приводит к изменениям жесткости и коэффициента демпфирования виброопоры.
По патенту RU 2407929 «Гидравлическая виброопора», МПК F16F13/08, F16F13/30, публ. 27.12.2010 г. известно техническое решение в отношении устройства. Гидравлическая виброопора содержит заполненные демпфирующей жидкостью рабочую и компенсационную камеры, ограниченные общим корпусом с закрепленной в нем металлической разделительной перегородкой, выполненной как с периферийной кольцевой полостью, так и с промежуточной камерой с дополнительными дроссельными каналами в ее средней части, сообщающими указанные камеры. Рабочая и компенсационная камеры соединены дроссельными каналами и капиллярами. На противоположных сторонах металлической перегородки расположены два соленоида в виде отдельных электромагнитов, которые через усилитель мощности последовательно соединены с фазовращателем, согласующим усилителем и акселерометром, а выход согласующего усилителя соединен с осциллографом и блоком управления, который в свою очередь, соединен с фазовращателем.
При стационарной работе на виброопору действует знакопеременное давление. В первом полупериоде входного периодического вибросигнала динамическая нагрузка совпадает со статической. Тогда давление резко возрастает, что приводит к растяжению гибкой мембраны и к движению жидкости из рабочей камеры через дроссельные каналы в кольцевую и промежуточную камеры. Так как в промежуточной камере движущаяся магнитореологическая жидкость подвергается действию магнитного поля, то ее движение может ускоряться, или затормаживаться в зависимости от фазовых соотношений между питающим соленоиды током и внешним вибрационным сигналом. Поэтому, управляя фазовращателем, можно подобрать оптимальный фазовый сдвиг между этими сигналами, при котором происходит наиболее эффективное демпфирование, степень которого контролируется осциллографом.
Во втором полупериоде воздействия на виброопору входного вибросигнала давление в камерах понижается, и все описанные процессы проходят в обратном порядке. Поглощение акустической энергии в данной конструкции виброопоры происходит, прежде всего, в обечайке, так как опорная плата, на которую передаются основные высокочастотные составляющие спектра внешнего вибросигнала, полностью изолирована от рабочей камеры эластичной обечайкой. Благодаря жесткой перемычке с капиллярами циркуляция рабочей жидкости между камерами на низких частотах происходит более интенсивно, и вследствие этого возрастает диссипация энергии внешнего вибросигнала. На высоких частотах, более 50 Гц, основную роль в диссипации вибросигнала выполняют капилляры, заполненные рабочей жидкостью.
Однако данное устройство обладает некоторыми недостатками. Направление движения жидкости в дроссельных каналах, расположенных по центру жесткой перегородки, коллинеарно с направлением магнитного поля, создаваемого соленоидами. Поэтому работа магнитного поля эффективна только в областях его неоднородности, а это порядка 50% длины капилляров. Дроссельные каналы, выполненные в перегородке за пределами соленоидов, еще в меньшей степени подвергаются действию магнитного поля. В промежуточных камерах, расположенных внутри жесткой перегородки, рабочая жидкость не подвергается действию магнитного поля соленоидов, и со временем там образуется осадок магнитных частиц рабочей жидкости. При ударных нагрузках на виброопору этот осадок взбалтывается, и твердые частички попадают в дроссельные каналы, расположенные за пределами соленоидов. Такое явление может вызывать «тромбы» в этих каналах и понижать эффективность работы магнитоуправляемой виброопоры в целом.
По патенту US 9273748 «Magnetorheological damper system», МПК F16F9/535, публ. 01.03.2016 г. известно устройство и способ демпфирования виброперегрузок путем управления напряженностью магнитного поля магнитореологического демпфера. Устройство включает в себя основной корпус с резервуарной камерой и демпфер с демпферной камерой и подвижным поршнем. Резервуарная камера и демпфирующая камера герметично соединены друг с другом и заполнены магнитореологической жидкостью. Кроме того, резервуарная камера содержит резервуарный электромагнит, создающий магнитное поле внутри этой камеры. Внутри демпфера имеется электромагнит, магнитное поле которого регулирует вязкость магнитореологической жидкости, изменяя тем самым силу, необходимую для перемещения поршня. Кроме того устройство снабжено системой управления электромагнитами.
Способ управления магнитореологическим демпфером по патенту US 9273748 включает подачу команды управления демпфером на усилитель, управление частотой и рабочим циклом усилителя на основе разницы между требуемым и измеренным током через электромагнит магнитореологического демпфера, и подачу выходного тока демпфера на электромагнит магнитореологического демпфера на основе упомянутого управления. Предложено две схемы управления устройством с обратной связью и без обратной связи. В любом случае перед началом работы пользователь вручную или программно выбирает алгоритм управления работой демпфера. С помощью системы управления анализируют температуру магнитореологической жидкости, скорость перемещения штока (срабатывания демпфера) и силу демпфирования и сравнивают с заданными пороговыми значениями. Изменяя по определенному, заранее заданному закону магнитное поле влияют на вязкость магнитореологической жидкости, заполняющей камеры известного устройства, и, следовательно, меняют силу сопротивления движению поршня. Этот эффект позволяет управлять коэффициентом демпфирования.
Однако этот способ не позволяет определить оптимальный момент времени, в который необходимо менять управляющее магнитное поле. Кроме того, заранее заданная программа управления магнитным полем не учитывает изменение основной гармоники входного вибросигнала. Поэтому описанное выше решение не позволяет реализовать оптимальный режим работы магнитоуправляемой гидравлической виброопоры. Поэтому данный способ демпфирования непригоден для снижения уровней вибрации нестационарных вибропроцессов.
Наиболее близкой по технической сути в части устройства является виброопора, предложенная в патенте RU 2695472 «Магнитоуправляемая гидравлическая виброопора», публ. 23.07.2019 г., МПК F16F5/00. Известное устройство содержит заполненные демпфирующей магнитореологической жидкостью рабочую и компенсационную камеры, ограниченные общим корпусом с закрепленной в нем диамагнитной металлической разделительной перегородкой. Рабочая камера ограничена опорной платой и эластичной обечайкой, а компенсационная - мембраной. Дроссельные каналы, соединяющие рабочую и компенсационную камеры, выполнены внутри диамагнитной металлической разделительной перегородки. Диамагнитная металлическая разделительная перегородка выполнена в виде двух коаксиальных цилиндров и размещена внутри сердечника с обмотками индуктора, смещенными друг относительно друга на 360/n градусов, где n=3, 6, 12. При этом дроссельными каналами служат продольные каналы, выполненные в центральной части внутреннего коаксиального цилиндра, и цилиндрический зазор между внутренним и внешним коаксиальными цилиндрами. Обмотки индуктора подключены к преобразователю переменного напряжения, на вход которого поступает сигнал с входного датчика, прикрепленного к опорной плате. А выходной датчик, вырабатывающий демпфированный сигнал, расположен на выходе магнитоуправляемой гидравлической виброопоры.
Способ настройки оптимального режима работы известной виброопоры выбран в качестве способа-прототипа и заключается в следующем. На опорную плату воздействуют знакопеременной нагрузкой, в результате возникают два процесса. В одном из них деформируемая обечайка создает повышенное давление в рабочей камере, а так как рабочая жидкость является несжимаемой, часть ее из рабочей камеры поступает через дроссельные каналы в компенсационную камеру. В результате деформируется упругая мембрана. Одновременно появляется электрический сигнал с входного датчика, который подают на вход преобразователя переменного напряжения и далее на обмотки индуктора. Возникающим при этом магнитным полем действуют на демпфирующую магнитореологическую жидкость, находящуюся в цилиндрическом зазоре. Так как магнитные поля, возбуждаемые токами обмоток, сдвинуты по фазе на 360/n градусов, то в магнитореологической жидкости в зазоре между двумя коаксиальными цилиндрами кроме поступательного движения возникает и вращательное движение. Таким образом, движение магнитореологической жидкости происходит по спирали, что приводит к дополнительному трению и снижению седиментации. Демпфированный сигнал с выходного датчика преобразуют в электрический сигнал, поступающий на регистратор. По значению демпфированного сигнала судят о результатах демпфирования.
Однако данное техническое решение имеет некоторые недостатки. В начальный момент времени фаза магнитного поля, управляющего движением магнитореологической жидкости, относительно фазы основной гармоники входного вибросигнала совершенно произвольна. Поэтому нельзя заранее определить, будет ли она оптимальна в данном процессе. Для низкочастотных вибросигналов, ниже пятидесяти герц, предполагается, что оба сигнала в одной фазе, или близки к этому. Однако при этом не учитываются переходные процессы при формировании 3n-фазного напряжения, питающего индуктор. Даже в том случае, если эти оба сигнала оказались в фазе, то это еще не означает оптимального, с наибольшим эффектом демпфирования режима работы. Поскольку начальная вязкость рабочей среды, магниторелогической жидкости, совершенно не определена. Она зависит от температуры, различных взвесей, оставшихся кластеров и т.д.
Задачей предлагаемого изобретения является разработка магнитоуправляемой гидравлической виброопоры и способа настройки оптимального режима ее работы, обеспечивающих повышение эффективности и надежности работы магнитоуправляемой гидравлической виброопоры за счет нахождения оптимальной фазы магнитного поля относительно потока магнитореологической жидкости в дроссельном канале на основе критерия минимизации уровня демпфированного вибросигнала.
Технический результат в части устройства в предлагаемом изобретении достигается за счет того, что разработанная магнитоуправляемая гидравлическая виброопора, также как и виброопора - прототип, содержит заполненные демпфирующей магнитореологической жидкостью рабочую и компенсационную камеры, ограниченные общим корпусом с закрепленной в нем диамагнитной металлической разделительной перегородкой, при этом рабочая камера ограничена опорной платой и эластичной обечайкой, а компенсационная - мембраной, внутри диамагнитной металлической разделительной перегородки выполнены дроссельные каналы, соединяющие рабочую и компенсационную камеры, при этом диамагнитная металлическая разделительная перегородка размещена внутри сердечника с обмотками индуктора, смещенными друг относительно друга на 360/n градусов, где n=3, 6, 12, при этом обмотки индуктора подключены к преобразователю переменного напряжения, на вход которого поступает сигнал с входного датчика, прикрепленного к опорной плате, а выходной датчик, вырабатывающий демпфированный сигнал, расположен на выходе магнитоуправляемой гидравлической виброопоры.
Новым в разработанной магнитоуправляемой гидравлической виброопоре является то, что между входным датчиком и преобразователем переменного напряжения введена управляемая линия задержки, выходной датчик соединен с блоком управления управляемой линией задержки, формирующим цифровой сигнал на основе анализа данных о входном сигнале за предыдущий полупериод, при этом упомянутый блок управления соединен с управляемой линией задержки, управляющей фазой переменного вращающегося магнитного поля относительно движущегося потока магнитореологической жидкости на основе критерия минимизации уровня демпфированного выходного сигнала путем регулирования фазы напряжения, подаваемого на обмотки индуктора.
В частном случае реализации разработанной магнитоуправляемой гидравлической виброопоры блок управления линией задержки включает в себя формирователь импульсов, АЦП, линию постоянной задержки, первый и второй регистры и схему сравнения кодов, при этом вход формирователя импульсов подключен к выходному датчику, первый выход подключен к входу АЦП, а второй выход формирователя импульсов подключен к линии постоянной задержки, к первому и второму регистрам и к схеме сравнения кодов, выход которой соединен с управляемой линией задержки, причем выход АЦП подключен к входу первого регистра, выход которого соединен с входом второго регистра, при этом первый и второй регистры соединены со схемой сравнения кодов, а выход линии постоянной задержки подключен к АЦП.
Технический результат в части способа в предлагаемом изобретении достигается за счет того, что разработанный способ, как и способ - прототип, включает воздействие на виброопору внешней нагрузкой, получение сигнала на входном датчике, передачу этого сигнала на преобразователь переменного напряжения и далее на обмотки индуктора, смещенные друг относительно друга на 360/n градусов, где n=3, 6, 12, возникновение на них n-фазного напряжения, и создание вращающегося магнитного поля, ортогонального по отношению к направлению движения демпфирующей магнитореологической жидкости в дроссельных каналах, и регулирование вязкости этой движущейся демпфирующей магнитореологической жидкости, получение демпфированного выходного сигнала на выходном датчике.
Новым в разработанном способе является то, что перед подачей на преобразователь переменного напряжения сигнал, полученный с входного датчика, проходит через управляемую линию задержки, при этом демпфированный выходной сигнал с выходного датчика подают на блок управления управляемой линией задержки. В этом блоке демпфированный выходной сигнал преобразуют в последовательность импульсов и сравнивают амплитуды двух следующих друг за другом импульсов, анализируют и обрабатывают результат сравнения, после чего формируют цифровой сигнал и передают его на управляемую линию задержки. На основе этого цифрового сигнала, сформированного в предыдущий полупериод входного сигнала, меняют величину и направление сдвига управляемой линии задержки и регулируют фазу напряжения, подаваемого на обмотки индуктора. Причем управление фазой переменного вращающегося магнитного поля относительно движущегося потока магнитореологической жидкости осуществляют в течение всей работы виброопоры на основе критерия минимизации уровня демпфированного выходного сигнала.
На фиг. 1 представлена схема разработанной магнитоуправляемой гидравлической виброопоры.
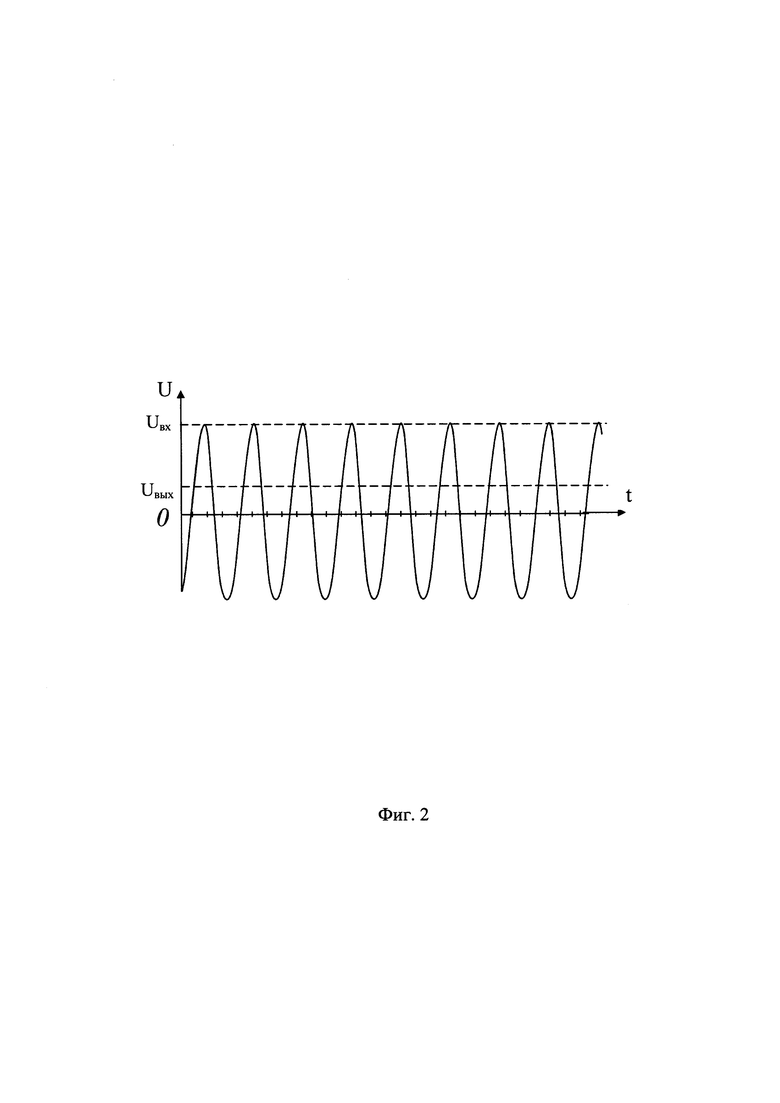
На фиг. 2 представлена амплитуда гармонического входного сигнала, воздействующего на виброопору, и амплитуда демпфированного выходного сигнала при отсутствии цифрового сигнала, поступающего на управляемую линию задержки.
На фиг. 3 представлена изменяющаяся амплитуда демпфированного сигнала, получаемого на выходе разработанной магнитоуправляемой гидравлической виброопоры.
На фиг. 4 представлены выходные импульсы с формирователя импульсов: а) последовательность коротких импульсов Δt, б) последовательность импульсов преобразованного выходного сигнала.
На фиг. 5 представлен внешний вид магнитоуправляемой гидравлической виброопоры.
Разработанная магнитоуправляемая гидравлическая виброопора (фиг. 1) содержит заполненные демпфирующей магнитореологической жидкостью рабочую камеру 1 и компенсационную камеру 2, ограниченные общим корпусом 3 с закрепленной в нем диамагнитной металлической разделительной перегородкой 4, при этом рабочая камера 1 ограничена опорной платой 5 и эластичной обечайкой 6, а компенсационная камера 2 - мембраной 7. Внутри диамагнитной металлической разделительной перегородки 4 выполнены дроссельные каналы 8, соединяющие рабочую камеру 1 и компенсационную камеру 2, при этом диамагнитная металлическая разделительная перегородка 4 размещена внутри сердечника 9 с обмотками индуктора 10, смещенными друг относительно друга на 360/n градусов, где n=3, 6, 12. Обмотки индуктора 10 подключены к преобразователю переменного напряжения 11, на вход которого поступает сигнал с входного датчика 12, прикрепленного к опорной плате 5, а выходной датчик 13, вырабатывающий демпфированный сигнал, расположен на выходе виброопоры. При этом между входным датчиком 12 и преобразователем переменного напряжения 11 введена управляемая линия задержки 14, а выходной датчик 13 соединен с управляемой линией задержки 14 посредством блока управления управляемой линией задержки 15. Этот блок 15 включает в себя формирователь импульсов 16, АЦП 17, линию постоянной задержки 18, первый регистр 19, второй регистр 20 и схему сравнения кодов 21. При этом вход формирователя импульсов 16 подключен к выходному датчику 13, первый выход подключен к входу АЦП 17, а второй выход формирователя импульсов 16 подключен к линии постоянной задержки 18, к первому регистру 19, к второму регистру 20 и к схеме сравнения кодов 21, выход которой соединен с управляемой линией задержки 14. А выход АЦП 17 подключен к входу первого регистра 19, выход которого соединен с входом второго регистра 20, при этом первый регистр 19 и второй регистр 20 соединены со схемой сравнения кодов 21, а выход линии постоянной задержки 18 подключен к АЦП 17.
При отсутствии цифрового сигнала, поступающего на управляемую линию задержки 14 из блока управления управляемой линией задержки 15, не происходит сдвига входного сигнала, передающегося на преобразователь переменного напряжения 11. Тогда при входном гармоническом сигнале с постоянной амплитудой Uвх демпфированный сигнал будет иметь также постоянную амплитуду Uвых, но меньшей величины (фиг. 2). На практике чаще встречаются случаи, когда входной сигнал, воздействующий на виброопору, имеет изменяющуюся амплитуду, тогда и амплитуда выходного демпфированного сигнала будет изменяться по величине от Umax до Umin (огибающая этого сигнала - кривая 1 на фиг. 3).
Для настройки оптимального режима работы магнитоуправляемой виброопоры необходимо обеспечить наименьшее значение демпфированного сигнала на выходе. Этого можно достичь за счет настройки оптимальной фазы магнитного поля относительно потока магнитореологической жидкости в дроссельных каналах.
Для этого по заявленному способу на виброопору воздействуют внешней нагрузкой и получают сигнал на входном датчике 12. Этот гармонический сигнал через управляемую линию задержки 14 передают на преобразователь переменного напряжения 11 и далее на обмотки индуктора 10, смещенные друг относительно друга на 360/n градусов, где n=3, 6, 12, при этом на них возникает n-фазное напряжение. Таким образом, создают вращающееся магнитное поле, ортогональное по отношению к направлению движения демпфирующей магнитореологической жидкости в дроссельных каналах 8. Это позволяет регулировать вязкость этой движущейся демпфирующей магнитореологической жидкости. Выходной демпфированный сигнал (фиг. 3) снимают с помощью выходного датчика 13.
При включении магнитоуправляемой гидравлической виброопоры первая полуволна сигнала с входного датчика 12 на преобразователь переменного напряжения 11 проходит без задержки. Сигнал с выходного датчика 13 передается на формирователь импульсов 16, который вырабатывает последовательность прямоугольных импульсов (фиг. 4б). Огибающая 1 соответствует импульсам выходного сигнала, поступающего с формирователя импульсов 16, в случае, если отсутствует цифровой сигнал, поступающий на управляемую линию задержки 14.
Кроме того в формирователе импульсов 16 в каждый момент перехода выходного сигнала через ноль вырабатывается короткий импульс Δt, который служит для записи информации из АЦП 17 в регистры и в другие блоки. Импульс Δt<<Т/2, где Т - период основной гармоники входного сигнала (фиг. 4а).
Последовательность импульсов из формирователя импульсов 16 передают в блок АЦП 17 и далее уже в виде цифрового кода записывают в первый регистр 19, при этом при включении виброопоры начальное состояние второго регистра 20 не меняется и в первый полупериод входного сигнала в схеме сравнения кодов 21 не происходит сравнения данных, цифровой сигнал управления для управляемой линии задержки 14 не вырабатывается.
После этого, вторая полуволна выходного сигнала проходит через формирователь импульсов 16. Импульсом Δt, проходящим через линию постоянной задержки 18, сбрасывается аналогово-цифровой преобразователь (АЦП 17). Этим же импульсом Δt переписывается цифровой код из первого регистра 19 во второй регистр 20. То есть регистры 19 и 20 служат для запоминания кодов амплитуд предыдущего и последующего импульсов. Амплитуды этих импульсов сравнивают в схеме сравнения кодов 21, а результат сравнения поступает на управляемую линию задержки 14.
Таким образом, в начале работы, при включении, в течение первого периода (двух полупериодов) работа магнитоуправляемой гидравлической виброопоры происходит без управления, то есть цифровой сигнал на управляемую линию задержки 14 не поступает. В это время только записывается информация в первый регистр 19 и во второй регистр 20. А в третьем полупериоде и в последующих происходит подача цифрового сигнала на управляемую линию задержки 14.
В случае, когда цифровой сигнал с выхода схемы сравнения кодов 21 больше нуля, выходной сигнал управляемой линии задержки 14 смещается (отстает) по фазе на 360/m, где m - число, соответствующее разности выходных сигналов второго регистра 20 и первого регистра 19. В случае, когда цифровой сигнал с выхода схемы сравнения кодов 21 меньше нуля, выходной сигнал управляемой линии задержки 14 смещается (опережает) по фазе на 360/m.
В течение всей работы магнитоуправляемой гидравлической виброопоры процесс непрерывно повторяется. Таким образом, информация на управляемую линию задержки 14 поступает на основе обработки сигналов, полученных в предыдущей и пред-предыдущей половинах периода, то есть происходит управление преобразователем переменного напряжения 11 на основе обработанной информации в предыдущую половину периода колебаний входного сигнала. Это происходит до тех пор, пока колебания объекта не станут минимально возможными. Сплошная кривая 2 (фиг. 3) показывает демпфированный выходной сигнал при подаче цифрового сигнала на управляемую линию задержки 14. Величина изменения амплитуды выходного сигнала (ΔU) определяется минимальным изменением цифрового сигнала (значением младшего разряда), подаваемого на управляемую линию задержки 14 со схемы сравнения кодов 21. На фиг. 3 величина ΔU имеет качественное значение.
Если амплитуды двух следующих друг за другом импульсов, записываемые в первый регистр 19 и во второй регистр 20, становятся равными, или амплитуда последующего импульса начнет превалировать, то фаза магнитного поля является оптимальной. Сигнал от блока управления управляемой линией задержки 15 и управляемая линия задержки 14 поддерживают требуемый режим работы, соответствующий минимальному демпфированному сигналу. При этом выходной демпфированный сигнал с выходного датчика 13 имеет вид, соответствующий кривой 2 на фиг. 3, а последовательность импульсов с формирователя импульсов 16 имеет вид последовательности 2 на фиг. 4.
Пример конкретной реализации разработанной виброопоры и способа настройки оптимального режима ее работы приведен ниже. Образец виброопоры был изготовлен в Нижегородском филиале ИМАШ РАН (фиг. 5). Виброопора рассчитана на статическую нагрузку 800-5000 Н, частотный диапазон эффективного демпфирования составляет 1-150 Гц, допустимая температура рабочей окружающей среды от -60°С до +70°С.
При настройке оптимального режима работы согласно предложенному способу на разработанную виброопору воздействовали гармоническим вибросигналом с частотой fсигн=100 Гц (период сигнала Т=10 мс). Величина короткого импульса Δt составила 2 мкс (так как Δt<<Т/2, а Т/2=5 мс). Время задержки, характеризующее линию постоянной задержки 18, составило 30-60 нс (время, необходимое для переписи сигнала с выхода АЦП 17 в первый регистр 19). При этом суммарное время срабатывания сигналов микросхем составило tсумм=100 нс. Минимальный временной сдвиг управляемой линии задержки 14 находился в пределах (3-5) Δt, то есть имел значения от 6 мкс до 10 мкс. Если со схемы сравнения кодов 21 разность была положительная, то сдвиг управляемой линии задержки 14 происходил влево (в сторону опережения управления обмотками индуктора 10), если разность со схемы сравнения кодов 21 была меньше нуля, то сдвиг управляемой линии задержки 14 происходил вправо (в сторону отставания управления обмотками индуктора 10).
Согласно экспериментальным данным применение разработанной виброопоры уменьшило уровень вибраций по ускорению примерно на 20 дБ по сравнению с известными аналогами виброопор при тех же условиях.
Таким образом, введение в магнитоуправляемую гидравлическую виброопору управляемой линии задержки и блока управления этой линией задержки позволяет формировать цифровой сигнал на основе сравнения амплитуд двух следующих друг за другом импульсов выходного сигнала и управлять фазой переменного вращающегося магнитного поля относительно движущегося потока магнитореологической жидкости, повышая тем самым эффективность и надежность разработанной виброопоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2018 |
|
RU2695472C1 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 2014 |
|
RU2561610C1 |
| Магнитореологический амортизатор | 2015 |
|
RU2645484C2 |
| ВИБРООПОРА (ВАРИАНТЫ) | 2022 |
|
RU2787901C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2009 |
|
RU2407929C1 |
| Способ настройки оптимального режима работы дебалансных роторных механизмов и устройство для его осуществления | 2022 |
|
RU2785473C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2011 |
|
RU2471098C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 1996 |
|
RU2104424C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 2006 |
|
RU2307963C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2006 |
|
RU2307267C1 |




Группа изобретений относится к области машиностроения. В виброопоре между входным датчиком и преобразователем переменного напряжения введена управляемая линия задержки. Выходной датчик соединен с блоком управления управляемой линией задержки. Блок управления формирует цифровой сигнал на основе анализа данных о входном сигнале за предыдущий полупериод. Блок управления соединен с управляемой линией задержки, которая управляет фазой переменного вращающегося магнитного поля относительно движущегося потока магнитореологической жидкости. В способе перед подачей на преобразователь переменного напряжения сигнал, полученный с входного датчика, проходит через управляемую линию задержки. Демпфированный сигнал с выходного датчика подают на блок управления. Сигнал преобразуют в последовательность импульсов и сравнивают амплитуды двух следующих друг за другом импульсов. Анализируют и обрабатывают результат сравнения. Формируют цифровой сигнал и передают его на управляемую линию задержки. Этим цифровым сигналом меняют величину и направление сдвига управляемой линии задержки и регулируют фазу напряжения, подаваемого на обмотки индуктора. Достигается повышение эффективности и надежности работы виброопоры. 2 н. и 1 з.п. ф-лы, 5 ил.
1. Магнитоуправляемая гидравлическая виброопора, содержащая заполненные демпфирующей магнитореологической жидкостью рабочую и компенсационную камеры, ограниченные общим корпусом с закрепленной в нем диамагнитной металлической разделительной перегородкой, при этом рабочая камера ограничена опорной платой и эластичной обечайкой, а компенсационная - мембраной, внутри диамагнитной металлической разделительной перегородки выполнены дроссельные каналы, соединяющие рабочую и компенсационную камеры, при этом диамагнитная металлическая разделительная перегородка размещена внутри сердечника с обмотками индуктора, смещенными друг относительно друга на 360/n градусов, где n=3, 6, 12, при этом обмотки индуктора подключены к преобразователю переменного напряжения, на вход которого поступает сигнал с входного датчика, прикрепленного к опорной плате, а выходной датчик, вырабатывающий демпфированный сигнал, расположен на выходе магнитоуправляемой гидравлической виброопоры, отличающаяся тем, что между входным датчиком и преобразователем переменного напряжения введена управляемая линия задержки, выходной датчик соединен с блоком управления управляемой линией задержки, формирующим цифровой сигнал на основе анализа данных о входном сигнале за предыдущий полупериод, при этом упомянутый блок управления соединен с управляемой линией задержки, управляющей фазой переменного вращающегося магнитного поля относительно движущегося потока магнитореологической жидкости на основе критерия минимизации уровня демпфированного выходного сигнала путем регулирования фазы напряжения, подаваемого на обмотки индуктора.
2. Магнитоуправляемая гидравлическая виброопора по п. 1, отличающаяся тем, что блок управления линией задержки включает в себя формирователь импульсов, АЦП, линию постоянной задержки, первый и второй регистры и схему сравнения кодов, при этом вход формирователя импульсов подключен к выходному датчику, первый выход подключен к входу АЦП, а второй выход формирователя импульсов подключен к линии постоянной задержки, к первому и второму регистрам и к схеме сравнения кодов, выход которой соединен с управляемой линией задержки, причем выход АЦП подключен к входу первого регистра, выход которого соединен с входом второго регистра, при этом первый и второй регистры соединены со схемой сравнения кодов, а выход линии постоянной задержки подключен к АЦП.
3. Способ настройки оптимального режима работы магнитоуправляемой гидравлической виброопоры, включающий воздействие на виброопору внешней нагрузкой, получение сигнала на входном датчике, передачу этого сигнала на преобразователь переменного напряжения и далее на обмотки индуктора, смещенные друг относительно друга на 360/n градусов, где n=3, 6, 12, возникновение на них n-фазного напряжения, и создание вращающегося магнитного поля, ортогонального по отношению к направлению движения демпфирующей магнитореологической жидкости в дроссельных каналах, и регулирование вязкости этой движущейся демпфирующей магнитореологической жидкости, получение демпфированного выходного сигнала на выходном датчике, отличающийся тем, что перед подачей на преобразователь переменного напряжения сигнал, полученный с входного датчика, проходит через управляемую линию задержки, при этом демпфированный выходной сигнал с выходного датчика подают на блок управления управляемой линией задержки, причем в этом блоке демпфированный выходной сигнал преобразуют в последовательность импульсов и сравнивают амплитуды двух следующих друг за другом импульсов, анализируют и обрабатывают результат сравнения, после чего формируют цифровой сигнал и передают его на управляемую линию задержки, на основе этого цифрового сигнала, сформированного в предыдущий полупериод входного сигнала, меняют величину и направление сдвига управляемой линии задержки и регулируют фазу напряжения, подаваемого на обмотки индуктора, причем управление фазой переменного вращающегося магнитного поля относительно движущегося потока магнитореологической жидкости осуществляют в течение всей работы виброопоры на основе критерия минимизации уровня демпфированного выходного сигнала.
| МАГНИТОУПРАВЛЯЕМАЯ ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2018 |
|
RU2695472C1 |
| ГИДРАВЛИЧЕСКАЯ ВИБРООПОРА | 2009 |
|
RU2407929C1 |
| DE 10117817 A1, 17.10.2002 | |||
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ РЕГМАТОГЕННОЙ ОТСЛОЙКИ СЕТЧАТКИ, СОЧЕТАЮЩЕЙСЯ С ЗАДНЕЙ ОТСЛОЙКОЙ СТЕКЛОВИДНОГО ТЕЛА | 2000 |
|
RU2203001C2 |

