СЯ СП
1C
оэ
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля логических устройств | 1989 |
|
SU1709256A1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| Устройство для непрерывного диагностирования линейных динамических систем | 1988 |
|
SU1624454A1 |
| ПРИЕМНОЕ УСТРОЙСТВО ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1983 |
|
SU1840292A1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ ПРИ ПЕРЕДАЧЕ И ПРИЕМЕ ШИРОКОПОЛОСНОГО СИГНАЛА С РАСШИРЕНИЕМ СПЕКТРА | 1998 |
|
RU2127021C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСВЯЗИ | 1980 |
|
SU1840131A1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| УСТРОЙСТВО ПОИСКА ШУМОПОДОБНЫХ СИГНАЛОВ | 1983 |
|
SU1840127A1 |
| УСТРОЙСТВО СВЯЗИ | 1999 |
|
RU2185033C2 |
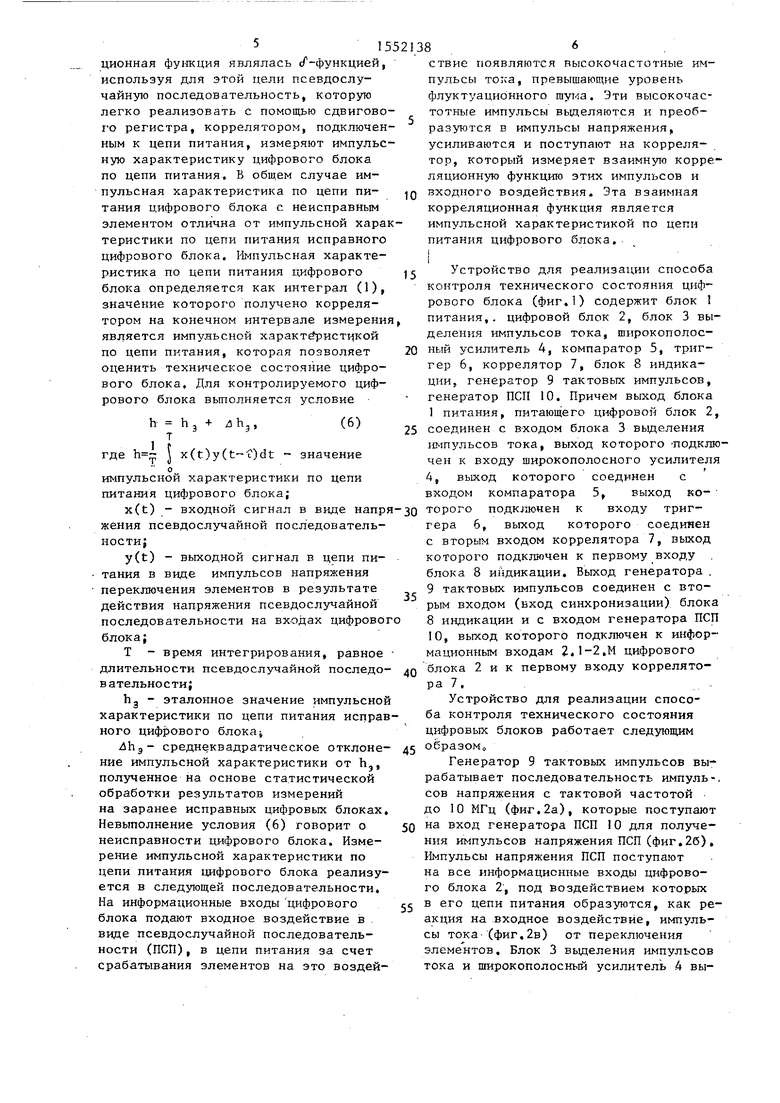
Изобретение относится к вычислительной технике и может быть использовано, в частности, в процессе ее эксплуатации и в процессе проведения входного контроля цифровой элементной базы, а также при производстве цифровых систем. Цель изобретения - повышение достоверности определения технического состояния цифровых блоков. На контролируемый цифровой блок 2 подаются напряжение питания от блока 1 питания и тестовые воздействия от генератора 10 псевдослучайной последовательности, управляемого генератором 9 тактовых импульсов. Блок 3 выделения импульсов тока обеспечивает выделение высокочастотных импульсов, возникающих в цепи питания при работе цифрового блока 2. Эти импульсы усиливаются широкополосным усилителем 4, обрабатываются компаратором 5 и триггером 6. Коррелятор 7 формирует импульсную характеристику цифрового блока 2, которая служит информативным параметром и выводится для сравнения с эталоном на блок 8 индикации. 4 ил.
фие.1
315
Изобретение относится к вычисли- тельной технике и может быть исполь- зовано., в частности, в процессе ее эксплуатации и в процессе проведе- лия входного контроля цифровой элементной базы, а также при производстве цифровых систем.
Цель изобретения - повышение достоверности контроля технического со- стояния цифровых блоков.
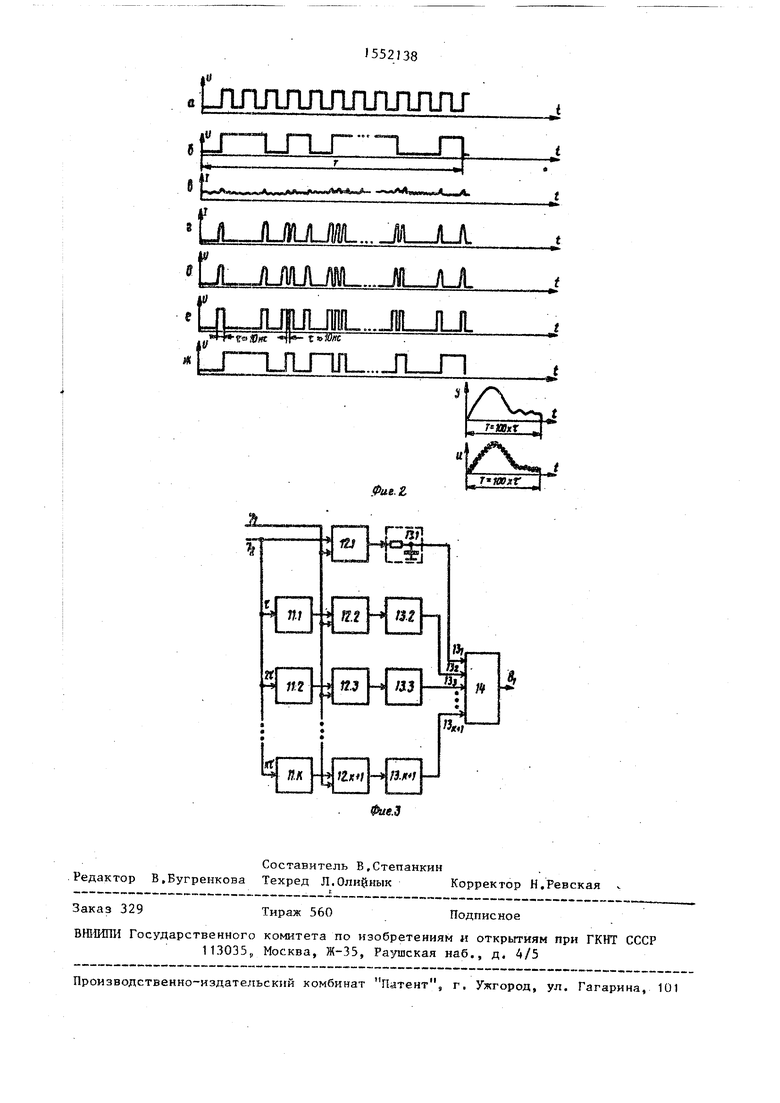
На фиг.1 приведена е5лок-схема устройства для реализации способа; на фиг.2 - эпюры, поясняющие работу устройства; на фиг.З - блок-схема ко релятора.
Способ основан на применении теории Мура, с помощью которой можно вычислить с достаточной степенью точности, ограниченной лишь шумами из- мерительных приборов, импульсную характеристику для произвольной кинетической модели по характеристикам входного заданного тестового сигнала Любая система, также и нели- нейная с учетом метода линеаризации в окрестности рабочей точки, описывается импульсной характеристикой.
Переходный процесс цифрового блок определяет изменение не одного, а со вокупности параметров, характеризующих цифровой блок. Известно, что такой процесс является наиболее информативным и может повысить достове ность контроля цифровых блоков. Это объясняется тем, что переходной процесс представляет собой динамический режим работы диагностируемого
Известно, что реакция линейной сиетемы на любое входное воздействие оп- 30 Цифрового блока, в котором наиболее
ределяется с помощью интеграла Дгоаполно появляется истинный уровень его технического состояния. Импульс ная характеристика является индивидуальной функцией технического сост ния цифрового блока в смысле объеди нения в себе совокупности значений отдельных параметров, характеризующих техническое состояние цифрового блока, с ее помощью можно оценивать степень его работоспособности
о
h(t C)x(1) dC.
(1) символически, полу
x(t) h(t),
(О
(2)
где y(t) - реакция линейной системы
на входное воздействие; x(t) - входное воздействие; t - время;
С параметр интегрирования; h(t) - импульсная характеристика
линейной системы. Пусть R (С) - автокорреляционная функция входного воздействия (сигнала) x(t);
Кич.( С) взаимная корреляцией
ная функция входного и выходного сигналов „ Эти функции связаны тем же уравнением свертки (2), что и сигнал
(C)h(O. (3)
R,
,()
X, V V / Х,х
Если RXX(C) заменить функций Дирака Г(Ј), то из определения импульсной характеристики линейной системы, как реакции на -функцию этой сис
выражение (3) приводится к ви,У
(С) f()h(C)h().
(4)
темы ДУ R
Итак, если автокорреляционная функция входного сигнала ведет себя как (/ -функция, то взаимная корреляционная функция входного и выходного сигналов является импульсной характеристикой линейной системы Этот метод определения импульсной характеристики применим к нелинейным системам (цифровым блокам) и дает возможность измерять их динамические характерис- тики в рабочей точке. Импульсная характеристика является результатом анализа переходного процесса цифрового блока.
Переходный процесс цифрового блока определяет изменение не одного, а совокупности параметров, характеризующих цифровой блок. Известно, что такой процесс является наиболее информативным и может повысить достоверность контроля цифровых блоков. Это объясняется тем, что переходной процесс представляет собой динамический режим работы диагностируемого
Цифрового блока, в котором наиболее
полно появляется истинный уровень его технического состояния. Импульсная характеристика является индивидуальной функцией технического состояния цифрового блока в смысле объединения в себе совокупности значений отдельных параметров, характеризующих техническое состояние цифрового блока, с ее помощью можно оценивать степень его работоспособности
w tJL.
« 1
(5)
где W - степень работоспособности
цифрового блока; Ьм - нормированное значение импульсной характеристики цифрового блока. Импульсная характеристика цифрового блока по цепи питания определяется как взаимная корреляционная функция входного тестового сигнала цифрового блока и выходного сигнала в цепи питания, который представляет собой реакцию в виде высокочастотных импульсов тока переключения элементов цифрового блока на входное воздействие. Задавая входное воздействие такое, чтобы его автокорреля5155
ционная функция являлась (/ -функцией, используя для этой цели псевдослучайную последовательность, которую легко реализовать с помощью сдвигового регистра, коррелятором, подключенным к цепи питания, измеряют импульсную характеристику цифрового блока по цепи питания. В обшем случае импульсная характеристика по цепи пи- тания цифрового блока с неисправным элементом отлична от импульсной характеристики по цепи питания исправного цифрового блока. Импульсная характеристика по цепи питания цифрового блока определяется как интеграл (1), значение которого получено коррелятором на конечном интервале измерения является импульсной характеристикой по цепи питания, которая позволяет оценить техническое состояние цифрового блока. Для контролируемого цифрового блока выполняется условие
h
т
Ah
1
(6)
«
где h x(t)y()dt - значение
о импульсной характеристики по цепи
питания цифрового блока;
x(t) - входной сигнал в виде напря жения псевдослучайной последовательности;
y(t) - выходной сигнал в цепи питания в виде импульсов напряжения переключения элементов в результате действия напряжения псевдослучайной последовательности на входах цифровог блока;
Т - время интегрирования, равное длительности псевдослучайной последо- вательности;
h3 - эталонное значение импульсной характеристики по цепи питания исправного цифрового блокаj
ЛЬЭ- среднеквадратическое отклонение импульсной характеристики от Ьэ, полученное на основе статистической обработки результатов измерений на заранее исправных цифровых блоках. Невыполнение условия (6) говорит о неисправности цифрового блока. Измерение импульсной характеристики по цепи питания цифрового блока реализуется в следующей последовательности. На информационные входы цифрового блока подают входное воздействие в виде псевдослучайной последовательности (ПСП), в цепи питания за счет срабатывания элементов на это воздей
86
ствие появляются высокочастотные импульсы тока, превышающие уровень флуктуациоиного гаука. Эти высокочастотные импульсы выделяются и преобразуются в импульсы напряжения, усиливаются и поступают на коррелятор, который измеряет взаимную корреляционную функцию этих импульсов и входного воздействия. Эта взаимная корреляционная функция является импульсной характеристикой по цепи питания цифрового блока.
JQ )з 20
25
зо
до
45
0
5
Устройство для реализации способа контроля технического состояния цифрового блока (фиг.1) содержит блок 1 питания,, цифровой блок 2, блок 3 выделения импульсов тока, широкополосный усилитель 4, компаратор 5, триггер 6, коррелятор 7, блок 8 индикации, генератор 9 тактовых импульсов, генератор ПСП 10. Причем выход блока 1 питания, питающего цифровой блок 2, соединен с входом блока 3 выделения импульсов тока, выход которого подключен к входу широкополосного усилителя 4, выход которого соединен с входом компаратора 5, выход которого подключен к входу триггера 6, выход которого соединен с вторым входом коррелятора 7, выход которого подключен к первому входу блока 8 индикации. Выход генератора . 9 тактовых импульсов соединен с вторым входом (ьход синхронизации) блока 8 индикации и с входом генератора ПСП 10, выход которого подключен к информационным входам 2.1-2.М цифрового блока 2 и к первому входу коррелятора 7.
Устройство для реализации способа контроля технического состояния цифровых блоков работает следующим образом
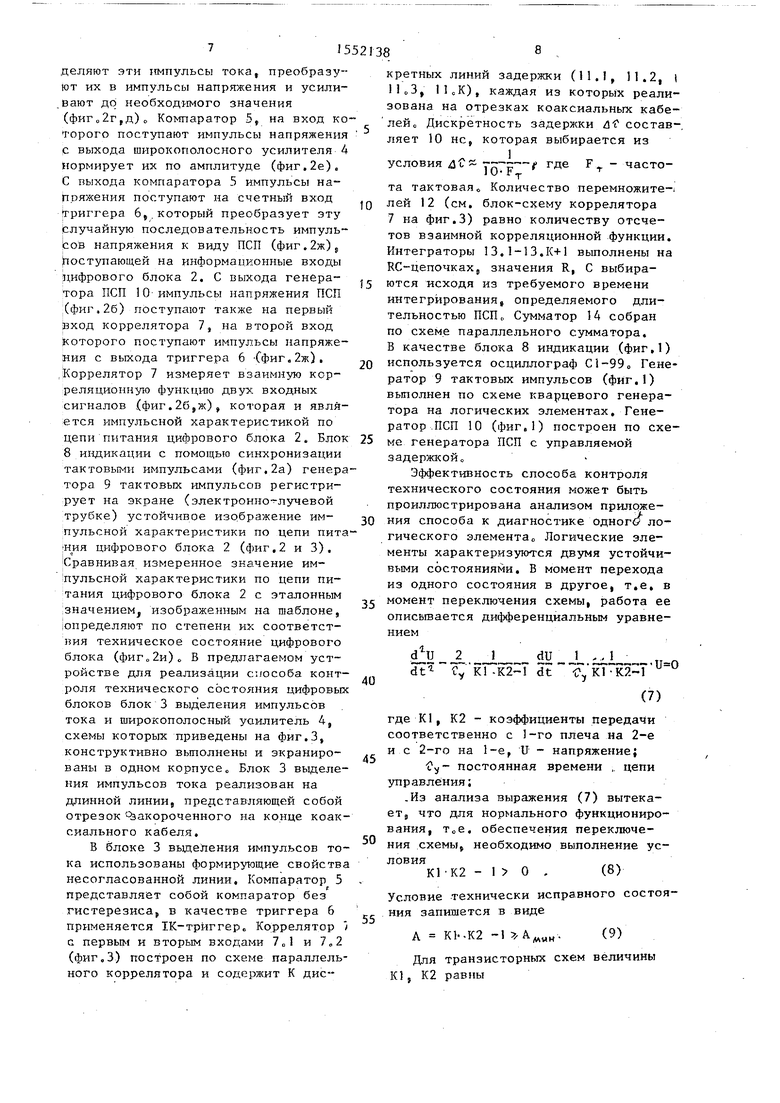
Генератор 9 тактовых импульсов вырабатывает последовательность импуль-. сов напряжения с тактовой частотой до 10 МГц (фиг.2а), которые поступают на вход генератора ПСП 10 для получения импульсов напряжения ПСП (фиг.26), Импульсы напряжения ПСП поступают на все информационные входы цифрового блока 2, под воздействием которых в его цепи питания образуются, как реакция на входное воздействие, импульсы тока (фиг,2в) от переключения элементов. Блок 3 выделения импульсов тока и широкополосный усилитель 4 вы
715
деляют эти импульсы тока, преобразуют их в импульсы напряжения и усиливают до необходимого значения (фиг„2г,д)о Компаратор 5t на вход которого поступают импульсы напряжения с выхода широкополосного усилителя 4 нормирует их по амплитуде (фиг.2е). С выхода компаратора 5 импульсы на- Гшяжения поступают на счетный вход триггера 6f который преобразует эту случайную последовательность импульсов напряжения к виду ПСП (фиг.2ж)8 Поступающей на информационные входы цифрового блока 2. С выхода генератора ПСП 10 импульсы напряжения ПСП (фиг.2б) поступают также на первый Вход коррелятора 7, на второй вход Которого поступают импульсы напряжения с выхода триггера 6 Сфиг„2ж). Коррелятор 7 измеряет взаимную корреляционную функцию двуу входных сигналов (фиг.2б,ж) которая и является импульсной характеристикой по цепи питания цифрового блока 2. Блок 8 индикации с помощью синхронизации тактовыми импульсами (фиг,2а) генератора 9 тактовых импульсов регистрирует на экране (электронно-лучевой трубке) устойчивое изображение им- пульсной характеристики по цепи пита ния цифрового блока 2 (фиг.2 и 3). Сравнивая измеренное значение импульсной характеристики по цепи питания цифрового блока 2 с эталонным
значением изображенным на шаблоне, определяют по степени их соответствия техническое состояние цифрового блока (фиг02и)0 В предлагаемом устройстве для реализации способа контроля технического состояния цифровых блоков блок 3 выделения импульсов тока и широкополосный усилитель 4, схемы которых приведены на фиг.З, конструктивно выполнены и экранированы в одном корпусе,, Блок 3 выделения импульсов тока реализован на длинной линии, представляющей собой отрезок Закороченного на конце коаксиального кабеля.
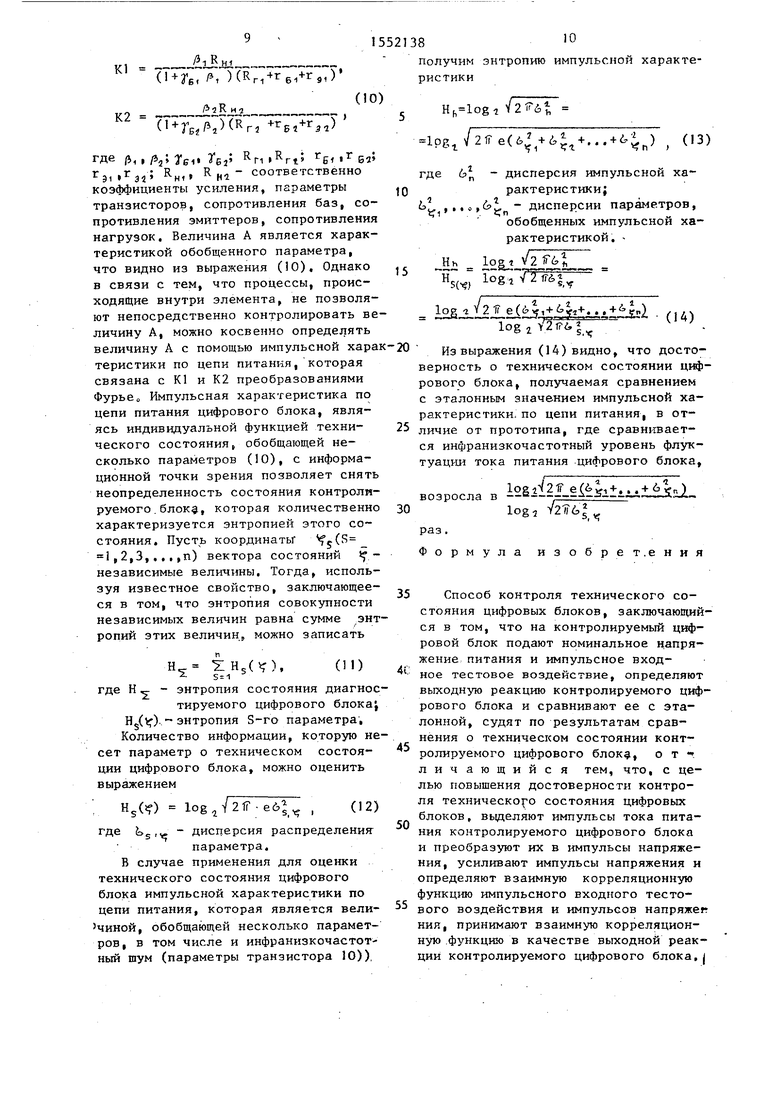
В блоке 3 выделения импульсов тока использованы формирующие свойства несогласованной линии. Компаратор 5 представляет собой компаратор без гистерезиса в качестве триггера 6 применяется IK-триггер. Коррелятор с первым и вторым входами 7„1 и 7„2 (фиг.З) построен по схеме параллельного коррелятора и содержит К дис8
5
0
0
5
F r - частокретных линий задержки (11.1, 11.2, I ПоЗ, 11«К), каждая из которых реализована на отрезках коаксиальных: кабе- лей0 Дискретность задержки и составляет 10 не, которая выбирается из
условия аС гДе 1 U- г т
та тактовая Количество перемножите-, лей 12 (см. блок-схему коррелятора
7на фиг.З) равно количеству отсчетов взаимной корреляционной функции. Интеграторы 13.1-13.IO1 выполнены на RC-цепочках, значения R, С выбираются исходя из требуемого времени интегрирования, определяемого длительностью ПСП„ Сумматор 14 собран по схеме параллельного сумматора.
8качестве блока 8 индикации (фиг,1) используется осциллограф С1-99„ Генератор 9 тактовых импульсов (фиг.1) выполнен по схеме кварцевого генератора на логических элементах. Генератор ПСП 10 (фиг.1) построен по схеме генератора ПСП с управляемой задержкой,,
Эффективность способа контроля технического состояния может быть проиллюстрирована анализом приложения способа к диагностике одного логического элементао Логические элементы характеризуются двумя устойчивыми состояниями. В момент перехода из одного состояния в другое, т.е. в 5 момент переключения схемы, работа ее описывается дифференциальным уравнением
d4U dt
2 JdU
С/К1 -K2-7 dt
(7)
где Kl, K2 - коэффициенты передачи соответственно с 1-го плеча на 2-е и с 2-го на 1-е, U - напряжение;
Су- постоянная времени , цепи управления;
.Из анализа выражения (7) вытекает э что для нормального функционирования, тсе. обеспечения переключения схемьц необходимо выполнение условия,. К1-К2 - 1 0 . (8)
Условие технически исправного состояния запишется в виде
А К1--К2 -1 / Аммм. (9) Для транзисторных схем величины Kl, K2 равны
о+7,
JU.
в, /, )(Rri4r6i+r9i
)
К2
ЛзКна „
т+7e, /Снгг1+r Т)
где г
Pi i TGI
R
КГ1 , R,
ГБ Г Б2
гэ
R urt соответственно
п
ТБЗ lvn п
э 1 з t н 1 коэффициенты усиления, параметры
транзисторов, сопротивления баз, сопротивления эмиттеров, сопротивления нагрузок. Величина А является характеристикой обобщенного параметра, что видно из выражения (Ю). Однако в связи с тем, что процессы, происходящие внутри элемента, не позволяют непосредственно контролировать величину А, можно косвенно определять величину А с помощью импульсной хара теристики по цепи питания, которая связана с К1 и К2 преобразованиями Фурье Импульсная характеристика по цепи питания цифрового блока, являясь индивидуальной функцией технического состояния, обобщающей несколько параметров (10), с информационной точки зрения позволяет снять неопределенность состояния контролируемого блока, которая количественно характеризуется энтропией этого состояния. Пусть координаты (S 1,2,3,.., ,п) вектора состояний - независимые величины. Тогда, используя известное свойство, заключающееся в том, что энтропия совокупности независимых величин равна сумме энтропии этих величин, можно записать
Нт Н5(). (11)
2-
где Н - - энтропия состояния диагностируемого цифрового блокад Hs() -энтропия S-ro параметра, Количество информации, которую несет параметр о техническом состоя- ции цифрового блока, можно оценить выражением
S0)
k«
Н,
loglY2fT.e&Ј.
(12)
где
S
- дисперсия распределения- параметра. В случае применения для оценки технического состояния цифрового блока импульсной характеристики по цепи питания, которая является вели- чиной, обобщающей несколько параметров, в том числе и инфранизкочастотный шум (параметры транзистора 10))
получим энтропию импульсной характеристики
(Ю)
W
Ы
lpgl/21Te(
г+...
+ Чп
(13)
где
Vfi
, .. о п
- дисперсия импульсной характеристики;
дисперсии параметров, обобщенных импульсной характеристикой.
Hh lost Y2f&i
-.nn iH r T««н
5(ч)
log, VZff6 Y
(14)
i°s JjzlLzS. il +.К ллЈ--Ј iogi75t &|ix
Из выражения (14) видно, что достоверность о техническом состоянии цифрового блока, получаемая сравнением с эталонным значением импульсной характеристики по цепи питания, в от- личие от прототипа, где сравнивается инфранизкочастотный уровень флуктуации тока питания цифрового блока,
возросла в
..е&31 ,Ј -gpJL log2
S, V
раз . Фор
мула изобрет.ения
-20
35
4i
45
50
55
Способ контроля технического состояния цифровых блоков, заключающийся в том, что на контролируемый цифровой блок подают номинальное напряжение питания и импульсное входное тестовое воздействие, определяют выходную реакцию контролируемого цифрового блока и сравнивают ее с эталонной, судят по результатам сравнения о техническом состоянии контролируемого цифрового блока, от- личающийся тем, что, с целью повышения достоверности контроля технического состояния цифровых блоков, выделяют импульсы тока питания контролируемого цифрового блока и преобразуют их в импульсы напряжения, усиливают импульсы напряжения и определяют взаимную корреляционную функцию импульсного входного тестового воздействия и импульсов напряжег ник, принимают взаимную корреляционную функцию в качестве выходной реакции контролируемого цифрового блока,j
J552138
.Сллллллплллпг
LLJJJLJS
я «к
JLJJL
m и -- U-LfLTinП-П
%
Z№§
я;
я
пг
U дд
Составитель В.Степанкин Редактор В.Бугренкова Техред Л. Корректор Н.Ревская
Заказ 329
Тираж 560
ВИНИЛИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035„ Москва, Ж-35, Раушская наб., д, 4/5
JLJJL
/ -lJ
.0ме. Ј
S2
«
№
5«
П.Э
/дз
Ж
if
1Э.М
Подписное
| Способ отбраковки КМОП интегральных схем по уровням надежности | 1985 |
|
SU1269061A1 |
| Способ контроля цифровых блоков | 1984 |
|
SU1320778A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
