г
(Л
Изобретение относится к вычислительной технике и предназначено для использования в устройствах обработки когерентных радиолокационных сиг- налов.
Цель изобретения - повышение точности фильтрами при одновременном упрощении двумерного фильтра.
Поставленная цель достигается пу- тем учета априорно известных с точностью до неопределенной составляющей средних значений фильтруемых синфазного и квадратурного сигналов.
На чертеже приведена электричес- кая структурная схема двумерного фильтра.
Двумерный фильтр содержит первый и второй 2 вычитатели, первый 3, второй 4, третий 5 и четвертый 6 усили- тели, первый - шестой умножители 7-12, первый - шестой сумматоры 13- 18, первый 19, второй 20 и третий 21 интеграторы, первый 22 и второй 23 квадраторы.
Двумерный фильтр работает следующим образом.
На второй вход первого вычитателя 1 поступает сигнал измерения Zc(t) синфазного канала, на первый вход - сигнал обратной связи с выхода первого умножителя 7. В результате на выходе первого вычитателя 1 формируеся сигнал невязки Ec(t), который
после усиления в первом усилителе 3
с коэффициентом усиления A(t) поступает на первый вход первого сумматора 13, где складывается с сигналом с выхода третьего умножителя 9, поступающим на второй вход первого сум- матора 13. Сигнал с выхода первого сумматора 13 интегрируется в первом интеграторе 19 и поступает на входы первого 7 и третьего 9 умножителей, где умножается на коэффициенты соот- ветственно H(t) и F(t). I
Аналогично на второй вход второго . вычитателя 2 поступает сигнал измерения Z(t) квадратурного канала, а на его первый вход - сигнал обратной связи с выхода второго умножителя 8. В результате на выходе второго вычи- тахеля 2 формируется сигнал невязки ER(t), который после усиления во втором усилителе 4 с коэффициентом усиления A(t) поступает на первый вход второго сумматора 14, где складывается с сигналом с выхода четвертого
0 5
0
5
Q 5
гп
умножителя 10, поступающим на второй вход второго сумматора 14. Сигнал с выхода второго сумматора 14 интегрируется во втором интеграторе 20 и поступает на входы второго 8 и четвертого 10 умножителей, где умножается на коэффициенты соответственно H(t) и F(t).
Таким образом, на выходах первого 19 и второго 20 интеграторов формируются оценки, получаемые с помощью фильтров Калмана соответственно синфазного и квадратурного каналов.
Сигналы невязки Ec(t) и EK(t) с выходов первого 1 и второго 2 вычи- тателей поступают на входы соответственно третьего 5 и четвертого 6 усилителей. Сигнал Ec(t) после усиления в третьем усилителе 5 с коэффициентом усиления Ac(t) поступает на первый вход третьего сумматора 15, а сигнал EK(t) после усиления в четвертом усилителе 6 с коэффициентом усиления AK(t) поступает на второй вход третьего сумматора 15. После суммирования в третьем сумматоре 15 данные сигналы поступают на вход третьего интегратора 21, с выхода которого сигнал поступает на входы пятого 11 и шестого 12 умножителей, где умножается на коэффициенты соответственно (f (t) И (y;(t) .
Сигнал с выхода пятого умножителя 11 поступает на первый вход четвертого сумматора 16, на второй вход которого с выхода первого интегратора
19поступает оценка, получаемая с помощью фильтра Калмана синфазного канала. В результате на выходе четвертого сумматора 16 формируется смещенная оценка полезного нецентрированного сигнала синфазного канала.
Сигнал с выхода шестого умножителя 12 поступает на первый вход пятого сумк 17, на второй вход которого выхода второго интегратора
20по /лает оценка, получаемая с помо j фильтра Калмана квадратурного нала. В результате на выходе
пя ого сумматора 17 формируется смещенная оценка полезного нецентрированного сигнала квадратурного канала.
Оценки сигналов синфазного и квадратурного каналов поступают соответ- ственгк, через первый 22 и второй 23 квадро оры на соответствующие входы шестого сумматора 18, на выходе ко
торого формируется оптимальная по вероятностному критерию смещенная оценка интенсивности когерентного радиолокационного сигнала.
Таким образом, в двумерном фильтре повышается точность фильтрации, так как использование вероятностного критерия не на уровне когерентного сигнала, а на уровне его интенсивности позволяет более коректно учитывать априорную информацию о средних значениях сигналов синфазного и квадратурного каналов и принимать более корректные решения на уровне интенсивности когерентного радиолокационного сигнала, а также избежать расходимости фильтра без расширения вектора состояния системы.
Кроме того, расширены функциональные возможности фильтра, так как в нем, кроме оценок нецентрированных сигналов синфазного и квадратурного каналов, формируется оценка интенсивности когерентного радиолокационного сигнала. В случае, если поступающий когерентный радиолокационный сигнал не содержит стабильной составляющей, сеть является случайным процессом с нулевым средним значением, то оценки предложенного фильтра совпадают с оценками прототипа.
Формула изобретения
Двумерный фильтр, содержащий последовательно соединенные первые вы- читатель, усилитель, сумматор, интегратор и умножитель, выход которог соединен с первым входом первого вы- читателя, последовательно соединенные вторые вычитатель, усилитель, су
10
15
20
о,Q 5558296
матор, интегратор и умножитель, выход которого соединен с первым входом второго вычитателя, третий умножитель, включенный между выходом первого интегратора и вторым входом первого сумматора, четвертый умножитель, включенный между выходом второго интегратора и вторым входом второго сумматора, третий сумматор и пятый и шестой умножители, причем вторые входы первого и второго вы- читателей являются входами синфазной и квадратурной составляющих входного сигнала двумерного фильтра, о т л и- чающийся тем, что, с целью повышения точности фильтрации при одновременном упрощении двумерного
25
30
35
фильтра, введены третий и четвертый усилители, третий интегратор, пятый и шестой умножители, первый и второй квадраторы, третий, четвертый и пятый сумматоры, причем выходы первого и второго вычитателей соединены через третий и четвертый усилители с первым и вторым входами третьего сумматора соответственно, выход которого соединен через третий интегратор с входами пятого и шестого умножителей, выход первого из которых соединен через последовательно соединенные четвертый сумматор и первый квадратор с первым входом шестого сумматора, а выход шестого умножителя соединен через последовательно соединенные пятый сумматор и второй квадратор с вторым входом шестого сумматора, вторые входы четвертого и пятого сумматоров соединены с выходами первого и второго интеграторов соответственно, а выход шестого сумматора является выходом двумерного фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ АМПЛИТУДЫ НЕКОГЕРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ КВАЗИРАДИОСИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2021 |
|
RU2774436C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ НЕКОГЕРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ КВАЗИРАДИОСИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2020 |
|
RU2756974C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА И ДЛИТЕЛЬНОСТИ НЕКОГЕРЕНТНОЙ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ КВАЗИРАДИОСИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2022 |
|
RU2797027C1 |
| РАДИОЛОКАЦИОННЫЙ ДАТЧИК СКОРОСТИ СБЛИЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА С ПРЕПЯТСТВИЕМ | 2013 |
|
RU2543493C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| СПОСОБ ПРИЕМА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2006 |
|
RU2307474C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА И ДЛИТЕЛЬНОСТИ ОДИНОЧНОГО СВЕРХШИРОКОПОЛОСНОГО КВАЗИРАДИОСИГНАЛА ПРОИЗВОЛЬНОЙ ФОРМЫ | 2022 |
|
RU2797258C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СТРУКТУРНЫХ ПОМЕХ | 2010 |
|
RU2450445C2 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
Изобретение относится к вычислительной технике. Цель изобретения - повышение точности фильтрации при одновременном упрощении двумерного фильтра. Фильтр содержит вычитатели 1 и 2, усилители 3 - 6, умножители 7 - 12, сумматоры 13 - 18, интеграторы 19 - 21 и квадраторы 22 и 23. Цель достигается путем обеспечения учета априорно известных с точностью до неопределенной составляющей средних значений фильтруемых синфазного и квадратурного сигналов. 1 ил.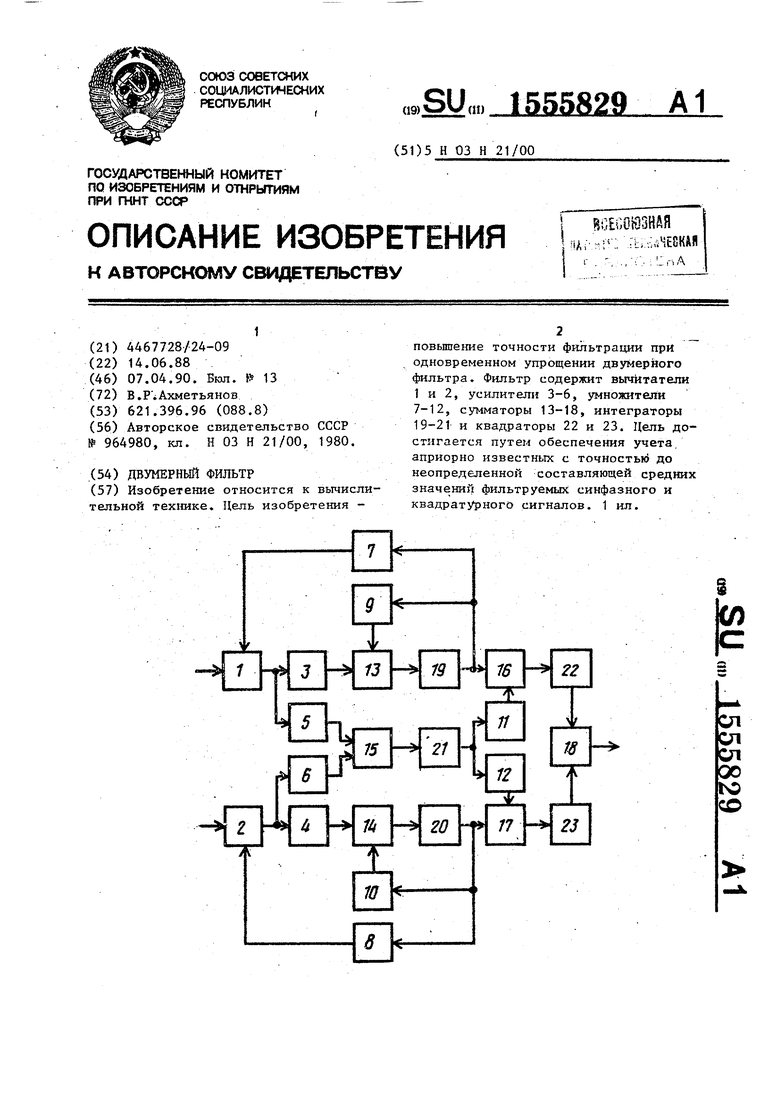
| Двумерный адаптивный фильтр Калмана | 1980 |
|
SU964980A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
