на скользкий грунт вращение от корпуса 1 дифференциала передается, во-первых, на неподвижно закрепленное в корпусе жесткое колесо 10 и находящееся с ним в зацеплении гибкое колесо, состоящее из сочлененных сегментов 7 и 8, и далее через
тела качения 11 на эллиптический генератор волн 5 и закрепленную внутри него полуось 3, а, во-вторых, через пальцы 17 - на круглую шестерню 15, кинематически связанную с левой 3 и правой 4 полуосями, что исключает пробуксовку любого из колес. 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Безынерционная дифференциальная передача | 1988 |
|
SU1576362A1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |
| Зубчатая дифференциальная передача | 1988 |
|
SU1551885A1 |
| Волновая дифференциальная передача | 1990 |
|
SU1722910A1 |
| ПРОТИВОБУКСУЮЩИЙ ДИФФЕРЕНЦИАЛ | 1993 |
|
RU2091644C1 |
| Управляемый ведущий мост транспортного средства | 1989 |
|
SU1743968A1 |
| ВОЛНОВОЙ ДИФФЕРЕНЦИАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2413889C2 |
| Дифференциал транспортного средства | 1986 |
|
SU1361038A1 |
| ДИФФЕРЕНЦИАЛ В.П.ДЕМИНА | 1997 |
|
RU2129232C1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПРОТИВОБУКСУЮЩАЯ ПЕРЕДАЧА | 1993 |
|
RU2091645C1 |
Изобретение относится к транспортному машиностроению. Целью изобретения является пЬвышение долговечности работы и сокращение габаритов дифференциала за счет повышения проч.ности гибкого колеса волновой передачи. При движении транспортного средства вперед или назад, а также при попадании одного из ведущих колесВХ'-5^Ji^ ГО СЛ О
Изобретение относится к транспортному машиностроению, в частности к дифференциалам транспортных средств.
Известен бесфрикционный самоблокирующийся дифференциал свободного хода, содержащий приводной корпус, внутри которого соосно друг другу установлены полуоси и бортовые передачи, посредством которых полуоси кинематически связаны между собой и с корпусом. Одной из особенностей дифференциала является то. что его полуосевые бортовые передачи выполнены волновыми, генератор волн каждой из которых связан с соответствующей полуосью. При этом гибкое колесо одной бортовой передачи закреплено на корпусе и зацеплено с жестким колесом, свободно установленном в корпусе, и с которым связано гибкое колесо другой бортовой передачи, зацепленное с выполненным в корпусе венцом с внутренними зубьями.
Основным недостатком данного дифференциала является его повышенные габариты.
Известна дифференциальная волновая зубчатая передача, содержащая размещенные в корпусе два жестких колеса, одно из которых остановлено, свободно установленное гибкое колесо с перегородкой в средней части и два генератора волн, причем другое жесткое колесо установлено свободно, а передача снабжена жестко соединенным с перегородкой валиком, установленным в двухсторонних опорах коаксиально оси передачи.и симметрично относительно перегородки. Указанная передача относится к планетарным волновым дифференциалам свободного хода, которые обеспечивают свободную обкатку забегаю щих колес на изгибах дороги и обеспечивают также блокировку полуосей колес, не давая пробуксовывать одному из ведущих колес транспортного средства.
Однако выполнение одного из жестких колес остановленным, т.е. жестко соединенным с неподвижными элементами корпуса дифференциала, приводит к снижению надежности и технологичности последнего.
Кроме того, выполнение гибкого колеса с перегородкой в средней части, скрепленной валиком, установленным в двухсторонних опорах коаксиально оси передачи, усложняет конструкцию дифференциала и приводит к значительному увеличению габаритов в осевом направлении.
Наиболее близкой к предлагаемому является передача, содержащая приводной
корпус, внутри которого соосно одна другой установлены полуоси, бортовые передачи,посредством которых полуоси кинематически связаны между собой и с корпусом, и гибкое колесо. Одна из полуосей дифференциала выполнена в виде волновой бортовой передачи, а другая полуось выполнена в виде эксцентриковой зубчатой планетарной передачи, каждая из которых связана с соответствующей полуосью бортовой передачи гибким зубчатым колесом. Гибкое колесо выполнено в виде полого стакана, на одном конце которого имеется внутренний зубчатый венец, а на другом его конце - наружный зубчатый венец, при этом его наружные
зубья входят в зацепление с жестким зубчатым колесом, укрепленным жестко в корпусе дифференциала, а внутренние зубья входят в зацепление с зубчатым колесом эксцентриковой планетарной передачи, при
этом в теле эксцентриковой зубчатой передачи укреплены пальцы, размещенные в круглых гнездах корпуса дифференциала.
Недостатками данной безынерционной дифференциальной передачи являются недостаточная долговечность и повышенные габариты вследствие выполнения сплошным и тонкостенным гибкого колеса волновой передачи.
Целью, изобретения является повышёние долговечности работы и сокращение габаритов.
Указанная цель достигается тем, что в известном дифференциале транспортного средства, содержащем приводной корпус,
внутри которого соосно одна другой установлены полуоси, планетарные эксцентриковая и волйовая зубчатые передачи, посредством которых полуоси кинематически связаны между собой и с корпусом, в центральном колесе с внутренними зубьями эксцентриковой передачи выполнены цилиндрические гнезда, размещенные равномерно по окружности соосно полуосям, а гибкое колесо выполнено из сочлененных зубчатых сегментов, каждый из которых имеет палец для взаимодействия с гнездами.
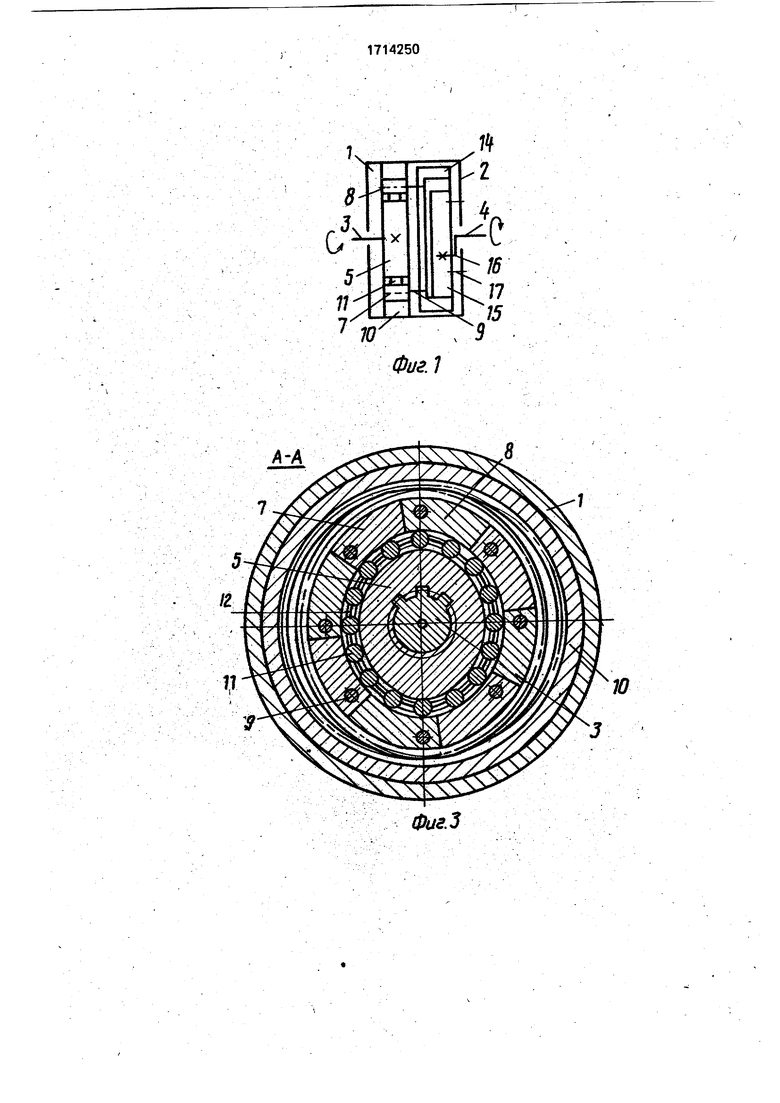
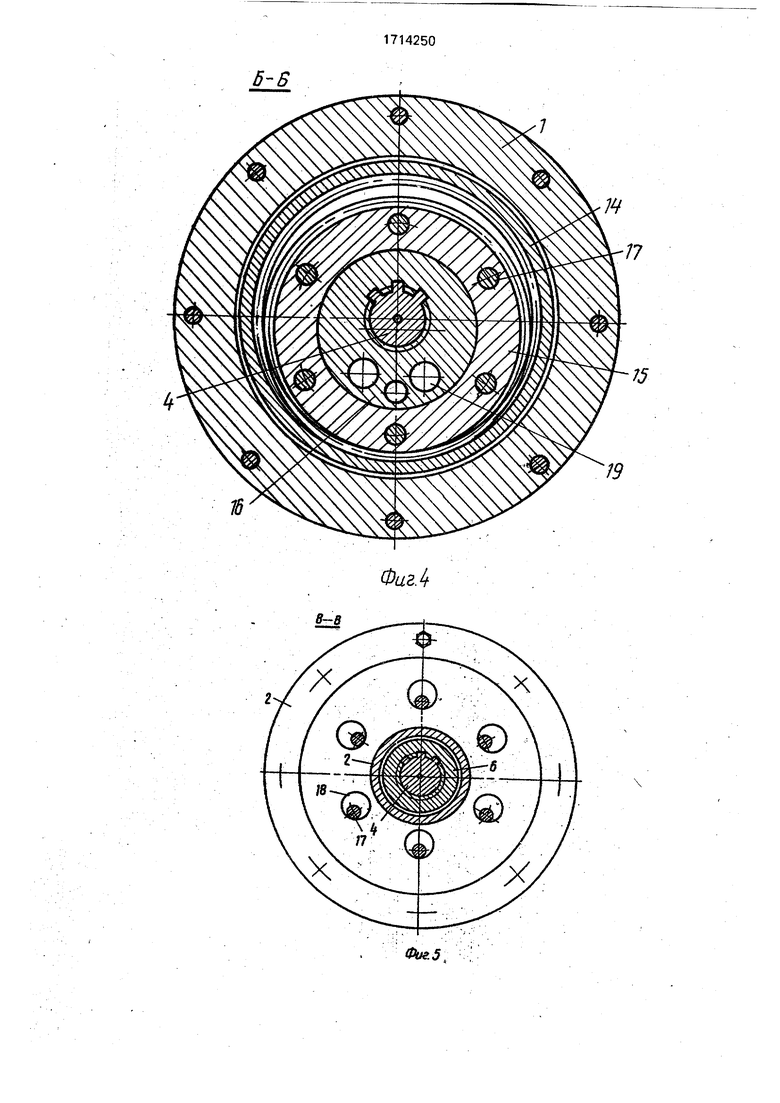
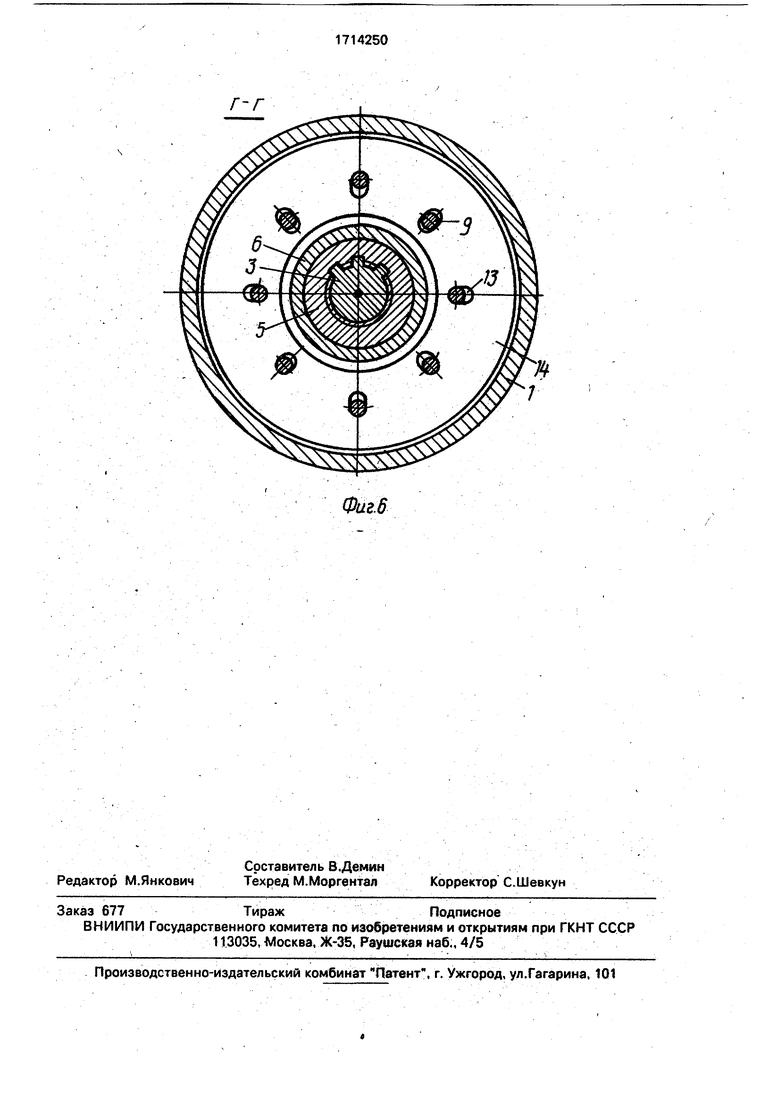
На фиг. 1 изображена принципиальная кинематическая схема дифференциала транспортного средства, на фиг. 2 - дифференциал транспортного средства, продольный разрез; на фиг. 3 - разрез А-А на фиг. 2: на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 разрез В-В на фиг. 2; на фиг. б - разрез Г-Г на фиг. 2.
Дифференциал транспортного средства состоит из приводного корпуса 1 с крышкой 2, внутри которого соосно одна другой установлены полуоси 3 и 4, кинематически связанные между собой и с KopriycoM 1 волновой и планетарной эксцентриковой зубчатыми передачи порредством соответственного закрепления на полуосях 3 и 4 элиптического генератора 5 и эксцентриковой втулки 6. Элиптический генератор 5 волн {взаимодействует с сочлененными зубчатыми сегментами 7 и 8 гибкого зубчатого попеса, которые установлены шарнирно на пальцах 9 и входят во внутреннее зацепление с неподвижно закрепленным в корпусе I дифференциала жестким колесом 10. Между генератором 5 волн и сочлененными зубчатыми сегментами 7 и 8 гибког э зубчатого колеса размещены тела И качения (ролики или шарики), свободно скрепленные между собой гибким сепаратором 12. Концы пальцев 9 шарнирных зубчатых сегментов 7 и 8 размещены в цилиндрических гнездах 13 подвижно установленного центрального колеса 14 с внутренними зубьями планетарной эксцентриковой передачи. Внутренние зубья колеса 14 находятся в зацеплении с наружными зубьями сателлита 15. подвижно смонтированного на эксцентрике 16 эксцентриковой втулки 6. Сателлит 15 снабжен пальцами 17, концы которых размещены в ответных (Гнездах 18 крышки 2 корпуса 1 дифференциала. В теле эксцентриковой втулки 6 выполнены дебалансные отверстия 19.,
Одним из условий нормальной работы дифференциала является то, что гибкое и центральное 14 колеса волновой и планетарной передач должны иметь противоположное направление вращения, т.е. левое и правое, а количество зубьев жесткого центрального колеса 10 и колеса 14 должны быть
0 равны между собой, так же как должны быть равны между собой количество зубьев гибкого зубчатого колеса (7-8) и сателлита 15. При этом количество зубьев на каждом из колес 10 и 14 должно быть больше на два и
5 более количества зубьев, чем на гибком колесе (7-8) и сателлите 15.
Дифференциал транспортного средства работает следующим образом.
При движении автомобиля вперед или назад по прямой линии, а также при попадании одного из ведущих колес на скользкий грунт или его зависании в воздухе, вращение от корпуса 1 дифференциала и 5 соединенной с ним крышки 2 передается на неподвижно закрепленное в корпусе жесткое колесо 10 и находящееся с ним в зацеплении гибкое колесо, состоящее из сочлененных сегментов 7 и 8, и далее через
0 тела 11 качения вращение передается на Элиптический генератор 5 волн и закрепленную внутри него полуось 3. Одновременно вращение от крышки 2 дифференциала передается на правой полуоси 4 через пальцы
5 17 на сателлит 15, от которого вращение передается в двух направлениях; на эксцентрик 16 втулки 6 и закрепленную внутри ее полуось 4 и на центральное колесо 14, находящееся в зацеплении с сателлитом 15, и
0 далее от колеса 14 вращение передается на волновую передачу через пальцы 9. концы которых размещены в цилиндрических отверстиях 13 колеса 14. При этом все подвижные элементы внутри корпуса дифференциала относительно друг друга не вращаются и работают как одно целое.
При движении автомобиля вперед или назад и, если происходит тор;иожение двигателем, то крутящий момент от колес мобиля передается в обратном направ-..
лении и корпус дифференциала и полуоси 3
и 4 в этом случае вращаются как одно целое.
При повороте автомобиля, например,
влево полуоси 3 и 4 будут вращаться с раз5 личными частотами: полуось 3 по отношению к корпусу 1 получает отстающее вращение, а полуось 4 - обгонное. В процессе отставания полуоси 3 относительно кор- . пуса 1 за счет волнового эффекта сегменты.
0 7 и 8 гибкого колеса будут отставать за каждый оборот от колеса 10 на разность их зубьев. При разнице в числах зубьев колеса 10 и сегментов 7 и 8 гибкого колеса, равной двум, последнее за один полный оборот генератора 5 волн повернется в противопо360°
ложную сторону на угол р
где Zio tp- угол поворота гибкого колеса;
Zio - число зубьев колеса 10.
При повороте автомобиля влево правая полуось 4 получит обгонное вращение. Одновременно с полуосью 4 внутри сателлита 15 будет вращаться эксцентрик 16 втулки 6.При этом за счет эксцентриситета зубья сателлита 15 будут входить в зацепление с зубьями колеса 14 и будут их обкатывать. Но так как количество зубьев сателлита 15 и колеса 14 не равны между собой и колесо 14 имеет больщеё количество зубьев, например, на два зуба, то за один оборот полуоси 4 вокруг оси колеса 14 последнее будет опережать корпус 1 на эти два зуба {так как сателлит вращаться вокруг своей оси не может, а только соверщает вертикальные колебания, в пределах двух величин эксцентриситета, поскольку скрепленные с сателлитом 15 пальцы 17 ограничены в своем движении ответными гнездами 18, выполненными в теле крышки 2 дифференциала). Таким образом за один оборот полуоси 4 колесо 14 будет опережать корпус
360° 1 на угОл 2 -у- гдеуь угол поворота
колеса 14;
Zi4 - число зубьев колеса 14.
Поэтому при повороте автомобиля влево состоящее из сочлененных шарнирных сегментов 7 и 8 гибкоеколесо, блокирующее (связывающее) между собой волновую и планетарную передачи (за счет взаимодействия пальцев 9 с колесом 14). получает обгонное вращение так же, как и колесо 14. относительно корпуса 1 на угол, равосл о
ный 2 у . и не препятствует колесам
автомобиля производить поворот на криволинейных участках пути.
Одной изособенностей дифференциала является то, что его механизм работает только в том случае, когда одно из колес автомобиля соверщает обгонное вращение, а другое колесо совершает отстающее вращение на эту же величину. В остальных слу,чаях передача находится в заблокированном состоянии, даже если одно из колес будет находиться на скользком грунте или зависнет в воздухе. Пробуксовка одного из колес автомобиля возможна лишь на
внутреннем колесе при движении автомобиля по криволинейному пути и попадании колеса на скользкий грунт. При этом пробуксовка внутреннего ведущего колеса не будет превышать величины разности угловых частот вращения забегающего и отстающего колес, т.е. полуоси 3 и 4 будут вращаться с одной частотой. Отсутствие в дифференциале заклинивающихся блокировочных деталей позволяет ему мгновенно перераспределять крутящий момент на ту полуось, у которой большее сцепление с грунтом, что делает дифференциал практически безынерционным. Из-за незначительной разности между количеством зуЬьев сегментов 7
и 8 гибкого колеса и жесткого колеса 10
волновой бортовой передачи, а также между
колесом 14 и сателлитом 15 планетарной
передачи достигается их высокий (до 250)
коэффициент блокировки. Многопарность зацепления кОлес в передачах снижает нагрузку, приходящуюся на каждый зуб., уменьшает их износ, повышает плавность работы.
Применние предлагаемого изобретения позволяет упростить конструкцию дифференциала транспортного средства, повысить надежность и долговечность его работы, сократить габариты, не уменьшив
при этом его нагрузочную способность, что в конечном счете приводит к повышению безопасности автомобиля, уменьшению расхода горюче-смазочных материалов. Формула изобретения
Дифференциал транспортного средства, содержащий приводной корпус, внутри которого соосно друг другу установлены полуОси, планетарная эксцентриковая и волновая зубчатые передачи, посредством
которых полуоси кинематически связаны между собой и-корпусом. отличающийс я тем. 4to. с целью повышения долговечности работы и сокращения габаритов, в центральном колесе планетарной эксцентрико&ой передачи выполнены цилиндрические гнезда, размещенные равномерно по окружности соосно полуосям, а гибкое колесо волновой зучатой передачи выполнено из сочленных зубчатых сегментов, каждый из
которых имеет палец для взаимодействия с гнездами.
л-А
У
Фиг. 1
Физ.З 5Фаг46
Фиг 6
| Дифференциал транспортного средства | 1986 |
|
SU1361038A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
