Изобретение относится к устройствам для генерирования сейсмических сигналов в грунте, предназначено для сейсмической разведки нефтяных и газовых месторождений и является усовершенствованием устройства по авт. св. № 1390586.
Цель изобретения - повышение надежности источника за счет исключения перекоса направляющих стоек.
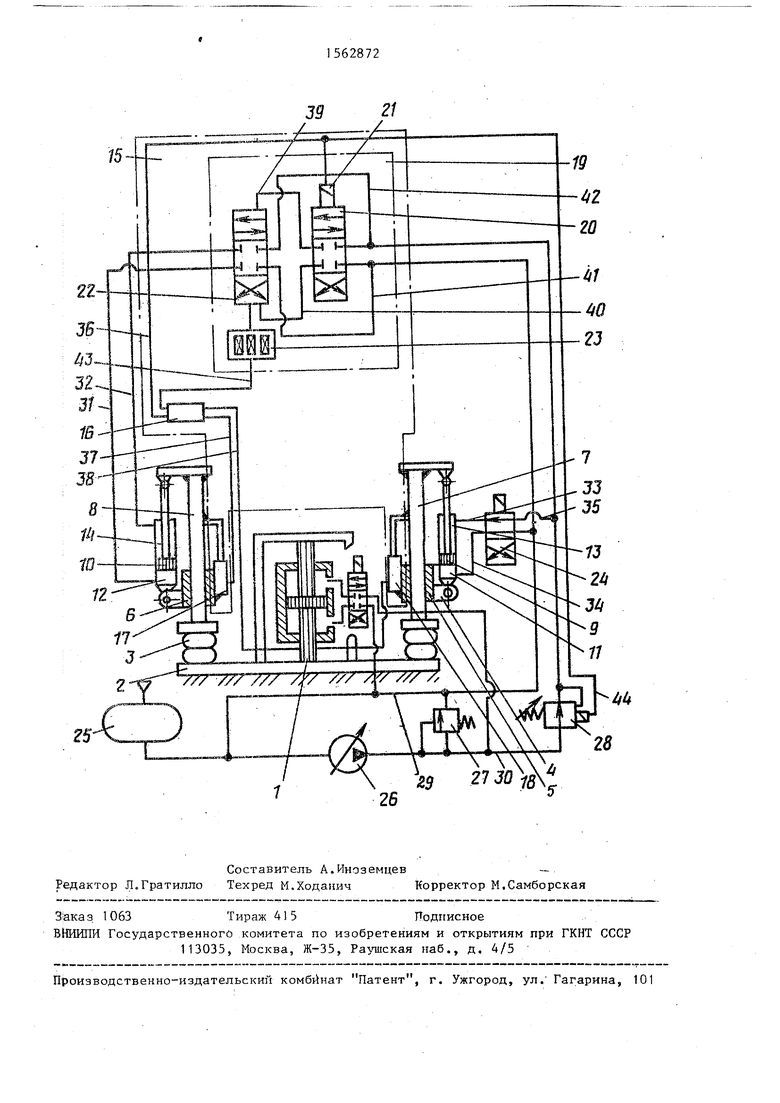
На чертеже изображен источник сейсмических сигналов.
Источник содержит гидравлический исполнительный механизм 1 с опорной плитой 2,узел 3 виброизоляций, механизм 4 подъема-опускания, включающий
направляющие устройства 5 и 6 с направляющими стойками 7 и 8, цилиндры 9 и 10 подъема-опускания с поршневыми полостями 11 и 12 и штоковыми полостями 13 и 14, устройство 15 синхронизации, включающее усилитель 1 6 разности сигналов, датчики 17 и 18 перемещения и электрогидравлический преобразователь 19, состоящий из управляющего золотника 20 с электромеханическим преобразователем 21 и управляемого золотника 22 с датчиком 23 положения местной обратной связи, распределитель 24 подъема-опускания, системы 25 гидропитания с насосом 26 и предохранительный клапан 27, регуN)
3
лируемый редукционный клапан 28 с электромагнитным управлением, установленный в связанной с поршневой полостью 13 цилиндра 9 гидролинии высокого давления системы гидропитания на выходе из насоса 26 перед распределителем 24. При этом вход электрогидравлического преобразователя 1 9 соединен гидролиниями 29 и 30 с системо 2|5 гидропитания, а выход - гидролини 31 и 32 с цилиндром 10 пЪдъема-опускания. Второй цилиндр 9 подъема-опускания, соединен гиц р олиниями 33 и 34 с распределителем 24 подъема-опускания, вход которого гидролинией 35 соединен с гидролинией 29 системы 25 гидропитания. Электромеханический преобразователь 21 соединен электрической связью 36 с усилителем 16 разности сигналов, связанным электролиниями 37 и 38 с датчиками 17 и 18 перемещения, уста- н)овленными на направляющих стойках 7 И 8, Выход управляющего золотника 20 цоединен гидролиниями 39 и 40 с торцовыми камерами управляемого золотни 22, а вход управляемого золотника 2; 2 гидролиниями 41 и 42 соединен с гВДролиниями 29 и 30. Датчик 23 положения местной обратной связи связан Электролинией 43 с усилителем 16 раз Иости сигналов. Регулируемый редукционный клапан 28 связан электролинией 44 с усилителем 16 разности сигналов .
Источник работает следующим образом.
Для приведения источника из транспортного положения в рабочее рабочая Жидкость по гидролинии 30 от насоса 26 через регулируемый редукционный клапан 28 подается к электрогидравлическому преобразователю 19 и по гидролинии 35 на распределитель 24 Подъема-опускания, который по команд Включается на опускание опорной плиты 2. Далее по гидролинии 33 рабочая жидкость поступает в штоковую полост 13 цилиндра 9 подъема-опускания. Вследствие этого шток последнего начинает перемещаться вниз, увлекая за собой направляющую стойку 7, а вместе с ней датчик 18 перемещения. В усилителе 16 разности сигналов происходит сравнение сигналов с датчиков 17 и 18 перемещения. Так как в этот момент сигнал с датчика 17 перемещения не изменился, то рассогласование
0
5
0
5
0
5
40
45
50
5
сигналов с усилителя 16 разности сигналов поступает на электромеханический преобразователь 21 управляющего золотника 20 электрогидравлического преобразователя 19. Происходит открытие управляющего золотника 20 пропорционально поданному сигналу и рабочая жидкость по гидролинии 39 поступает в торцовую полость управляемого золотника 22, вследствие чего последний перемещается под действием поступившей рабочей жидкости на открытие. Рабочая жидкость по гидролинии 42 поступает в управляемый золотник 22 и далее по гидролинии 32 попадает в штоковую полость 14 цилиндра 10 подъема-опускания, шток которого начинает перемещаться вниз, увлекая за собой направляющую стойку 8, а вместе с ней и датчик 17 перемещения Таким образом, рассогласование сигналов на усилителе 16 разности сигналов сводится к нулю,
В штоковую полость 14 цилиндра 10 подъема-опускания попадает такое же количество рабочей жидкости, как и в штоковую полость 33 цилиндра 9 подъема -опускания, При этом рабочая жидкость из поршневой полости 12 цилиндра 10 подъема-опускания по гидролинии 31 , гидроканалу 41, а из цилиндра 9 подъема-опускания по гидролинии 34 через распределитель 24 подъема- опускания попадает в гидролинию 29 и затем в систему 25 гидропитания.Опорная плита 2 опускается на грунт и прижимается частью веса транспортного средства. Направление движения и удержание опорной плиты 2 относительно транспортного средства производятся направляющими 5 и 6. Исполнительный механизм 1 вырабатывает колебания и передает их через опорную плиту 2 в грунт. Виброизоляция транспортного средства осуществляется узлом 3 виброизоляции.
После сеанса возбуждения опорная плита 2 с исполнительным механизмом 1 поднимается в транспортное положение. Операция осуществляется в обратном порядке путем включения распределителя 24 подъема-опускания в противоположное направление.
Рабочее давление поддерживается клапаном 27. Для увеличения точности синхронного перемещения цилиндров 9 и 10 подъема-опускания местной обратной связью контролируется перемещение управляемого золотника 22 электрогидравлического преобразователя 19 по сравнению с перемещением управляющего золотника 20.
Контроль осуществляется следующим образом. Сигнал о перемещении управляемого золотника 22 с датчика 23 положения местной обратной связи попадает по электролинии 43 в усилитель 16 разности сигналов и сравнивается с-рассогласованием датчиков 17 и 18 перемещения. Полученный в результате этого сравнения сигнал попадает по электролинии 36 на электромеханический преобразователь 21 управляющего золотника 20 и таким образом происходит коррекция движения.
При заклинивании управляющего золотника 20 в торцовую полость управляемого золотника 22 не поступает рабочая жидкость или поступает постоянно, независимо от сигнала рассогласования с усилителя 1 6 разности -сигналов . Управляемый золотник 22 находится в закрытом состоянии или пропускает малое количество жидкости в штоковую полость 14 цилиндра 10 подъема-опускания. Движение направляющих стоек 7 и 8 несинхронно. Сигнал с усилителя 3 6 разности сигналов увеличивается и превышает величину сигнала, необходимого на полное открытие управляемого золотника 22. На эту величину настроено электромагнитное управление регулируемого редукционного клапана 28. Он включается и уменьшает давление в гидролинии 29 по нуля,что приведет к остановке движения направляющих стоек 7 и 8.
0
5
0
5
0
5
0
При заклинивании управляемого золотника 22 сигнал о перемещении управляемого золотника 22 с датчика 23 положения местной обратной связи остается постоянным. Сравнение его в усилителе 16 разности сигналов с рассогласованием датчиков 17 и 18 перемещения приводит к увеличению сигнала на выходе усилителя 16 разности сигналов. Когда величина сигнала пре-, высит величину сигнала, необходимого на полное открытие управляемого золотника 22, он включит регулируемый редукционный клапан 28, который уменьшит давление в гидролинии 29 до нуля, что приведет к остановке движения направляющих стоек 7 и 8. Б такой последовательности работы источника достигается повышенная точность синхронизации перемещения направляющих стоек 7 и 8, которая исключает возможность их заклинивания и таким образом повышается надежность самого источника.
Формула изобретения
1
Источник сейсмических сигналов по
авт. св. № 1390586, отличающийся тем, что, с целью повышения надежности за счет исключения перекоса направляющих стоек, в источник введен регулируемый редукционный клапан с электромагнитным управлением, электрически связанный с усилителем разности сигналов и установленный в связанной со штоковой полостью цилиндра гидролинии высокого давления перед распределителем подъема-опускания.
/5
25
28
26
Z9 27 30 )j

| название | год | авторы | номер документа |
|---|---|---|---|
| Источник сейсмических сигналов | 1989 |
|
SU1755225A1 |
| Источник сейсмических сигналов | 1989 |
|
SU1679437A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1390586A1 |
| Источник сейсмических сигналов | 1989 |
|
SU1679438A1 |
| Вибрационный источник сейсмических сигналов | 1988 |
|
SU1583902A1 |
| Источник сейсмических сигналов | 1984 |
|
SU1221628A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1341598A1 |
| Источник сейсмических сигналов | 1985 |
|
SU1341599A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
Изобретение относится к устройствам генерирования сейсмических сигналов и предназначено для сейсмической разведки нефтяных и газовых месторождений. Цель изобретения - повышение надежности источника сейсмических сигналов за счет исключения перекоса направляющих стоек. Источник содержит гидравлический исполнительный механизм с опорной плитой, механизм подъема-опускания с направляющими стойками и цилиндрами подъема-опускания, один из которых соединен с системой гидравлического питания через распределитель, а другой - через устройство синхронизации, включающее усилитель разности сигналов, датчики перемещения и электрогидравлический преобразователь, состоящий из управляющего и управляемого золотников. В гидролинии высокого давления перед распределителем установлен регулируемый редукционный клапан с электромагнитным управлением, электрически связанный с усилителем разности сигналов. 1 ил.
| Источник сейсмических сигналов | 1986 |
|
SU1390586A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
