i
to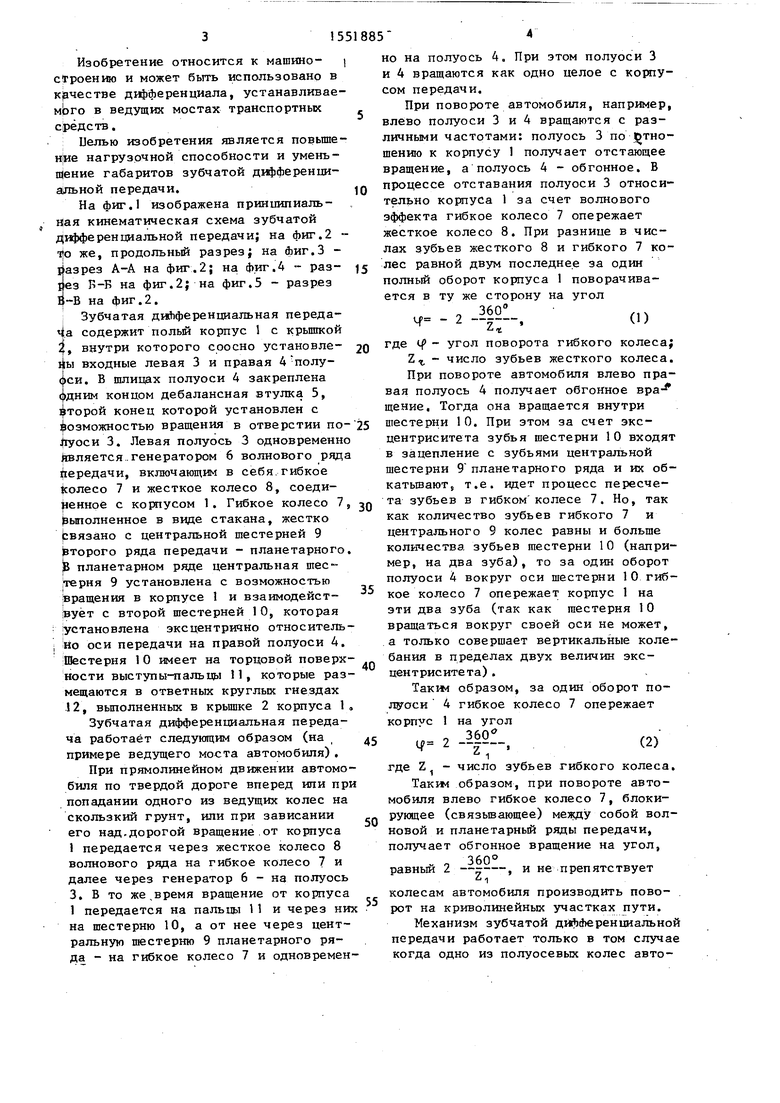
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциал транспортного средства | 1990 |
|
SU1714250A1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |
| Безынерционная дифференциальная передача | 1988 |
|
SU1576362A1 |
| Дифференциал транспортного средства | 1986 |
|
SU1361038A1 |
| Волновая дифференциальная передача | 1990 |
|
SU1722910A1 |
| САМОБЛОКИРУЮЩИЙСЯ ДИФФЕРЕНЦИАЛ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2089409C1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ С ЗУБЧАТОЙ ПЕРЕДАЧЕЙ, РАБОТАЮЩЕЙ НА СЖИМАЕМОЙ СРЕДЕ | 2015 |
|
RU2643280C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Самоблокирующийся дифференциал колесного транспортного средства | 1987 |
|
SU1498642A1 |
Изобретение относится к машиностроению и может быть использовано в качестве дифференциала, устанавливаемого в ведущих мостах транспортных средств. Целью изобретения является повышение нагрузочной способности и уменьшение габаритов зубчатой дифференциальной передачи. Указанная цель достигается за счет того, что в устройстве, содержится два соосных полуосевых ряда, один из которых является волновым, а другой - планетарным. Гибкое колесо волнового ряда жестко связано с центральной шестерней 9 планетарного ряда, вторая шестерня 10 которого установлена на входной полуоси 4 эксцентрично относительно оси передачи. 1 з.п. ф-лы, 4 ил.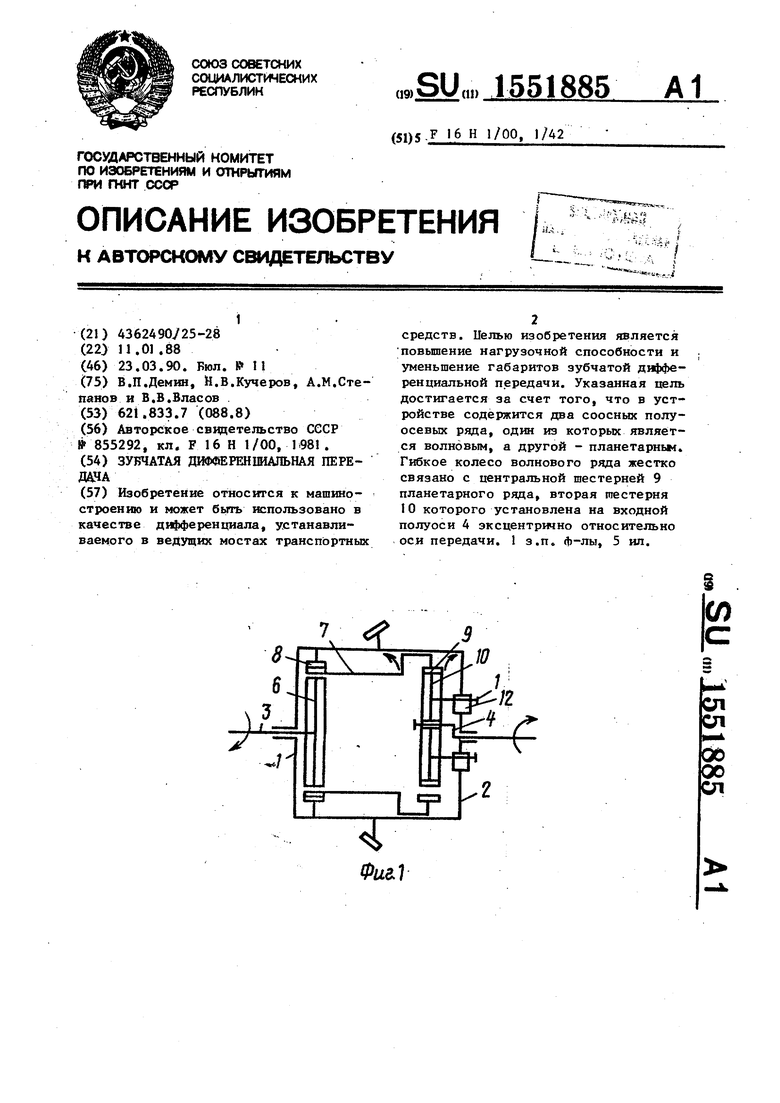
ю
Изобретение относится к машино- | строению и может быть использовано в качестве дифференциала, устанавливаемого в ведущих мостах транспортных, средств.
иелью изобретения является повышение нагрузочной способности и уменьшение габаритов зубчатой дифференциальной передачи.ю
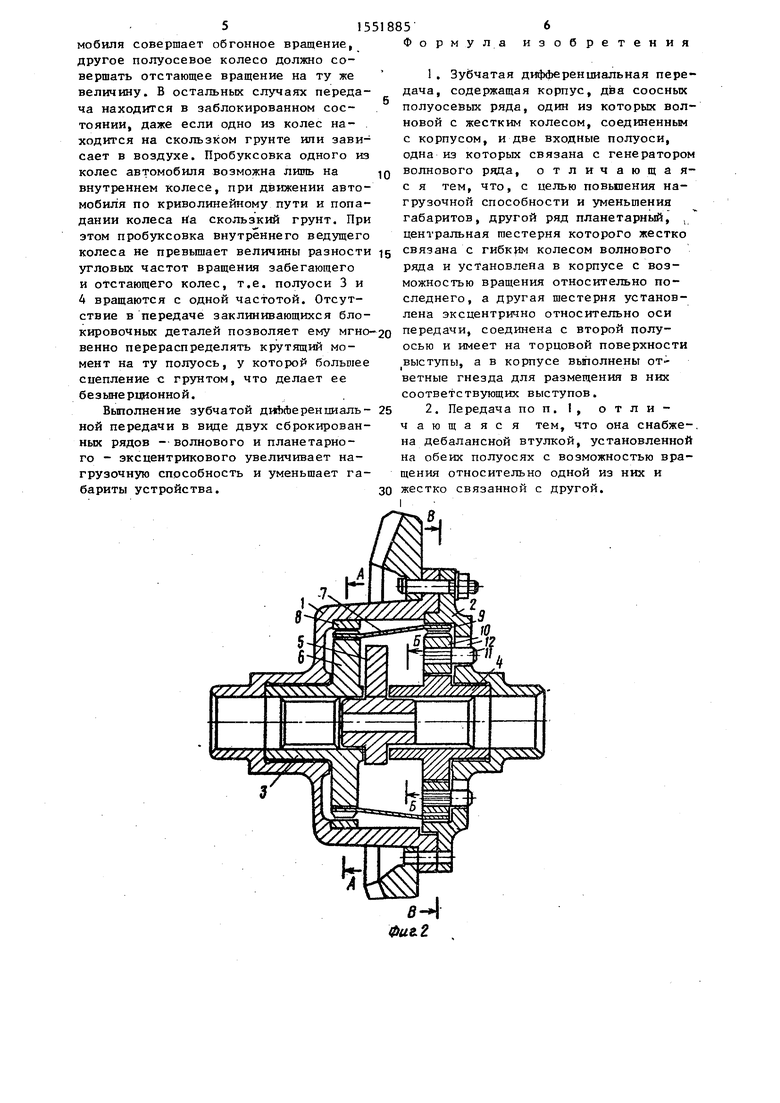
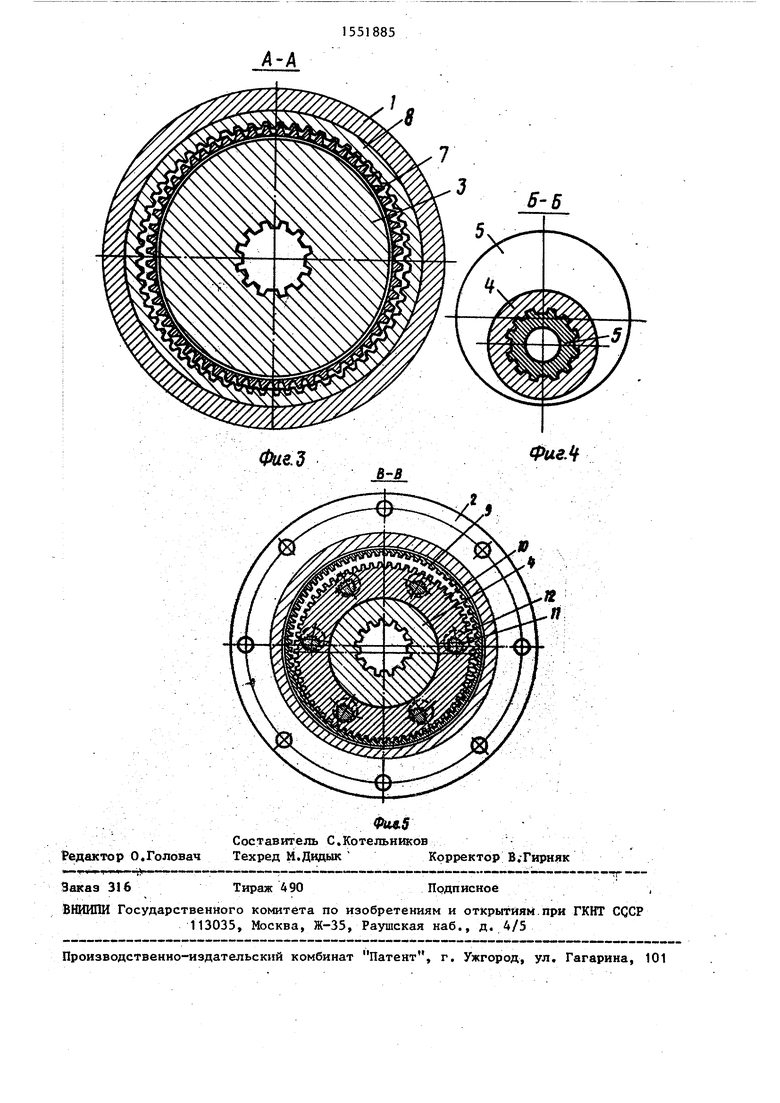
На фиг.1 изображена принципиальная кинематическая схема зубчатой дифференциальной передачи; на фиг.2 - то же, продольный разрез; на дшг.З - разрез А-А на фиг.2; на фиг.4 - раз- 15 рез Б-Б на фиг.2; на фиг.5 - разрез В-В на фиг.2.
Зубчатая дифференциальная передача содержит полый корпус 1 с крышкой 2, внутри которого соосно установле- 20 ны входные левая 3 и правая 4 полуоси. В шлицах полуоси 4 закреплена одним концом дебалансная втулка 5, второй конец которой установлен с возможностью вращения в отверстии по- 25 луоси 3. Левая полуось 3 одновременно является генератором 6 волнового ряда передачи, включающим в себя гибкое колесо 7 и жесткое колесо 8, соедино на полуось 4. При этом полуоси 3 и 4 вращаются как одно целое с корпу сом передачи.
При повороте автомобиля, например влево полуоси 3 и 4 вращаются с раз- личными частотами: полуось 3 по тно шению к корпусу 1 получает отстающее вращение, а полуось 4 - обгонное. В процессе отставания полуоси 3 относи тельно корпуса 1 за счет волнового эффекта гибкое колесо 7 опережает жесткое колесо 8. При разнице в числах зубьев жесткого 8 и гибкого 7 ко лес равной двум последнее за один полный оборот корпуса 1 поворачивается в ту же сторону на угол
Ч- - 2 -JWL.(,)
Lt
где ср - угол поворота гибкого колеса
2г - число зубьев жесткого колеса
При повороте автомобиля влево пра вая полуось 4 получает обгонное вра- щение. Тогда она вращается внутри шестерни 10. При этом за счет эксцентриситета зубья шестерни 10 входя в зацепление с зубьями центральной шестерни 9 планетарного ряда и их об катывают, т.е. идет процесс пересчененное с корпусом 1. Гибкое колесо 7, 30 та зубьев в гибком колесе 7. Но, так
как количество зубьев гибкого 7 и центрального 9 колес равны и больше количества зубьев птестерни 10 (напри мер, на два зуба), то за один оборот полуоси 4 вокруг оси шестерни 10 гиб кое колесо 7 опережает корпус 1 на эти два зуба (так как шестерня 10 вращаться вокруг своей оси не может, а только совершает вертикальные коле бания в пределах двух величин эксцентриситета) .
выполненное в виде стакана, жестко связано с центральной шестерней 9 второго ряда передачи - планетарного. В планетарном ряде центральная шестерня 9 установлена с возможностью вращения в корпусе 1 и взаимодействует с второй шестерней 10, которая установлена эксцентрично относительно оси передачи на правой полуоси 4. Шестерня 10 имеет на торцовой поверхности выступы-пальцы 11, которые размещаются в ответных круглых гнездах 12, выполненных в крышке 2 корпуса 1. Зубчатая дифференциальная передача работает следующим образом (на примере ведущего моста автомобиля).
При прямолинейном движении автомобиля по твердой дороге вперед или при попадании одного из ведущих колес на скользкий грунт, или при зависании его над.дорогой вращение от корпуса 1 передается через жесткое колесо 8 волнового ряда на гибкое колесо 7 и далее через генератор 6 - на полуось 3. В то же время вращение от корпуса 1 передается на пальцы 11 и через них на шестерню 10, а от нее через центральную шестерню 9 планетарного ряда - на гибкое колесо 7 и одновременно на полуось 4. При этом полуоси 3 и 4 вращаются как одно целое с корпусом передачи.
При повороте автомобиля, например, влево полуоси 3 и 4 вращаются с раз- личными частотами: полуось 3 по тно- шению к корпусу 1 получает отстающее вращение, а полуось 4 - обгонное. В процессе отставания полуоси 3 относительно корпуса 1 за счет волнового эффекта гибкое колесо 7 опережает жесткое колесо 8. При разнице в числах зубьев жесткого 8 и гибкого 7 колес равной двум последнее за один полный оборот корпуса 1 поворачивается в ту же сторону на угол
Ч- - 2 -JWL.(,)
Lt
где ср - угол поворота гибкого колеса;
2г - число зубьев жесткого колеса.
При повороте автомобиля влево правая полуось 4 получает обгонное вра- щение. Тогда она вращается внутри шестерни 10. При этом за счет эксцентриситета зубья шестерни 10 входят в зацепление с зубьями центральной шестерни 9 планетарного ряда и их обкатывают, т.е. идет процесс пересчета зубьев в гибком колесе 7. Но, так
как количество зубьев гибкого 7 и центрального 9 колес равны и больше количества зубьев птестерни 10 (например, на два зуба), то за один оборот полуоси 4 вокруг оси шестерни 10 гибкое колесо 7 опережает корпус 1 на эти два зуба (так как шестерня 10 вращаться вокруг своей оси не может, а только совершает вертикальные колебания в пределах двух величин эксцентриситета) .
Таким образом, за один оборот полуоси 4 гибкое колесо 7 опережает на угол 360°
корпус I
ц,- 2
(2)
0
5
где Z1 - число зубьев гибкого колеса. Таким образом, при повороте автомобиля влево гибкое колесо 7, блокирующее (связывающее) между собой волновой и планетарный ряды передачи, получает обгонное вращение на угол,
- - 360° равный 2 -, и не препятствует
1
колесам автомобиля производить поворот на криволинейных участках пути.
Механизм зубчатой диЛ(Ьеренииальной передачи работает только в том случае когда одно из полуосевых колес авто8-Фиг. 2
Фие.З
Редактор О.Головач
Фил.5
Составитель С.Котельников
Техред М.Дидык Корректор В.Тирняк
Заказ 316
Тираж 490
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг.
в-в
9
Подписное
| Дифференциальная волновая зубчатая передача | 1977 |
|
SU855292A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
