Изобретение относится к транспортному и сельскохозяйственному машиностроению, в частности к системам управления транспортными средствами.
Цель изобретения - повышение безопасности движения транспортного средства при по вороте.
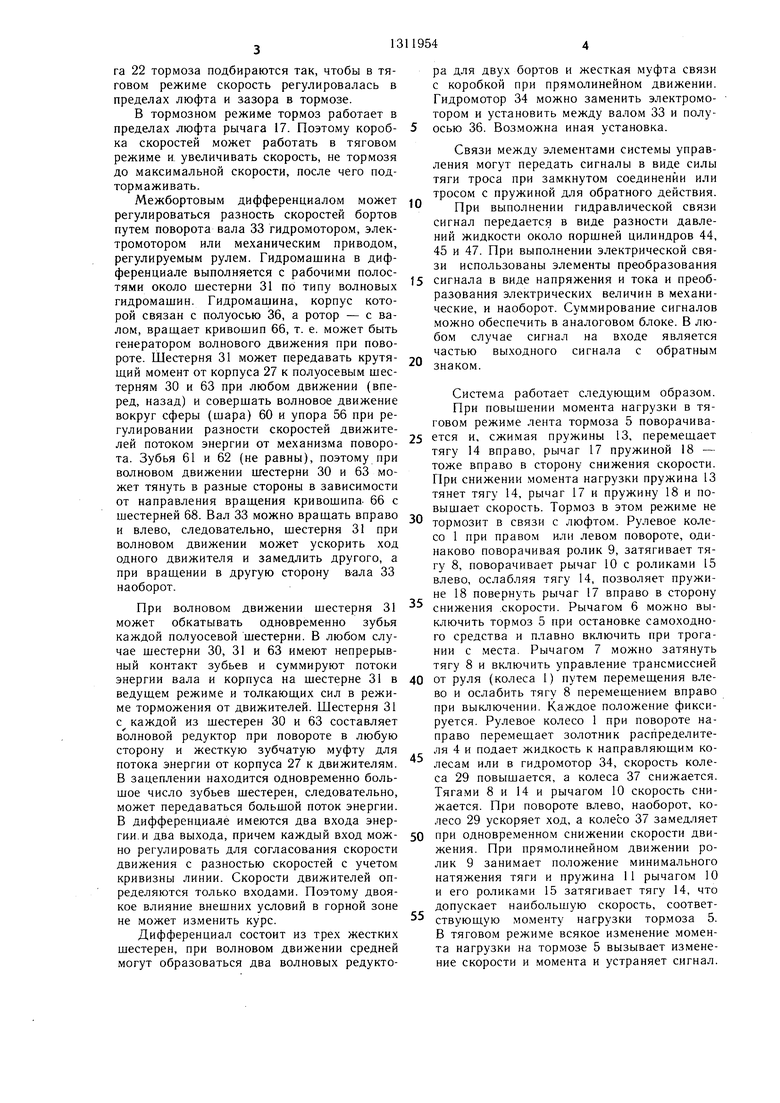
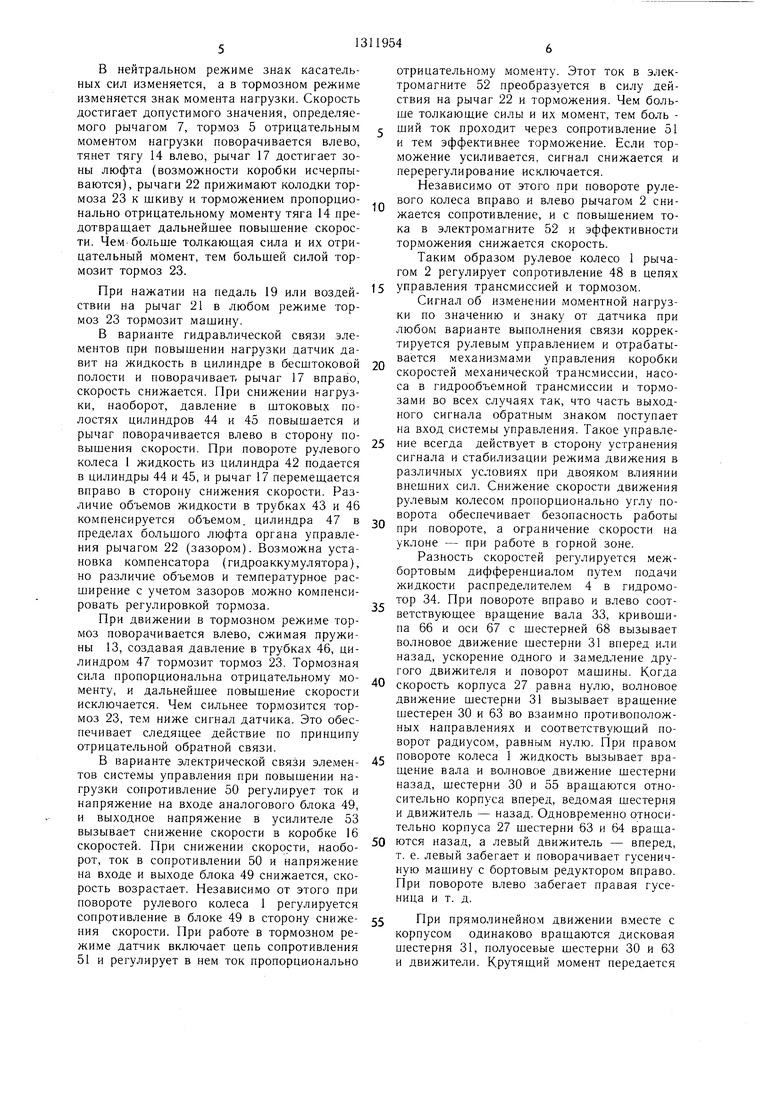
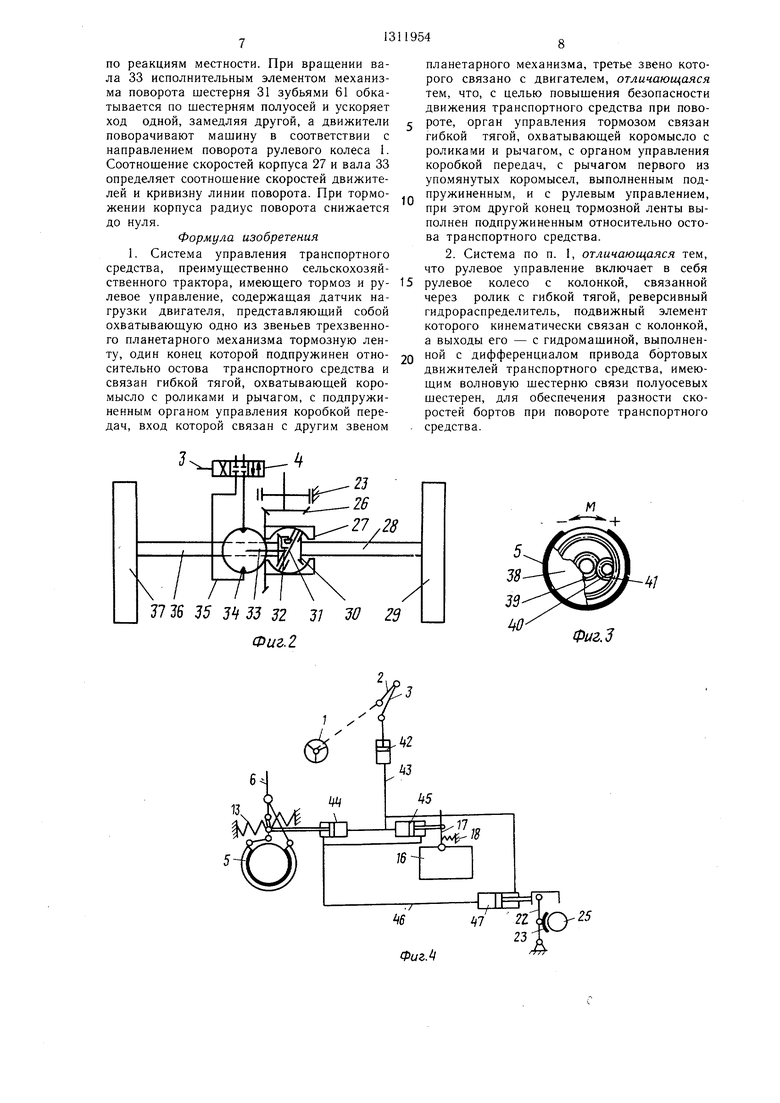
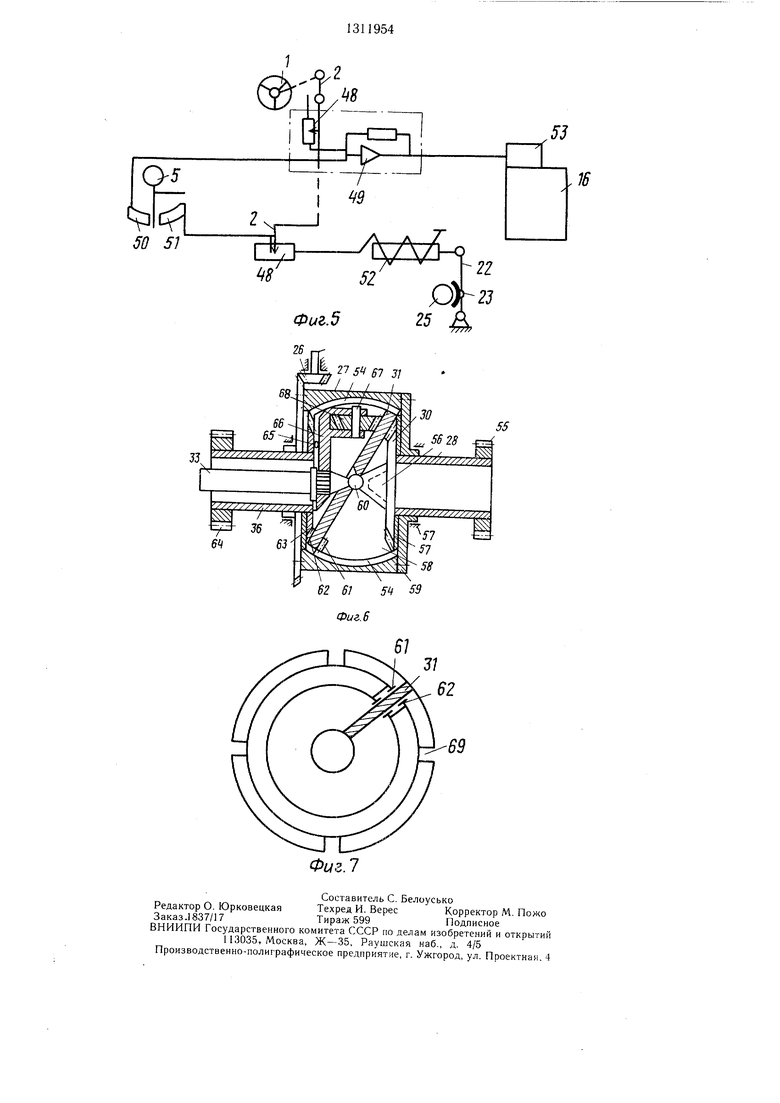
На фиг. 1 показана система управления транспортного средства, вариант механической связи рулевого управления с трансмиссией и тормозным приводом; на фиг. 2 - схема исполнительного элемента механизма поворота в виде дифференциала с шестерней волнового движения; на фиг. 3 - схема датчика момента нагрузки в виде планетарного механизма, работаюш,его в качестве муфты сцепления (направление моментов обозначено знаками плюс и минус); на фиг. 4 - предлагаемая система, вариант гидравлической связи элементов системы управления; на фиг. 5 - то же, вариант электрической связи э;)ементов управления; на фиг. 6 - схема дифференциала с шестерней волнового движения в период поворота; на фиг. 7 - схема шестерни волнового движения.
Система управления транспортного средства содержит рулевое колесо 1, рычаг 2, тягу 3 связи с распределителем 4, тормоз 5 с рычагом 6 управления, рычаг 7 управления тяги 8, пропущенной через ролик 9 и соединенной с рычагом 10, пружину 11, колодку 12 - держатель рычага 6, пружины 13 связи с рамой, гибкую тягу 14, пропущенную через ролики 15, коробку 16 скоростей с рычагом 17 и пружиной 18 управления, педаль 19 поворота роликов 20 и рычаг 21 управления рычагом 22 тормоза 23, пружину 24 и шкив 25 тормоза трансмиссии, главную передачу 26 в виде двух конических шестерен привода корпуса 27 дифференциала, полуось 28 колеса 29, полуосевую шестерню 30, связанную с зубьями шестерни 31, ролик 32 на валу 33 гидромотора 34, трубками 35 связанного с распределителем, и полуось 36 колеса 37.
Датчик момента нагрузки имеет тормоз 5 шкива 38 солнечной шестерни 39, приводимой сателлитом 40 от коронной шестерни 41 двигателя.
Гидравлическая связь между элементами системы включает в себя гидроцилиндр 42, связанный трубками 43 с гидроцилиндрами 44 и 45 датчика и управления коробки 16, трубку 46 связи датчика и руля с гидроцилиндром 47 привода тормоза 23 (фиг. 4). При электрической связи элементов системы управлени5 (фиг. 5) около датчика нагрузки имеется рычаг-движок сопротивлений 48 аналогового блока 49 суммирования сигналов датчика и руля 1, а также сопротивления 50 и 51 в виде реостатов, электромагнит 52 управления тормозом и
0
5
0
5
0
5
0
5
0
5
усилитель 53 управления коробкой 16 скоростей. Следящая связь элементов системы управления может быть выполнена из пнев- моприводных средств с питанием от пневмо- системы тормозов.
Межбортовой дифференциал (фиг. 6) в корпусе 27 имеет зубья 54 для передач крутящего момента двойной шестерне 31, постоянно связанной с шестерней 30 полуоси 28 с шестерней 55 бортового редуктора, упор 56, подшипники 57, полость 58 для волнового движения шестерни 31, крышку 59, шаровой конец 60, зубья 61 и 62 (фиг. 7),полуосевую шестерню 63 полуоси 36 с шестерней 64 другого бортового редуктора. В дифференциале установлены также подшипник 65, кривошип 66 с осью 67, на которой размещена шестерня 68, имеются пазы 69 для зубьев 54 корпуса 27. Система управления содержит двигатель, тормоза колес, фиксаторы рычагов и педали, соединительные детали и регулировочные гайки, как известные системы.
Рычаг 6 может включить и выключить тормоз 5, рычаг 7 - включить и выключить связь с рулевым колесом 1 тяги 8 и рычага 10, им можно вручную тормозить и регулировать степень влияния руля на трансмиссию и тормоз, рычаг 7 также может работать в качестве ручного задатчика скорости. Тормоз 5 относительно рамы может поворачиваться вправо положительным крутящим моментом и влево отрицательным (фиг. 3). Рулевое колесо 1 может управлять распределителем 4 для поворота направляющих колес и подачи жидкости в гидромотор 34 для регулирования разности скоростей колесной и гусеничной машин при повороте. Одновременно рулевое колесо 1, поворачивая рычаг 2 с роликом 9, может при повороте влево и вправо сильнее затянуть гибкую тягу 8 (трос) и через рычаг 10 регулировать натяжение гибкой тяги 14 управления коробкой 16. Педалью 19 и рычагом 21 можно затянуть тягу 14 и повернуть рычаги 22 влево при торможении. Пружины сжатия 11, 24 и 13 и растяжения 18, поддерживая натяжение гибких тяг 8 и 14, могут поворачивать рычаги в обратную сторону. В качестве коробки скоростей можно использовать любое средство регулирования передаточного числа, включая насос с регулируемым объемом рабочих полостей гидрообъемной трансмиссии. Рычаг 17 является органом управления, имеет люфт в левом и правом конечных положениях и может включить скорость. Рычаг 10 имеет педаль для ножного управления при работе в качестве ножного акселератора скорости при отключении автоматического управления или желании водителя управлять.
При ручном и автоматическом управлении люфт рычага 17 коробки и зазор рычага 22 тормоза подбираются так, чтобы в тяговом режиме скорость регулировалась в пределах люфта и зазора в тормозе.
В тормозном режиме тормоз работает в пределах люфта рычага 17. Поэтому коробка скоростей может работать в тяговом режиме и увеличивать скорость, не тормозя до максимальной скорости, после чего подтормаживать.
Межбортовым дифференциалом может регулироваться разность скоростей бортов путем поворота вала 33 гидромотором, электромотором или механическим приводом, регулируемым рулем. Гидромашина в дифференциале выполняется с рабочими полостями около шестерни 31 по типу волновых гидромашин. Гидромашина, корпус которой связан с полуосью 36, а ротор - с валом, вращает кривошип 66, т. е. может быть генератором волнового движения при повороте. Шестерня 31 может передавать крутящий момент от корпуса 27 к полуосевым шестерням 30 и 63 при любом движении (вперед, назад) и совершать волновое движение вокруг сферы (шара) 60 и упора 56 при регулировании разности скоростей движителей потоком энергии от механизма поворота. Зубья 61 и 62 (не равны), поэтому при волновом движении шестерни 30 и 63 может тянуть в разные стороны в зависимости от направления вращения кривошипа. 66 с шестерней 68. Вал 33 можно вращать вправо и влево, следовательно, шестерня 31 при волновом движении может ускорить ход одного движителя и замедлить другого, а при вращении в другую сторону в-ала 33 наоборот.
При волновом движении шестерня 31 может обкатывать одновременно зубья каждой полуосевой шестерни. В любом случае шестерни 30, 31 и 63 имеют непрерывный контакт зубьев и суммируют потоки энергии вала и корпуса на шестерне 31 в ведушем режиме и толкающих сил в режиме торможения от движителей. Шестерня 31 с каждой из шестерен 30 и 63 составляет волновой редуктор при повороте в любую сторону и жесткую зубчатую муфту для потока энергии от корпуса 27 к движителям. В зацеплении находится одновременно большое число зубьев шестерен, следовательно, может передаваться большой поток энергии. В дифференциале имеются два входа энергии, и два выхода, причем каждый вход можно регулировать для согласования скорости движения с разностью скоростей с учетом кривизны линии. Скорости движителей определяются только входами. Поэтому двоякое влияние внешних условий в горной зоне не может изменить курс.
Дифференциал состоит из трех жестких шестерен, при волновом движении средней могут образоваться два волновых редуктора для двух бортов и жесткая муфта связи с коробкой при прямолинейном движении. Гидромотор 34 можно заменить электромотором и установить между валом 33 и полу- осью 36. Воз.можна иная установка.
Связи между элементами системы управления могут передать сигналы в виде силы тяги троса при замкнутом соединении или тросом с пружиной для обратного действия.
При выполнении гидравлической связи сигнал передается в виде разности давлений жидкости около поршней цилиндров 44, 45 и 47. При выполнении электрической связи использованы элементы преобразования
сигнала в виде напряжения и тока и преобразования электрических величин в механические, и наоборот. Суммирование сигналов можно обеспечить в аналоговом блоке. В любом случае сигнал на входе является частью выходного сигнала с обратным
знаком.
Система работает следующим образом. При повышении момента нагрузки в тяговом режиме лента тормоза 5 поворачивается и, сжимая пружины 13, перемещает тягу 14 вправо, рычаг 17 пружиной 18 - тоже вправо в сторону снижения скорости. При снижении момента нагрузки пружина 13 тянет тягу 14, рычаг 17 и пружину 18 и повышает скорость. Тормоз в этом режиме не
тормозит в связи с люфтом. Рулевое колесо 1 при правом или левом повороте, одинаково поворачивая ролик 9, затягивает тягу 8, поворачивает рычаг 10 с роликами 15 влево, ослабляя тягу 14, позволяет пружине 18 повернуть рычаг 17 вправо в сторону
снижения скорости. Рычагом 6 можно выключить тормоз 5 при остановке самоходного средства и плавно включить при трога- НИИ с места. Рычагом 7 можно затянуть тягу 8 и включить управление трансмиссией
от руля (колеса 1) путем перемещения влево и ослабить тягу 8 перемещением вправо при выключении. Каждое положение фиксируется. Рулевое колесо 1 при повороте направо перемещает золотник распределителя 4 и подает жидкость к направляющим колесам или в гидромотор 34, скорость колеса 29 повышается, а колеса 37 снижается. Тягами 8 и 14 и рычагом 10 скорость снижается. При повороте влево, наоборот, колесо 29 ускоряет ход, а колесо 37 замедляет
при одновременном снижении скорости движения. При прямолинейном движении ролик 9 занимает положение минимального натяжения тяги и пружина 11 рычагом 10 и его роликами 15 затягивает тягу 14, что допускает наибольшую скорость, соответствующую моменту нагрузки тормоза 5. В тяговом режиме всякое изменение момента нагрузки на тор.мозе 5 вызывает изменение скорости и момента и устраняет сигнал.
В нейтральном режиме знак касательных сил изменяется, а в тормозном режиме изменяется знак момента нагрузки. Скорость достигает допустимого значения, определяемого рычагом 7, тормоз 5 отрицательным моментом нагрузки поворачивается влево, тянет тягу 14 влево, рычаг 17 достигает зоны люфта (возможности коробки исчерпьг- ваются), рычаги 22 прижимают колодки тормоза 23 к шкиву и торможением пропорционально отрицательному моменту тяга 14 предотвращает дальнейшее повышение скорости. Чем-больше толкающая сила и их отрицательный момент, тем большей силой тормозит тормоз 23.
При нажатии на педаль 19 или воздействии на рычаг 21 в любом режиме тормоз 23 тормозит машину.
В варианте гидравлической связи элементов при повышении нагрузки датчик давит на жидкость в цилиндре в бесштоковой полости и поворачивает, рычаг 17 вправо, скорость снижается. При снижении нагрузки, наоборот, давление в штоковых полостях цилиндров 44 и 45 повышается и рычаг поворачивается влево в сторону повышения скорости. При повороте рулевого колеса 1 жидкость из цилиндра 42 подается в цилиндры 44 и 45, и рычаг 17 перемешается вправо в сторону снижения скорости. Различие объемов жидкости в трубках 43 и 46 компенсируется объемом, цилиндра 47 в пределах большого люфта органа управления рычагом 22 (зазором). Возможна установка компенсатора (гидроаккумулятора), но различие объемов и температурное расширение с учетом зазоров можно компенсировать регулировкой тормоза.
При движении в тормозном режиме тормоз поворачивается влево, сжимая пружины 13, создавая давление в трубках 46, цилиндром 47 тормозит тормоз 23. Тормозная сила пропорциональна отрицательному моменту, и дальнейшее повышение скорости исключается. Чем сильнее тормозится тормоз 23, тем ниже сигнал датчика. Это обеспечивает следящее действие по принципу отрицательной обратной связи.
В варианте электрической связи элементов системы управления при повышении нагрузки сопротивление 50 регулирует ток и напряжение на входе аналогового блока 49, и выходное напряжение в усилителе 53 вызывает снижение скорости в коробке 16 скоростей. При снижении скорости, наоборот, ток в сопротивлении 50 и напряжение на входе и выходе блока 49 снижается, скорость возрастает. Независимо от этого при повороте рулевого колеса 1 регулируется сопротивление в блоке 49 в сторону снижения скорости. При работе в тормозном режиме датчик включает цепь сопротивления 51 и регулирует в нем ток пропорционально
0
5
0
5
отрицательно.му моменту. Этот ток в электромагните 52 преобразуется в силу действия на рычаг 22 и торможения. Чем больше толкающие силы и их момент, тем боль - ший ток проходит через сопротивление 51 и те.м эффективнее торможение. Если торможение усиливается, сигнал снижается и перерегулирование исключается.
Независимо от этого при повороте рулевого колеса вправо и влево рычагом 2 снижается сопротивление, и с повышением тока в электро.магните 52 и эффективности торможения снижается скорость.
Таким образом рулевое колесо 1 рычагом 2 регулирует сопротивление 48 в цепях управления трансмиссией и тормозом.
Сигнал об изменении моментной нагрузки по значению и знаку от датчика при любом варианте выполнения связи корректируется рулевым управлением и отрабатывается механизмами управления коробки скоростей механической транс.миссии, насоса в гидрообъемной трансмиссии и тормозами во всех случаях так, что часть выходного сигнала обратным знаком поступает на вход системы управления. Такое управление всегда действует в сторону устранения сигнала и стабилизации режима движения в различных условиях при двояком влиянии внешних сил. Снижение скорости движения рулевым колесом пропорционально углу поворота обеспечивает безопасность работы при повороте, а ограничение скорости на уклоне - при работе в горной зоне.
Разность скоростей регулируется межбортовым дифференциалом путем подачи жидкости распределителем 4 в гидро.мо- тор 34. При повороте вправо и влево соответствующее вращение вала 33, кривошипа 66 и оси 67 с шестерней 68 вызывает волновое движение шестерни 31 вперед или назад, ускорение одного и замедление другого движителя и поворот машины. Когда скорость корпуса 27 равна нулю, волновое движение шестерни 31 вызывает вращение шестерен 30 и 63 во взаимно противоположных направлениях и соответствующий поворот радиусом, равным нулю. При правом повороте колеса 1 жидкость вызывает вращение вала и волновое движение шестерни назад, шестерни 30 и 55 врашаются относительно корпуса вперед, ведо.мая шестерня и движитель - назад. Одновре.менно относительно корпуса 27 шестерни 63 и 64 вращаются назад, а левый движитель - вперед, т. е. левый забегает и поворачивает гусеничную мащину с бортовым редуктором вправо. При повороте влево забегает правая гусеница и т. д.
5 При прямолинейном движении в.месте с корпусом одинаково вращаются дисковая шестерня 31, полуосевые шестерни 30 и 63 и движители. Крутящий момент передается
0
5
0
5
0
по реакциям местности. При вращении вала 33 исполнительным элементом механизма поворота шестерня 31 зубьями 61 обкатывается по шестерням полуосей и ускоряет ход одной, замедляя другой, а движители поворачивают машину в соответствии с направлением поворота рулевого колеса 1 Соотношение скоростей корпуса 27 и вала 33 определяет соотношение скоростей движителей и кривизну линии поворота. При торможении корпуса радиус поворота снижается до нуля.
Формула изобретения 1. Система управления транспортного средства, преимушественно сельскохозяйственного трактора, имеющего тормоз и рулевое управление, содержащая датчик нагрузки двигателя, представляющий собой охватывающую одно из звеньев трехзвенно- го планетарного механизма тормозную ленту, один конец которой подпружинен относительно остова транспортного средства и связан гибкой тягой, охватывающей коромысло с роликами и рычагом, с подпружиненным органом управления коробкой передач, вход которой связан с другим звеном
планетарного механизма, третье звено которого связано с двигателем, отличающаяся тем, что, с целью повышения безопасности движения транспортного средства при пово- 5 роте, орган управления тормозом связан гибкой тягой, охватывающей коромысло с роликами и рычагом, с органом управления коробкой передач, с рычагом первого из упомянутых коромысел, выполненным под- Q пружиненным, и с рулевым управлением при этом другой конец тормозной ленты выполнен подпружиненным относительно остова транспортного средства.
2. Система по п. 1, отличающаяся тем, что рулевое управление включает в себя 5 рулевое колесо с колонкой, связанной через ролик с гибкой тягой, реверсивный гидрораспределитель, подвижный элемент которого кинематически связан с колонкой, а в ыходы его - с гидромашиной, выполнен- 0 ной с дифференциалом привода бортовых движителей транспортного средства, имеющим волновую шестерню связи полуосевых шестерен, для обеспечения разности скоростей бортов при повороте транспортного средства.
7 б J5 J JJ J2 j; W 23 Фиг.2
+
Фиг.д
5
Ftiw
7
23
50 51
8
JJ
16
52
У -22
Фиг.5
, 27 5V S7 31
Ч I /
Л n 61 54 53
Фиг. 6
7/
ФигЛ
Составитель С. Белоусько
Редактор О. ЮрковецкаяТехред И. ВересКорректор М. Пожо
Заказ.1837/17Тираж 599Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открыти :
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4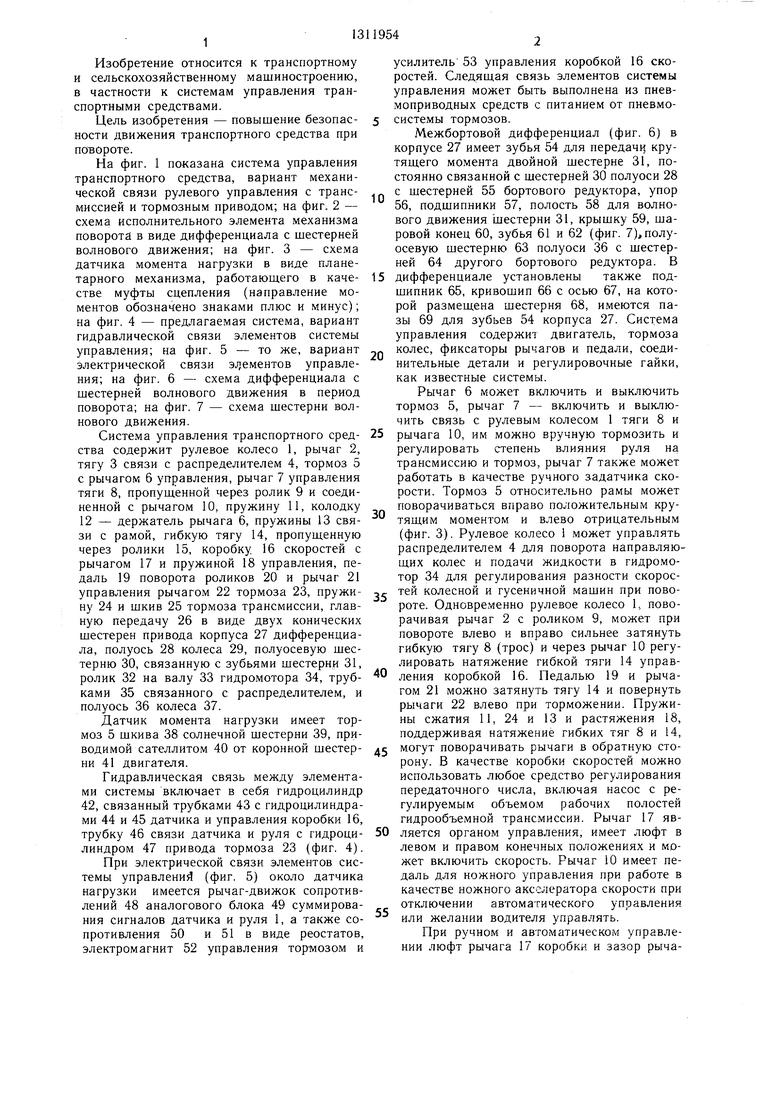
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| Транспортное средство | 1982 |
|
SU1092061A1 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2472951C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
Изобретение относится к транспортному и сельскохозяйственному машиностроению. Цель - повышение безопасности движения транспортного средства при повороте. В системе управления рулевое колесо 1 связано с датчиком нагрузки рычагами 17 регулирования передаточного числа трансмиссии и тормозной системой с воз.можностью снижения скорости и торможения пропорционально кривизне линии поворота и толкающей силе. Дифференциал между полуосевыми шестерня.ми содержит одну двойную шестерню, установленную с возможностью волнового движения при регулировании разности скоростей. Сигнал об изменении нагрузки на выходе трансмиссии обратным знако.м вводится в механизмы управления и торможения с учетом угла поворота рулевого колеса 1. При движении в тяговом, нейтральном и тормозном режимах пропорционально кривизне линии поворота снижается скорость, причем на уклоне торможение осуществляется пропорционально повороту рулевого колеса 1 и отрицательному моменту от толкающих сил. Часть выходного сигнала нагрузки и торможения обратным знаком проходит через рулевое колесо 1 и корректируется для ввода на вход управления. 1 з. п. ф-лы, 7 ил. I СО 678 со о сд 4 
| Трансмиссия транспортного средства | 1981 |
|
SU1079477A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
