рие.1
Изобретение относится к грузоподъемным устройствам и может быть использовано в подъемниках для использования в автоматических линиях металлорежущих станков, а также для подъема грузов.
Цель изобретения - расширение технологических возможностей.
На фиг.1 показан привод подъемника, общий вид; на фиг. 2 - траектория движения двуплечего рычага при на фиг.З - то же, при d 0°. Привод подъемника включает в себя двуплечие рычаги, состоящие из одних, (ведомых) 1 и других (ведущих) 2 плеч о Верхние (одни ) плечи 1 снабжены роликами 3, на которые опирается подъемная платформа 4. Нижние (другие) плечи 2 снабжены роликами 5 и связаны тягой 6, длина которой может изменяться, например, посредством резьбовых соединений входящих в нее элементов. Двуплечие рычаги своими средними частями размещены в вертикальных направляющих 7 основания 8 „ Для снижения потерь на трение средние части рычагов снабжены роликами 9, шарнирно связанными осью 10, которые перекатываются в вертикальных направляющих 7. Один конец тяги 6 шарнирно связан со штоком 11 привода 12 перемещения, смонтированного на основании 8, Нижние ролики 5 выполнены с возможностью контактирования с горизонтальными направляющими 13, расположенными на основании 8, и шарнирно связаны с концами плеч 2 посредством оси 14. Одни 1 и другие 2 плечи рычагов шарнирно связаны между собой посредством оси 10 и могут быть зафиксированы при различных .значениях углов между собой
Привод подъемника работает следующим образом.
Под действием привода 12 перемещения шток 11 движется влево, перемещая регулируемуюрезьбовую тягу 6, нижние плечи 2 двуплечих рычагов и ролики 5. Двуплечие рычаги начинают пов рачиваться вокруг осей 10, опираясь нижними роликами 5 на горизонтальные направляющие 13. На нижних концах плеча 2 возникает вертикальная сила, перемещающая двуплечий рычаг вместе с осями 10 и роликами 9 по вертикальным направляющим 7. Вертикальное перемещение подъемной платформы 4, опирающейся на верхние ролики 3, будет определяться вращательным движением двуплечих рычагов вокруг осей 10 и одновременно вертикальным перемещением двуплечих рычагов в направляющих 7 (см. фкг.2, где d - начальный угол установки двуплечего рычага).
Для опускания подъемной платформы 4 под действием привода 12 перемещения шток 11 перемещается вправо вместе с тягой 6, нижними плечами 2 и нижними роликами 5. Двуплечий ры5 чаг поворачивается вокруг оси 10, а под действием силы тяжести подъемная платформа 4 опускается, прижимая нижние ролики Ь к горизонтальным направляющим 13.
о Для расширения технологических возможностей устройства привод механизма подъема может быть выполнен по принципу винт - гайка, при этом относительно вращающегося винта бу5 дут перемещаться гайки, закрепленные на нижних осях двуплечих рычагов.
Увеличение начальной скорости подъема груза достигается уменьшением начального угла d установки
Q двуплечего рычага, регулируемого резьбовой тягой 6.
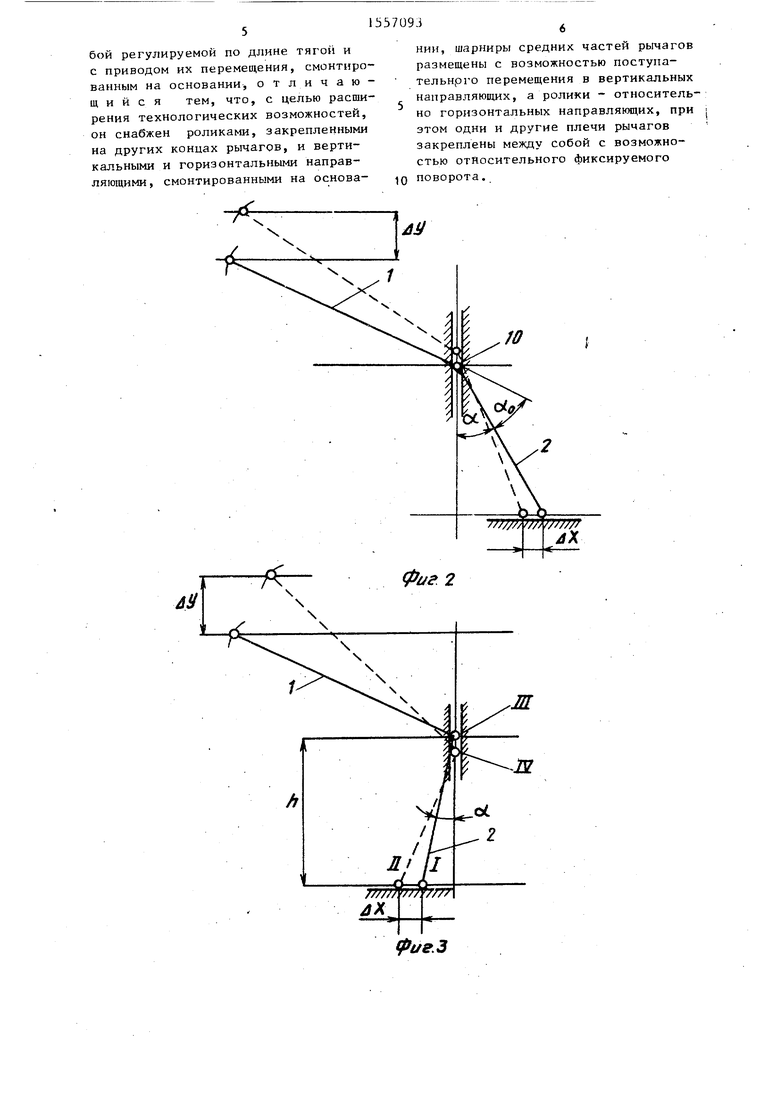
На фиг.З показана траектория движения двуплечего рычага с отрицательным начальным углом d установки.
При перемещении нижнего конца рычага из положения I в положение П двуплечий рычаг поворачивается вокруг оси 10, поднимая подъемную Q платформу 4, и вместе с осью 10
опускается из положения III в положение IV, уменьшая высоту подъема платформы 4. Однако суммарная величина подъема платформы 4 при равных 45 перемещениях нижнего конца рычага при отрицательном начальном угле d получается больше, чем при положительном его значении.
50
ормула изобретения
Привод подъемника, содержащий как минимум две пары двуплечих рычагов, шарнирно с возможностью поворо- та в вертикальной плоскости связанных средними частями с основанием подъемника, на одних плечах которых расположена подъемная платформа, а другие - шарнирно связаны между собой регулируемой по длине тягой и с приводом их перемещения, смонтированным на основании, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен роликами, закрепленными на других концах рычагов, и вертикальными и горизонтальными направляющими , смонтированными на основании, шарниры средних частей рычагов размещены с возможностью поступа- тельнрго перемещения в вертикальных направляющих, а ролики - относительно горизонтальных направляющих, при : этом одни и другие плечи рычагов закреплены между собой с возможностью относительного фиксируемого поворота.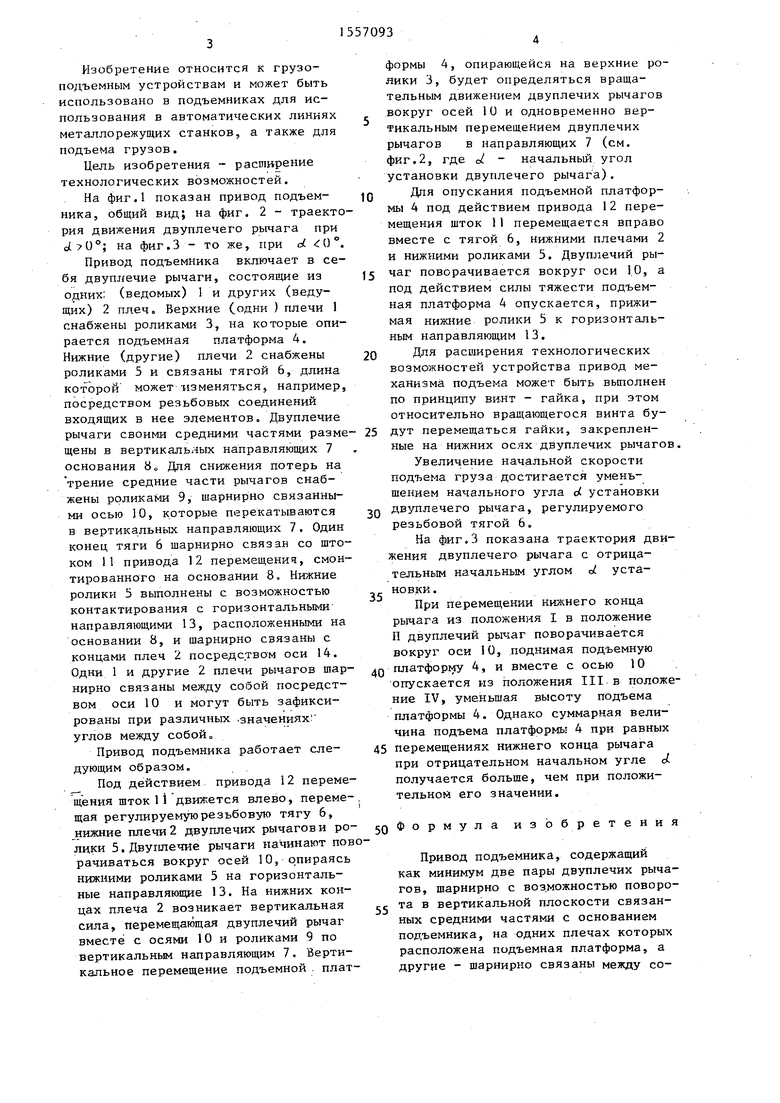
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2268239C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407694C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| Подъемник | 1981 |
|
SU1074798A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2268238C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| УСТРОЙСТВО ДЛЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙ В СКВАЖИНАХ | 1992 |
|
RU2021475C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| Грузоподъемное устройство | 1985 |
|
SU1691287A1 |
Изобретение относится к грузоподъемным устройствам и может быть использовано в подъемниках для использования в автоматических линиях металлорежущих станков, а также для подъема грузов. Цель изобретения - расширение технологических возможностей. Привод содержит двуплечие рычаги, ведомые 1 и ведущие 2 плечи которых шарнирно связаны между собой осью 10, снабженной роликом 9, перемещаемым в вертикальных направляющих 7 основания 8. Верхние концы плеч 1 снабжены роликами 3, на которые опирается подъемная платформа 4. Нижние концы плеч 2 снабжены роликами 5 и связаны регулируемой тягой 6, перемещаемой выдвижным штоком 11 привода 12. Ролики 5 выполнены с возможностью взаимодействия с горизонтальными направляющими 13 основания 8. Ведомое 1 и ведущее 2 плечи имеют устройство для изменения угла между их продольными осями с последующей фиксацией взаимного расположения в вертикальной плоскости. 3 ил.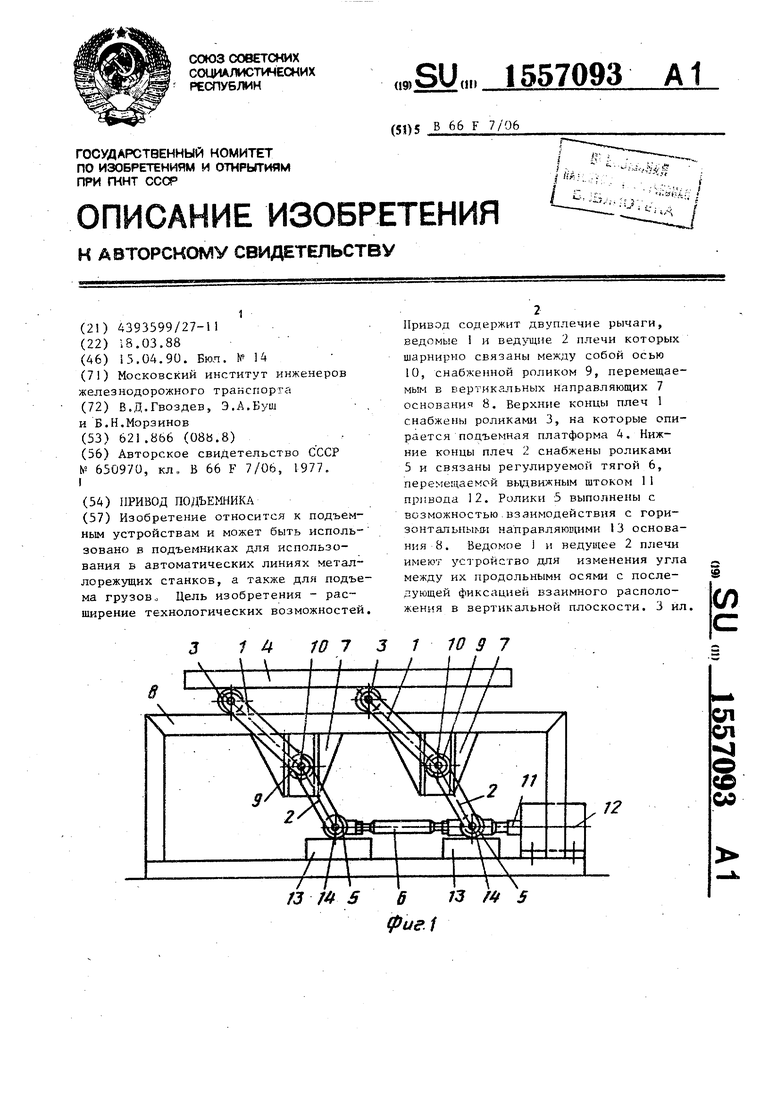
to
f////Af/// /////f
Л л
Фиг 2
| Подъемное устройство | 1977 |
|
SU650970A1 |
| I | |||
