Изобретение относится к радиоизмерительной технике и может найти применение для адаптивной коррекции параметров динамических характеристик сложных нелинейных и нестационарных радиотехнических устройств и систем, содержащих радиокомпоненты как с аналоговыми, так и с цифровыми сигналами, например квадратурный демодулятор с АЦП на выходе, который широко используется в радиолокационных системах, пеленгаторах и гидролокационных системах с фазированными антенными решетками.
Известны способ и устройства для измерения и коррекции цифровыми методами синфазного и квадратурного радиотехнического канала [1, 2, 3, 4].
При нестабильности динамических характеристик радиолокационных станций, например АЧХ и ФЧХ, в цифровое устройство доплеровской обработки квадратурных импульсных видеосигналов [5], содержащее блоки прямого дискретного преобразования Фурье ДПФ (БПФ) и блок обратного дискретного преобразования Фурье ОДПФ (ОБПФ), дополнительно вводили блок цифрового формирования однополосного импульсного видеосигнала ЦФОИВС, содержащий внеполосный фазовращатель на угол 90o или 270o. ЦФОИВС формирует спектр однополосного сигнала только в пределах одного частотного интервала 0-Fп, тогда как остальная часть спектра остается двухполосной (Fп - частота повторения). Это устройство позволяет корректировать искажения, обуславливаемые не только передатчиком, но и вносимые передающей и приемной антеннами, а также цепями приемника. В этом случае для вычисления корректирующих сигналов необходимо найти подходящий внешний по отношению к РЛС источник опорного сигнала. Такой подход используется в РЛС COBRA DANE, работающей с широкополосным 200-МГц сигналом. Для формирования опорного сигнала служил созданный в Линкольновской лаборатории спутниковый комбинированный отражатель в виде сферы с ЭПО, равной 1 м2. Отраженный от сферы сигнал преобразуется в цифровую форму и обрабатывается процессором БПФ для вычисления корректирующих коэффициентов для КИХ-фильтра сжатия импульсов.
Микропроцессор реализует автоматическую процедуру подстройки амплитудной и фазовой характеристик одного из квадратурных каналов относительно другого. К недостаткам этих устройств относится сложность алгоритма коррекции импульсной переходной функции адаптивного цифрового фильтра, что неизбежно снижает точность и быстродействие.
Близким техническим решением к предлагаемому является цифровой измеритель сдвига фаз [6], содержащий объект исследования - квадратурный демодулятор, два аналого-цифровых преобразователя, два сумматора-вычитателя, два сумматора-накопителя, два блока управления нелинейной фильтрацией, счетчики, вычислительный блок и блок индикации. Синхронизация всех блоков, кроме микропроцессорного вычислительного блока, осуществляется от прецизионного кварцевого генератора тактовых сигналов АЦП.
Недостаток этого устройства состоит в ограничении числа идентифицируемых параметров квадратурного демодулятора. Помимо этого, при обнаружении неадекватности радиотехнических каналов квадратурного демодулятора оно не позволяло выполнить оперативную адаптивную коррекцию их динамических характеристик.
Наиболее близко к предлагаемому устройство для определения взаимокорреляционных функций переходных характеристик квадратурного демодулятора [7], содержащее генератор прямоугольных импульсов, счетчик, блок индикации, прецизионный генератор квадратурных гармонических сигналов эталонной опорной частоты, формирователь импульсов, цифровой блок регулирования фазы синхронизации, выход которого соединен с входом задания фазы генератора прямоугольных импульсов, выход которого через ключ подключен на сигнальный информационный вход квадратурного демодулятора, являющегося объектом параметрической идентификации и адаптивной коррекции, выход первой фазы эталонного сигнала опорной частоты генератора гармонических сигналов соединен через формирователь импульсов с информационным входом счетчика и первым синфазным входом исследуемого квадратурного демодулятора, второй вход которого соединен с ортогональным выходом эталонного генератора гармонических сигналов, выход переполнения счетчика соединен с информационным входом цифрового блока регулирования фазы синхронизации.
К недостаткам этого устройства можно отнести ограничения по применению результатов измерения непосредственно для адаптивной цифровой коррекции характеристик квадратурного демодулятора в реальном масштабе времени.
Настоящее изобретение направлено на расширение функциональных возможностей устройства. Технический результат, достигаемый при решении этой задачи, состоит в идентификации трех дополнительных обобщенных параметров, таких как коэффициент передачи, полоса низкочастотной фильтрации и наклон ФЧХ, и повышении оперативности адаптивной коррекции динамических характеристик радиоканалов с цифровыми квадратурными модуляторами.
Это достигается тем, что в известное устройство, содержащее генератор прямоугольных импульсов, счетчик, блок индикации, генератор гармонических сигналов эталонной опорной частоты, формирователь импульсов, цифровой блок регулирования фазы синхронизации, выход которого соединен с входом запуска генератора прямоугольных импульсов, выход которого через ключ подключен к сигнальному информационному входу квадратурного демодулятора, являющегося объектом адаптивной коррекции параметров, первый выход генератора гармонических сигналов соединен с первым синфазным входом квадратурного демодулятора и через формирователь импульсов с информационным входом счетчика, второй выход генератора гармонических сигналов соединен со вторым ортогональным входом квадратурного демодулятора, выход переполнения счетчика соединен с информационным входом цифрового блока регулирования фазы синхронизации, введены два буферных регистра, информационные входы которых являются измерительными входами для подключения к соответствующим выходам квадратурного демодулятора (АЦП), два цифровых БИХ-фильтра второго порядка, подключенные информационными входами в параллельном коде к выходам первого и второго буферного регистра соответственно, два арифметических суматора-вычитателя, два цифровых сумматора-накопителя, два мультиплексора временного разделения, входами подключенные к первому, второму и третьему выходу соответствующих цифровых БИХ-фильтров, а выходами к первому и второму входам соответствующих арифметических сумматоров-вычитателей, выходы которых подключены к входам первого и второго цифрового сумматора-накопителя соответственно, микропроцессорный комплект, содержащий входные и выходные регистры данных, блок обработки данных (БОД), блок микропрограммного управления (МПУ) и генератор синхроимпульсов (ГСИ), причем первый и второй входные регистры данных подключены к выходам соответствующих цифровых сумматоров-накопителей, первый управляющий выход микропроцессорного комплекта соединен с задающим входом цифрового блока регулирования фазы синхронизации, а второй управляющий выход микропроцессорного комплекта соединен через цифровой блок регулирования фазы синхронизации с входом запуска генератора прямоугольных импульсов, выход формирователя импульсов соединен с входом синхронизации микропроцессорного комплекта, выход общей синхронизации которого соединен с соответствующими входами синхронизации буферных регистров, БИХ-фильтров, мультиплексоров, арифметических сумматоров-вычитателей и цифровых сумматоров-накопителей, соединенных последовательно в параллельном коде по схеме конвейерного типа, третий, четвертый и пятый управляющие выходы микропроцессорного комплекта соединены с первым, вторым и третьим корректирующими входами первого цифрового БИХ-фильтра, а шестой, седьмой и восьмой управляющие выходы микропроцессорного комплекта соединены с соответствующими корректирующими входами второго цифрового БИХ-фильтра, четвертые выходы первого и второго цифрового БИХ-фильтра являются скорректированными выходами квадратурного демодулятора, первый, второй и третий регистры выходных данных микропроцессорного комплекта подключены к блоку индикации, управляющий вход которого соединен с девятым управляющим выходом микропроцессорного комплекта.
При этом цифровые БИХ-фильтры второго порядка реализованы по схеме конвейерного типа и содержат в прямой цепи первый арифметический блок умножения, первый вход которого является информационным входом цифрового БИХ-фильтра, первый арифметический сумматор-вычитатель, втрой арифметический блок умножения, первый цифровой сумматор-накопитель, третий арифметический блок умножения и второй цифровой сумматор-накопитель, включенные последовательно в параллельном коде, причем выходы второго и первого цифрового сумматора-накопителя и первого арифметического сумматора-вычитателя являются соответственно первым, вторым и третьим выходом цифрового БИХ-фильтра, в обратной связи которого включен второй арифметический сумматор-вычитатель, подключенный входами к первому и второму выходам цифрового БИХ-фильтра, а выходом к второму входу первого арифметического сумматора-вычитателя, первый выход цифрового БИХ-фильтра соединен с первым входом третьего арифметического сумматора-вычитателя, ко второму входу которого подключен через четвертый арифметический блок умножения и четвертый арифметический сумматор-вычитатель второй выход цифрового БИХ-фильтра, третий выход которого через пятый арифметический блок умножения подключен к второму входу четвертого арифметического сумматора-вычитателя, причем вторые входы первого, четвертого и пятого арифметических блоков умножения являются первым, вторым и третьим корректирующими входами цифрового БИХ-фильтра соответственно и подключены к соответствующим управляющим выходам микропроцессорного комплекта, а выход третьего арифметического сумматора-вычитателя каждого цифрового БИХ-фильтра является соответствующим выходом квадратурного демодулятора.
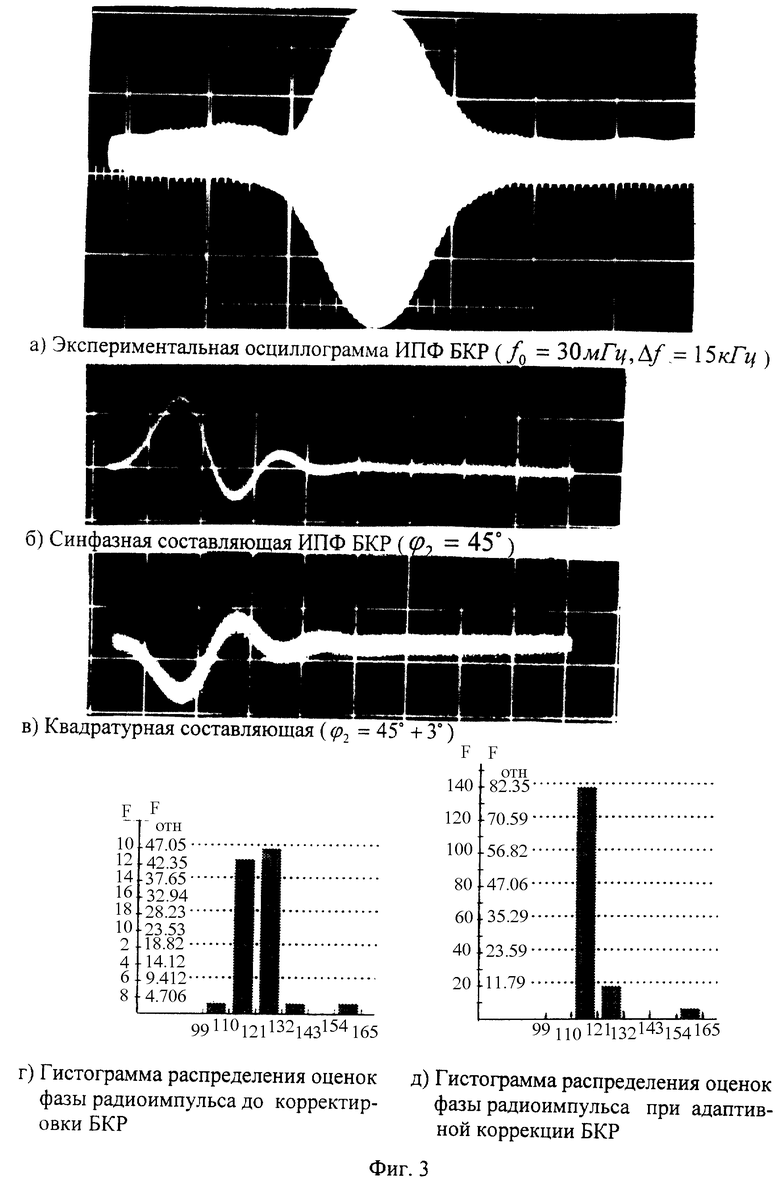
На фиг.1 представлена структурная схема устройства; на фиг.2 - схема цифрового БИХ-фильтра; на фиг.3 - экспериментальные результаты исследования погрешности БКД при оценке фазы радиоимпульса в случае параметрических возмущений и оперативной адаптивной коррекции.
Цифровое устройство для адаптивной коррекции квадратурных демодуляторов (фиг.1) содержит генератор 1 гармонических сигналов (термостабилизированный, кварцевый, опорной частоты), сдвинутых на 90o (эталонный генератор), формирователь импульсов синхронизации 2, счетчик 3, генератор прямоугольных импульсов 4, ключ 5, блок квадратурного демодулятора 6 (радиотехнический объект), содержащий два аналого-цифровых преобразователя (АЦП) 8, 9 сигналов на соответствующих выходах аналоговых НЧ-фильтров в цифровую форму, цифровой блок регулирования фазы синхронизации 7, два буферных регистра 10, 11, информационные входы которых являются измерительными входами для подключения соответствующих выходов квадратурного демодулятора (АЦП), два мультиплексора с временным разделением коммутируемых каналов 12 и 13, два цифровых БИХ-фильтра второго порядка 14 и 15, два арифметических сумматора-вычитателя 16 и 17, два арифметических сумматора-накопителя 18 и 19, микропроцессорный комплект 20, содержащий входные и выходные регистры данных, блок обработки данных (БОД), устройство микропрограммного управления (МПУ) и генератор синхроимпульсов (ГСИ), который синхронизирует работу МПУ, БОД, регистров, мультиплексоров с временным разделением, и блок индикации 21. Устройство микропрограммного управления работает в конвейерном режиме, что позволяет повысить быстродействие за счет параллельной организации работы буферных регистров 10, 11, цифровых БИХ-фильтров 14 и 15, мультиплексоров 12, 13, арифметических сумматоров-вычитателей 16, 17, цифровых сумматоров-накопителей 18, 19 и микропроцессорного комплекта 20. Каждый цифровой БИХ-фильтр 14 и 15 (фиг.2) содержит первый 22, второй 23 и третий 24 арифметические блоки умножения, четыре арифметических сумматора-вычитателя 25, 26, 27 и 28 и два цифровых сумматора-накопителя 29, 30, а также четвертый 31 и пятый 32 арифметические блоки умножения.
Цифровые БИХ-фильтры 14, 15 работают в конвейерном режиме. Синхронизация записи данных с буферных регистров 10, 11 осуществляется сигналом общей синхронизации с микропроцессорного комплекта (МПУ). Гармонический сигнал опорной частоты, вырабатываемый генератором 1, поступает на вход формирователя 2 и затем счетчика 3, осуществляющего деление сигнала опорной частоты, например, на 103 по одному выходу счетчика 3 и на (103-1) по другому выходу (сдвиг на один разряд). Счетчик 3 синхронизирует запуск когерентно с эталонным опорным сигналом генератора 4 прямоугольных импульсов с частотой fг= f0/103. Генератор 4 вырабатывает последовательность коротких импульсов, когерентно сдвинутых относительно синхроимпульсов на величину τ(i), задаваемую цифровым блоком регулирования фазы 7, который управляется в параллельном коде от микропроцессорного комплекта 20. Выход генератора 4 через ключ 5 соединен с первым, сигнальным входом исследуемого квадратурного демодулятора 6, а на второй и третий его входы поступают гармонические квадратурные опорные сигналы с двух выходов генератора 1 гармонических сигналов. Выходы исследуемого квадратурного демодулятора 6 через буферные регистры 10, 11 подключены на соответствующие входы цифровых БИХ-фильтров 14, 15, первые, вторые и третьи выходы которых через мультиплексоры 12 и 13 коммутируются в параллельном коде с соответствующими входами арифметических сумматоров-вычитателей 16 и 17, выходы которых связаны с информационными входами цифровых сумматоров-накопителей 18 и 19. Оценки идентифицированных обобщенных параметров исследуемого радиотехнического объекта (БКД) или отклонения их от эталонно заданных выводятся последовательно во времени через соответствующий регистр выходных данных на устройство индикации 21. Синхронизация всех блоков, работающих в конвейерном режиме, осуществляется от генератора гармонических сигналов 1 (опорной частоты) через формирователь импульсов синхронизации 2 микропроцессорным комплектом (ГСИ) 20, который через цифровой блок регулирования фазы синхронизации 7 запускает генератор прямоугольных импульсов 4.
Устройство работает следующим образом. Гармонический сигнал опорной частоты, вырабатываемой генератором 1, поступает на вход формирователя тактовых импульсов 2 и затем счетчика 3, осуществляющего деление сигнала опорной частоты, например, на 103 по одному выходу счетчика 3 и на (103-1) по другому выходу (сдвиг на один разряд). Микропроцессорный комплект запускает когерентно с эталонным опорным сигналом генератор 4 прямоугольных импульсов с более низкой частотой fг=f0/103. Генератор 4 вырабатывает последовательность прямоугольных импульсов, когерентно сдвинутых относительно синхроимпульсов на величину τ[i], которая задается цифровым блоком регулирования фазы 7, управляемым микропроцессорным комплектом 20. Эти широкополосные импульсы поступают через ключ 5 на первый сигнальный вход исследуемого квадратурного демодулятора 6, а на второй и третий его входы поступают гармонические квадратурные опорные сигналы с двух соответствующих выходов генератора 1 гармонических сигналов. Импульсные отклики каналов квадратурного демодулятора 6, соответствующие ИПФ (импульсной переходной функции) радиотехнических каналов w1(ϕ1,t) и w2(ϕ2,t) с выходов АЦП 8, 9 подаются на информационные входы первого и второго буферного регистра 10, 11. Импульсная переходная функция wj(ϕj,t) соответствует передаточной функции [7] одного канала квадратурного демодулятора для изменения амплитуды на входе при постоянном значении ϕ(i)
где
Групповое время запаздывания ±τ3 в каналах квадратурного демодулятора, обусловленное аппаратной реализацией радиотехнического канала, не влияет на оценку (2), так как находится внутри интервала усреднения.

где j=1, 2;
i - соответствует какому-то шагу измерения.
В отличие от известного устройства [7] в данном устройстве интегрирование на интервале усреднения от tсв[1] до tсв[1000] производится в арифметических сумматорах-накопителях 18 и 19 соответственно приближенным методом прямоугольников "вперед", который в отличие от всех других способов численного интегрирования не вносит дополнительного фазового сдвига в цифровой БИХ-фильтр, в структуре которого предусмотрены два дискретных интегратора 29, 30 (см. фиг.2), что не приводит к потере устойчивости цифрового фильтра второго порядка, если даже коэффициент демпфирования фильтра ξ сделать равным нулю, что соответствует структуре автоколебательного звена. На первом шаге идентификации параметров производится оценка коэффициентов передачи соответственно синфазного и квадратурного канала демодулятора 6. С помощью цифрового блока регулирования фазы 7 сдвига возбуждающего импульса задается ϕ=45o, в этом случае sin[ϕ] = cos[ϕ] = 1/2. Микропрограммное управляющее устройство, входящее в состав микропроцессорного комплекта 20, с помощью мультиплексоров 12 и 13 коммутирует первые выходы соответствующих БИХ-фильтров через сумматоры-вычитатели 16, 17 с первым и вторым цифровыми сумматорами-накопителями 18 и 19. Объем выборки, которая задается в начале измерения, контролируется микропроцессорным комплектом 20.
Рассогласование каналов квадратурного демодулятора 6 по коэффициенту передачи K
ΔK* = 1-SC11/SC21, (3)
где 
Поскольку интегрирование сигналов с выходов цифровых БИХ-фильтров осуществляется на всем протяжении ИПФ каналов квадратурного демодулятора, влияние двух других обобщенных параметров ξкд и Ткд в этом режиме измерения не сказывается, так как интеграл от первой и второй производной ИПФ на этом интервале равен нулю. Используя полученную оценку К*, можно произвести соответствующую коррекцию цифрового БИХ-фильтра, изменяя параметр масштабного блока 22 (см. фиг. 2). В этом режиме можно оценить смещение ΔS* в каналах БКР, обусловленное дрейфом активных усилителей ПТ.
ΔS
где Сi1 - сигналы на первом выходе БИХ-фильтров при разомкнутом ключе 5.
На втором этапе последовательно производится оценка второго параметра, характеризующего погрешность фазового сдвига между каналами, в соответствии с алгоритмом: 1) в качестве сигналов Х(nТ) и Y(nT) берутся сигналы первых выходов БИХ-фильтров С11(nТ) и С21(nТ); 2) оператор запаздывания τ3 аппроксимирован рядом Паде второго порядка, что соответствует линейному дифференциальному уравнению:
где Т - шаг квантования, во времени единый для АЦП и БИХ-фильтров, работающих в конвейерном режиме;
n=1, 2, 3, 4,...
От уравнения (4) можно перейти к уравнению
DF2Z3(nT)+6DFZ2(nT)-12Z1(nТ)=0 (5)
где DF - неизвестный параметр, характеризующий знак и величину сдвига по фазе в каналах квадратурного демодулятора, включая АЦП и цифровые БИХ-фильтры. При фиксированной длительности ИПФ и периодическом возбуждении объекта исследования
Z1(nT)=C21(nT)-C11(nT),
Z2(nT)=C22(nT)+C12(nT),
Z3(nT)=C23(nT)-C13(nT),
Переменная Z1(nT) в дискретных точках (nТ) формируется на выходе арифметического сумматора-вычитателя 16 и синхронно поступает на информационный вход цифрового сумматора-накопителя 18. Сигнал Z2(nT) формируется на выходе арифметического сумматора-вычитателя 17. Сигналы Сji(nT) снимаются с первых, вторых и третьих выходов цифровых БИХ-фильтров 14, 15 соответственно, причем
Cj2(nT)=dCjl(nT)/dt,
а Cj3(nT)=dCj2(nT)/dt=d2Cjl(nT)/dt2.
Точность оценки сдвига фаз в каналах квадратурного демодулятора 6 можно повысить, если статистически накапливать информацию на цифровых сумматорах-накопителях 18 и 19, синхронно управляя ГСИ. Объем выборки контролируется микропрограммным управлением МПУ. Интегрирование сигналов, входящих в уравнение (5), на специально формируемых отрезках времени niТ и ni+kТ заменили численным интегрированием методом прямоугольников. Микропроцессорный комплект блоков 20 решает сформированное квадратное уравнение относительно неизвестного параметра DF в БОД:
DF2(-SZ1)+6DFSZ2-12SZ1=0, (6)
где 

S'Z3=-S'Z1
Микропроцессорный комплект 20 вычисляет значение
DF1=(3•SZ2+D)/SZ1,
DF2=(3•SZ2-D)/SZ1,
где D - дискриминант уравнения (6), вычисляется по формуле
Результатом цифрового измерения сдвига фаз DF является меньший по модулю из двух DF1 и DF2. Знак и величина DF* так же, как и ΔK*, выводится на блок индикации 21.
Оценка DF* соответствует рассогласованию по групповому времени запаздывания в каналах БКР согласно выражению (1).
Если транспортное запаздывание e-τ в первом и втором каналах квадратурного демодулятора одно и то же, то на втором этапе можно произвести оценку отклонения параметра (2ζлдTкд) = b
Микропроцессорный комплект (МПУ) 20 с помощью мультиплексоров 12 и 13 коммутирует вторые выходы соответствующих цифровых БИХ-фильтров через первые входы арифметических сумматоров-вычитателей 16, 17 к первому и второму цифровому сумматору-накопителю 18, 19 соответственно. Рассогласование каналов квадратурного демодулятора 6 по параметру b
Δb
где SMCj2= ∑|Cj2|(nT);
Cj2(nT)•SIGN[Cj2(nT)] = |Cj2|(nT).
Так как интегрирование сигналов Cjl(nT)•SIGN[Cj2(nT)] и Cj3(nT)•SIGN[Cj2(nT)] на интервале длительности ИПФ в уравнении вида (4) равно нулю.
Используя блок умножения 31 в структуре БИХ-фильтра, микропроцессорный комплект 20 производит коррекцию второго параметра ± Δb1, характеризующего фазовое рассогласование между каналами БКД. На фиг.3а показаны экспериментальные осциллограммы узкополосного БКД (Δf=15 кГц) при Δϕ = ±5°. На третьем этапе процедуры идентификации последовательно во времени проводится оценка ΔT
Δb
где 
Уравнение (8) можно получить, если сдвиг по фазе в каналах БКД равен 45o. В этом случае sin(ϕ1) = cos(ϕ1) = 1/2, так как к третьему этапу параметрической идентификации каналы БКР по первым двум параметрам ΔK* и Δb
Операция взятия модуля от числовых отсчетов с третьего выхода БИХ-фильтров реализуется в микропроцессорном комплекте в БОД: не учитывается знак отсчетов Cj3[nkT] на соответствующих выходах цифровых БИХ-фильтров.
Используя оценку Δb
Литература
1. Патент США 4484194, МПК G 01 G 7/40 от 27.11.84.
2. С. Дж. Рабиновитц и др. "Цифровые методы в радиолокации", ТИИЭР, том 73, 2, 1985, с. 182-199.
3. Межд. заявка РСТ, 86/01001, МПК G 01 B, 52, 7/29 от 13.02.86.
4. Патент США 5717619, МПК G 06 F 17/10 от 10.02.98.
5. Заявка РФ на изобретение, 97109368/09, МПК6 G 06 F 17/00, G 01 S 13/00, "Цифровое устройство доплеровской обработки квадратурных импульсных видеосигналов". RU БИ 15 27.05.99, с. 260.
6. А.с. СССР 1292492 (НП), МПК G 06 F 15/336, "Устройство для определения взаимокоррелляционных функций характеристик квадратурного демодулятора". Опубл. 28.02.85.
7. А.с. СССР 1609328 (НП), МПК G 06 G 7/19, G 01 R 25/00, "Цифровой измеритель сдвига фаз". Опубл. 23.12.88.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТРАНСПОРТНОГО ЗАПАЗДЫВАНИЯ СИГНАЛА В ТЕХНОЛОГИИ И ТЕХНИКЕ СВЯЗИ | 2003 |
|
RU2258938C2 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ЗАЩИТЫ ИНФОРМАЦИИ В СЕТЯХ СВЯЗИ | 2005 |
|
RU2295195C1 |
| СПОСОБ ИНДЕНТИФИКАЦИИ ТОНАЛЬНЫХ СИГНАЛОВ В СЕТЯХ СВЯЗИ И ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2291405C2 |
| ЦИФРОВОЕ КВАДРАТУРНОЕ УСТРОЙСТВО ФАЗОВОЙ СИНХРОНИЗАЦИИ И ДЕМОДУЛЯЦИИ | 2015 |
|
RU2591032C1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ТЕЛЕВИЗИОННЫХ СИГНАЛОВ | 1991 |
|
RU2014745C1 |
| ЦИФРОВОЙ ИДЕНТИФИКАТОР ПАРАМЕТРОВ ЗАРЯДКИ АККУМУЛЯТОРОВ | 2003 |
|
RU2258952C2 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2011 |
|
RU2505922C2 |
| НЕКОГЕРЕНТНЫЙ ЦИФРОВОЙ ДЕМОДУЛЯТОР "В ЦЕЛОМ" КОДИРОВАННЫХ СИГНАЛОВ С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2014 |
|
RU2556429C1 |
| Цифровой демодулятор сигналов с квадратурной амплитудной манипуляцией | 2015 |
|
RU2628427C2 |
| ЦИФРОВОЙ КОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР ЧЕТЫРЕХПОЗИЦИОННОГО СИГНАЛА С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2017 |
|
RU2656577C1 |

Изобретение может быть использовано в радиотехнических устройствах и системах, содержащих радиокомпоненты с аналоговыми и цифровыми сигналами. Техническим результатом является расширение функциональных возможностей устройства, заключающееся в идентификации дополнительных параметров и повышении оперативности адаптивной коррекции динамических характеристик радиоканалов с цифровыми фазовыми модуляторами. Для этого устройство содержит генератор прямоугольных импульсов, счетчик, блок индикации, прецизионный генератор квадратурных гармонических сигналов эталонной опорной частоты, формирователь импульсов, цифровой блок регулирования фазы синхронизации, а также два буферных регистра, два цифровых БИХ-фильтра второго порядка, два арифметических сумматора-вычитателя, два цифровых сумматора-накопителя, два мультиплексора временного разделения и микропроцессорный комплект с входными и выходными регистрами данных, блоком обработки данных, блоком микропрограммного управления и генератором синхроимпульсов. Цифровые БИХ-фильтры реализованы по схеме конвейерного типа. 3 ил.
Цифровое устройство для адаптивной коррекции квадратурных демодуляторов с аналого-цифровыми преобразователями (АЦП), содержащее генератор прямоугольных импульсов, счетчик, блок индикации, генератор гармонических сигналов эталонной опорной частоты, формирователь импульсов, цифровой блок регулирования фазы синхронизации, выход которого соединен с входом задания фазы генератора прямоугольных импульсов, выход которого через ключ подключен к сигнальному информационному входу квадратурного демодулятора с АЦП, первый выход генератора гармонических сигналов опорной частоты соединен с первым синфазным входом квадратурного демодулятора с АЦП и формирователем, импульсов, соединенным с информационным входом счетчика, при этом со второго выхода генератора гармонических сигналов опорной частоты поступают гармонические квадратурные опорные сигналы на второй вход квадратурного демодулятора с АЦП, выход переполнения счетчика соединен с информационным входом цифрового блока регулирования фазы синхронизации, информационные входы двух буферных регистров являются измерительными входами для подключения к соответствующим выходам квадратурного демодулятора с АЦП, два цифровых БИХ-фильтра второго порядка подключены к первому и второму буферным регистрам соответственно, входы двух мультиплексоров временного разделения подключены к первому, второму и третьему выходам соответствующих цифровых БИХ-фильтров второго порядка, а выходы двух мультиплексоров - к входам соответствующих арифметических сумматоров-вычитателей, выходы которых подключены к входам первого и второго цифровых сумматоров-накопителей соответственно, микропроцессорный комплект подключен к выходам соответствующих цифровых сумматоров-накопителей, первый управляющий выход микропроцессорного комплекта соединен с входом сброса в начальное состояние цифрового блока регулирования фазы синхронизации, а второй управляющий выход микропроцессорного комплекта соединен с цифровым блоком регулирования фазы синхронизации, выход формирователя импульсов соединен с входом микропроцессорного комплекта, выход которого соединен с соответствующими входами синхронизации буферных регистров, БИХ-фильтров второго порядка, мультиплексоров временного разделения, арифметических сумматоров-вычитателей и цифровых сумматоров-накопителей, третий, четвертый и пятый управляющие выходы микропроцессорного комплекта соединены с корректирующими входами первого цифрового БИХ-фильтра второго порядка, а шестой, седьмой и восьмой управляющие выходы микропроцессорного комплекта соединены с соответствующими корректирующими входами второго цифрового БИХ-фильтра второго порядка, четвертые выходы первого и второго цифровых БИХ-фильтров второго порядка являются скорректированными выходами квадратурного демодулятора с АЦП, микропроцессорный комплект подключен к блоку индикации, управляющий вход которого соединен с девятым управляющим выходом микропроцессорного комплекта.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2132079C1 |
| ДЕМОДУЛЯТОР ШИРОКОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2128399C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| US 04918718 А, 17.04.1990 | |||
| US 05260975 А, 05.11.1993. | |||

