Изобретение относится к электротехнике, а именно к устройствам для калибровки электромагнитных расцепи- телей автоматических выключателей.
Цель изобретения - снижение трудо- емкости процесса калибровки.
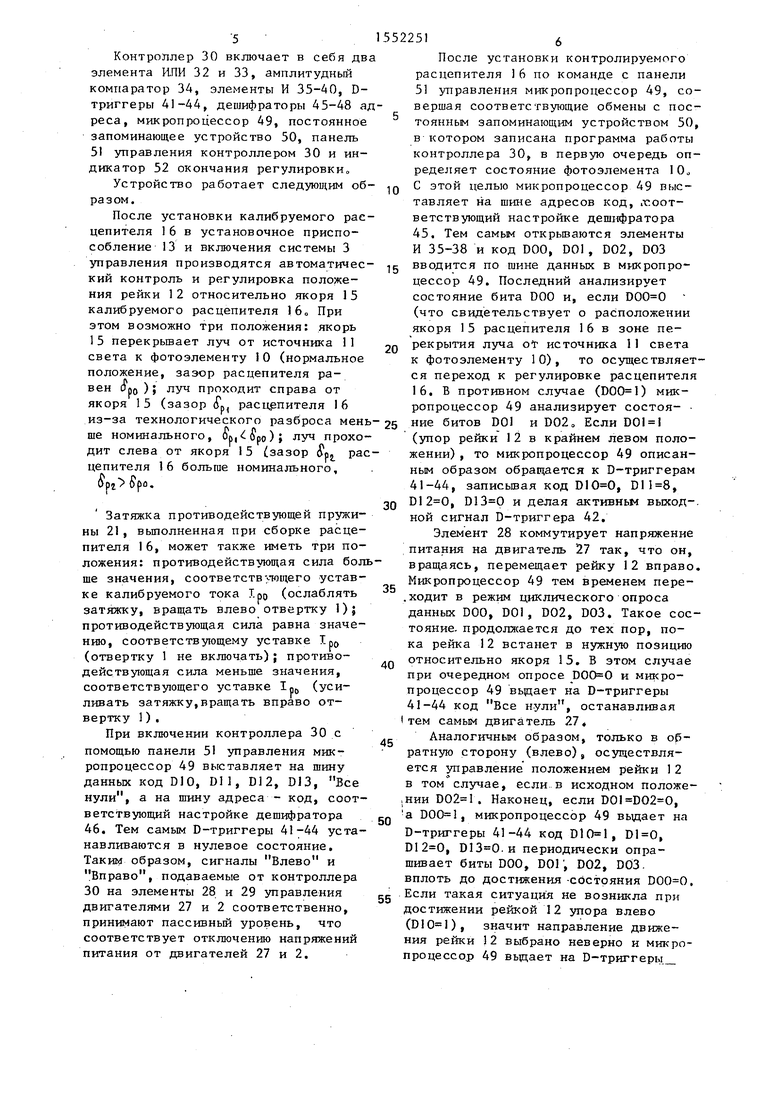
На фиг.1 представлена блок-схема устройства для калибровки; на фиг.2 - схема управления устройством.
Устройство для калибровки электро- магнитных расцепителей автоматических выключателей содержит отвертку 1 с электродвигательным приводом 2, систему 3 управления, которые подключены к источнику 4 питания, эта- лонный электромагнит 5, катушка 6 которого через измерительный прибор 7, отградуированный в токах уставки, подключена через систему 3 управления к источнику 4 питания, шкалу 8 Отградуированную в этих же токах уставки, и указатель 9, с помощью которых эталонный электромагнит 5 мбжет быть перемещен в пололсение, соответствующее току уставки, фото- электрический датчик, состоящий из фотоэлемента 10 и источника 11 света, при этом источник 11 света и фотоэлемент 10 связаны между собой рейкой 12, установочное приспособле- ние 13 и шунт 14, установленный в цепи питания катушки 60 Якорь 15 калибруемого расцепителя 16 помещен между источником 11 света и фотоэлементом 10 таким образом, что в исход ном состоянии якорь 15 перекрывает луч от источника 11 света к фотоэлементу 10. Якорь 17 эталонного электрмагнита 5 снабжен штоком 18, закрепленным на его торце о i
С помощью прижимного устройства 1 и установочного приспособления 13 фиксируется положение якоря 1 5 расцепителя 16 относительно штока 18. Отвертка 1 с электродвигателъным приводом 2, система 3 управления, эталонный электромагнит 5, калибруемый расцепитель 16, установочное
приспособление 13 и прижимное устройство 19 установлены на столе 20. Шкала 8 закреплена на корпусе эталонного электромагнита 5, а указатель 9 - на столе 20. Отвертка 1 выполнена с возможностью воздействия на регулировочный узел расцепителя 1 6, состоящий из противодействующей пружины 21 и гайки 22. Рейка 12 пометена между концевыми датчиками 23 и 24, которые ограничивают перемещение рейки 12 (влево - концевой датчик 23, вправо - концевой датчик 24) Рейка выполнена с возможностью перемещения (влево и вправо) с помощью ходового винта 25, редуктора 26 и приводного двигателя 27. Управление приводным двигателем 27 осуществляется элементом 28 управления, а управление электрода иг а тельным приводом отвертки 1 - элементом 29 управления. Элементы 28 и 29 управления подключены к выходу контроллера 30, к выходу которого также подключены через элемент 31 управления измерительный прибор 7, шунт 14 и катушка 6 эталонного электромагнита 5. К входу контроллера 30 подключены выходы шунта 14, фотоэлемента 10 и концевые датчики 24 и 23.
Эталонный электромагнит 5 с помощью шкалы 8 и указателя 9 установлен от опорной плоскости установочного приспособления 13 на расстоянии
ро
+ Ал + 1Ш
-S
эо
Аро - номинальный зазор расцепителя 16;
АЯ - толщина якоря 15 в месте соприкосновения со штоком 18;
1Ш - длина штока 18; (Э0- зазор эталонного электромагнита 5,
котором он развивает усилие, равусилию расцепителя 16 при зазоyo.
5
Контроллер 30 включает н себя два элемента НИИ 32 и 33, амплитудный компаратор 34, элементы И 35-40, D- триггеры 41-44, дешифраторы 45-48 адреса, микропроцессор 49, постоянное запоминающее устройство 50, панель 51 управления контроллером 30 и индикатор 52 окончания регулировки.
Устройство работает следующим образом.
После установки калибруемого рас- цепителя 16 в установочное приспособление 13 и включения системы 3 управления производятся автоматический контроль и регулировка положения рейки 12 относительно якоря 1 5 калибруемого расцепителя 16„ При этом возможно три положения: якорь 15 перекрывает луч от источника 11 света к фотоэлементу 10 (нормальное положение, зазор расиепителя равен Ор0 ); луч проходит справа от якоря 15 (зазор Гр, расцепителя 16 из-за технологического разброса меньше номинального, ); луч проходит слева от якоря 15 {.зазор 8 расцепителя 16 больше номинального, Орг Јро.
Затяжка противодействующей пружины 21, выполненная при сборке расцепителя 16, может также иметь три положения: противодействующая сила больше значения, соответств тощего уставке калибруемого тока (ослаблять затяжку, вращать влево отвертку 1); противодействующая сила равна значению, соответствующему уставке Ip0 (отвертку 1 не включать); противодействующая сила меньше значения, соответствующего уставке «„ (усиливать затяжку,вращать вправо отвертку 1) .
При включении контроллера 30 с помощью панели 51 управления микропроцессор 49 выставляет на шину данных код DIG, DlI, D12, D13, Все нули, а на шину адреса - код, соответствующий настройке дешифратора 46. Тем самым D-триггеры 41-44 устанавливаются в нулевое состояние. Таким образом, сигналы Влево и Вправо, подаваемые от контроллера 30 на элементы 28 и 29 управления двигателями 27 и 2 соответственно, принимают пассивный уровень, что соответствует отключению напряжений питания от двигателей 27 и 2.
522516
После установки контролируемого расцепителя 16 по команде с панели 51 управления микропроцессор 49, совершая соответствующие обмены с постоянный запоминающим устройством 50, в котором записана программа работы контроллера 30, в первую очередь определяет состояние фотоэлемента 10. JQ С этой целью микропроцессор 49 выставляет на шине адресов код, соответствующий настройке дешифратора 45. Тем самым открываются элементы И 35-38 и код DOO, D01, D02, D03 15 вводится по шине данных в микропроцессор 49. Последний анализирует состояние бита DOO и, если (что свидетельствует о расположении якоря 15 расцепителя 16 в зоне пе- Q рекрытия луча от источника 11 света к фотоэлементу 10), то осуществляется переход к регулировке расцепителя 16. В противном случае () микропроцессор 49 анализирует состоя- 5 ние битов DOI и D02 Если
(упор рейки 12 в крайнем левом положении) , то микропроцессор 49 описанным образом обращается к D-триггерам 41-44, записывая код , , о , и делая активным выходной сигнал D-триггера 42.
Элемент 28 коммутирует напряжение питания на двигатель 27 так, что он, вращаясь, перемещает рейку 12 вправо. Микропроцессор 49 тем временем пере- .ходит в режим циклического опроса данных DOO, DOI, D02, ВОЗ. Такое состояние, продолжается до тех пор, пока рейка 12 встанет в нужную позицию 0 относительно якоря 15. В этом случае при очередном опросе и микропроцессор 49 выдает на D-триггеры 41-44 код Все нули, останавливая (тем самым двигатель 27, 5Аналогичным образом, только в обратную сторону (влево), осуществляется управление положением рейки J2 в том случае, если в исходном положе- ,нии . Наконец, если , „ a , микропроцессор 49 выдает на D-триггеры 41-44 код , , , . и периодически опрашивает биты DOO, DOI, D02, D03 вплоть до достижения состояния , 5 Если такая ситуация не возникла при достижении рейкой 12 упора влево (), значит направление движения рейки 12 выбрано неверно и микропроцессор 49 выдает на 0-триггеры
41-44-код Dl0-0, , , и вновь анализирует бит DOO вплоть до достижения состояния .
После настройки рейки 12 контроллер 30 осуществляет ступенчато-линейное увеличение тока в катушке 6 эталонного электромагнита 5 путем выдачи по шине данных контроллера 30 ступенчато увеличивающегося кода при обращении к дешифратору 48. При этом код с шины данных передается через элемент И 40 к элементу 31 управления эталонным электромагнитом 5. Между соседними увеличениями тока в катушке 6 микропроцессор 49 анализирует состояние бита D03. При сравнении на входе амплитудного компаратора 34 сигнала Ucn , соответствующего току уставки I р0 , и сигнала,
пропорционального току уставки, снимаемого с шунта 14, может оказаться, что ток через катушку 6 больше уставки 1р„ , это значит, что усилие прижима со стороны калибруемого расц пителя 1 6 велико и за.тяжку противодействующей пружины 21 расцелителя 16 нужно ослабить (вращать влево). В этом случае и микропроцессор 49 выдает на D-триггеры 41-44 код , , , , получая активный уровень выходного сигнала D-триггера 43. Тем самым элемент 29 коммутирует напряжение на двигатель 2, так что отвертка 1 ослабляет прижим противодействующей пружины 21 . Тем временем микропроцессор 49 переходит в циклический режим опроса бита D03, и в момент смены состояния, т.е. D03, выдает на D-триггеры 41- 44 код Все нули, останавливая тем самым двигатель 2. Далее происходит обращение к дешифратору 47 при срабатывает элемент И 39 и индикатор 52 информирует об окончании регулировки.
Если ток через эталонный электромагнит 5 был меньше уставки, то по сигналу датчика контроллер 30 осуществляет отклонение тока через катушку 6 эталонного электромагнита 5 и с помощью отвертки 1 осуществляется затяжка противодействующей пружины 21 с целью увеличения усилия прижима. Далее вновь анализируется состояние бита ПОЗ и такой цикл повторя ется вплоть до завершения регулировки. По измерительному прибору 7 конт i ролнруется величина тока уставки.
0
5
0
0
5
5
0
5
0
Таким образом, предлагаемое устройство для калибровки электромагнитных расцепителей автоматических выключателей по сравнению с прототипом обеспечивает снижение процесса калибровки за счет исключения операции, связанной с предварительной затяжкой противодействующей п руж ин ы.
Кроме того, устройство позволяет повысить быстродействие при выполнении калибровки и полностью автоматизировать сам процесс за. счет введения в систему управления микропроцессора, а также за счет автоматического обеспечения необходимого положения рейки при различных рабочих зазорах калибруемых электромагнитных расцепителей.
Формула изобретения
1. Устройство для калибровки электромагнитных расцепителей автоматических выключателей, содержащее установленные -на столе отвертку с электродвигательным приводом, систему управления и эталонный электромагнит со штоком, закрепленным на торце якоря, которые подключены к источнику питания, установочное приспособление с опорной плоскостью, на которой установлен своей торцовой поверхностью магнитной системы калибруемый электромагнитный расцелитель, шкалу и указатель, отличающееся тем, что, с целью сни- же ния трудоемкости процесса калибровки, оно снабжено шунтом, фотоэлектрическим и концевыми датчиками, рейкой и приводом рейки, шунт установлен в цепи питания катушки эталонного электромагнита, а его выход подключен к системе управления, выходы фотоэлектрического и концевых датчиков также подключены к системе управления, фотоэлектрический датчик содержит фотоэлемент и источник света, между которыми размещен якорь калибруемого электромагнитного рас- цепителя и которые связаны между собой рейкой, рейка помещена между концевыми датчиками и выполнена с возможностью перемещения с помощью привода рейки, а эталонный электромагнит установлен на расстоянии от опорной плоскости установочного приспособления
S Јро+ Д
я + 1Ш
-Ј
Эо
де Гр0 - номинальный зазор калибруемого электромагнитного рас- J целителя;
толщина якоря калибруемого электромагнитного расцепителя;10длина штока эталонного электромагнита;
изо зазор эталонного электромагнита,, при котором он развивает усилие, равное уси- 15 лию калибруемого электроЬл
магнитного расцепителя при
зазоре Ьр0.
2. Устройство по п.1, отличающееся тем, что система управления выполнена в виде контроллера и элементов управления электродвигательным приводом отвертки, приводо рейки и эталонным электромагнитом, причем выходы Концевых датчиков, фотоэлемента и шунта подключены к входу контроллера, а к его выходу через указанные элементы управления подключены электродвигательный привод отвертки, привод рейки и эталонный электромагнит.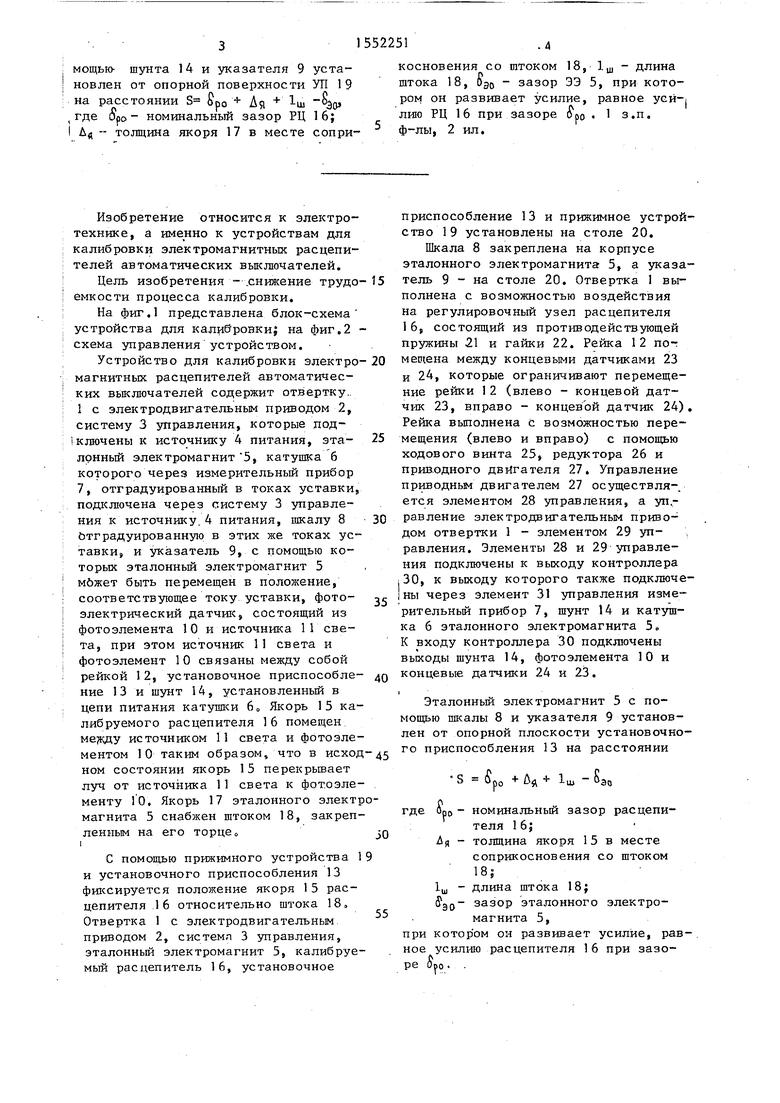
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки электромагнитных расцепителей автоматических выключателей | 1984 |
|
SU1358016A1 |
| Максимальный расцепитель тока | 1990 |
|
SU1709422A1 |
| Автоматический выключатель | 1990 |
|
SU1707645A1 |
| Устройство для копирования свекловичных головок и дообрезки ботвы | 1989 |
|
SU1711705A1 |
| Автоматический выключатель | 1985 |
|
SU1256105A2 |
| Способ калибровки защитных электрических аппаратов | 1976 |
|
SU657413A1 |
| Максимальный расцепитель тока | 1983 |
|
SU1179456A1 |
| Устройство для автоматического управления тяговыми двигателями | 1948 |
|
SU75357A1 |
| Расцепитель минимального напряжения автоматического выключателя | 1982 |
|
SU1089668A1 |
| Максимальный расцепитель тока автоматического выключателя | 1982 |
|
SU1032496A1 |

Изобретение относится к электротехнике. Целью изобретения является снижение трудоемкости процесса калибровки. Устройство содержит установленные на столе 20 отвертку 1 с электродвигательным приводом 2, систему управления /СУ/ 3 и эталонный электромагнит /ЭЭ/ 5 со штоком 18, закрепленным на торце якоря 17, которые подключены к источнику питания 4, установочное приспособление /УП/ 19 для расцепителя /РЦ/ 16, который торцовой поверхностью магнитной системы установлен на опорной плоскости УП 19, шкалу 8 и указатель 9. Введены шунт 14, установленный в цепи питания катушки 6 ЭЭ 5, фотоэлектрический 10 и концевые 23, 24 датчики, выходы шунта 14 и датчиков 10 и 23, 24 подключены к СУ 3, а между датчиком 10 и источником света /ИС/ 11 размещен якорь РЦ 16. При этом ИС 11 и датчик 10 связаны между собой рейкой 12, которая помещена между датчиками 23 и 24 и выполнена с возможностью перемещения с помощью приводного двигателя 27. ЭЭ 5 с помощью шунта 14 и указателя 9 установлен от опорной поверхности УП 19 на расстоянии S = δро + Δя + Lш - δэо, где δро - номинальный зазор РЦ 16, Δя - толщина якоря 17 в месте соприкосновения со штоком 18, Lш - длина штока 18, δэо - зазор ЭЭ 5, при котором он развивает усилие, равное усилию РЦ 16 при зазоре δро. 1 з.п. ф-лы, 2 ил.
35
К 28 длраЗо
ША . ШД
41
Р
W
50
| 0 |
|
SU213190A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ калибровки электромагнитных расцепителей автоматических выключателей | 1984 |
|
SU1358016A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
