Изобретение относится к геофизической технике, а именно к устройствам для возбуждения сейсмических сигналов в грунте при проведении сейсморазведочных работ - источникам сейсмических сигналов, используемым для поиска нефти и газа.
Известны устройства для возбуждения сейсмических волн, содержащие систему гидропитания, гидравлический исполнительный механизм с опорной плитой, узел виброизоляции, механизм подъема-опускания, включающий направляющие устройства, цилиндры подъема-опускания, расположенные по краям опорной плиты, и систему синхронизации подъема-опускания, включающую тросовую систему, где один конец троса соединен Со штоком цилиндра подъема-опускания на одной стороне опорной плиты, а другой конец - с
цилиндром подъема-опускания на другой стороне опорной плиты.
Недостатками данных устройства являются следующие: сложная конструкция из- за применения тросовой системы синхронизации; недостаточная надежность системы синхронизации.
Указанные недостатки влекут за собой снижение надежности источника и увеличение его массы.
Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является источник сейсмических сигналов, содержащий систему гидропитания с распределительной гидроаппаратурой и насосом, гидравлический исполнительный механизм с преобразователем-усилителем и опорной плитой, узел виброизоляции, включающий пневмоопоры, соединенные пнев -i
Ч
ел ел го ю ел
момагистралями с источником сжатого воздуха, механизм подъема-опускания, включающий направляющие, цилиндры подъема-опускания со штоковой и поршневой полостями, гидрораспределитель с управляющим электромагнитом, соединенный с одним из цилиндров подъема-опускания, и устройство синхронизации, содерхсащее блок усилителей разности сигналов, датчики синхронизации м электро- гидравлический преобразователь Кроме того, электрогидравлический преобразователь состоит из управляющего золотника, вход которого соединен гидролиниями с системой гидропитания и снабжен датчиком положения местной обратной связи по положению управляемого золотника, вход которого соединен с полостями второго цилиндра подъема-опускания.
Недостатком данного источника явля- ется отставание во времени начала перемещения второго цилиндра подъема- опускания, причем первый цилиндр подъема-опускания никак не реагирует на это. Кроме того, жидкость при попадании во вто- рой цилиндр подъема-опускания проходит большее количество дросселирующих отверстий и местных сопротивлений Вследствие этого происходят потери гидравлической энергии, и Д1гпеиие на вто- ром цилиндре подъема-опускания будет меньшим. Все это обуславливает недостаточную синхронность перемещений штоков цилиндров подъема-опускания, приводит к тому, что иесинхронность перемещений при большом рабочем давлении-пеличина рассогласования движения направляющих стоек-становится значительной и возможно их заклинивание.
Кроме того, при выходе из строя пнев- моопор опорная плита виброисточника получит перекос, равный толщине пневмоспоры, вследствие чего произойдет перекос и заклинивание направляющих стоек, а значит выход из строя всего источника сейсмических сигналов.
Таким образом, снижается надежность источника сейсмических сигналов.
Целью изобретения является повышение надежности источника сейсмических сигналов за счет повышения точности синхронизации направляющих стоек, а также за счет контроля за состоянием пневмоопор
Указанная цель достигается тем, что в источнике сейсмических сигналов, содер- жзщем систему гидропитания с распределительной гидроаппаратурой и насосом, гидравлический исполнительный механизм с преобразователем-усилителем и опорной плитой, узел виброизоляции, включающий
пневмоопоры, соединенные пиевмомагист- ралями с источником сжатого воздуха, механизм подъема-опускания, включающий направляющие, цилиндры подъема-опускания со штоковой и поршневой полостями, гидрораспрзделитель с управляющим электромагнитом, соединенный с одним из цилиндров подъема-опускания, и устройство синхронизации, содержащее блок усилителей разности сигналов, датчики синхронизации и электрогидравлический преобразователь, в лневмомагистралях установлены датчики давления и пневморасп- ределителисуправляющими
электромагнитами, причем выходы датчиков давления и управляющие электромагнитыпнеомораспределителей и гидрораспределителей соединены с блоком усилителей разности сигналов.
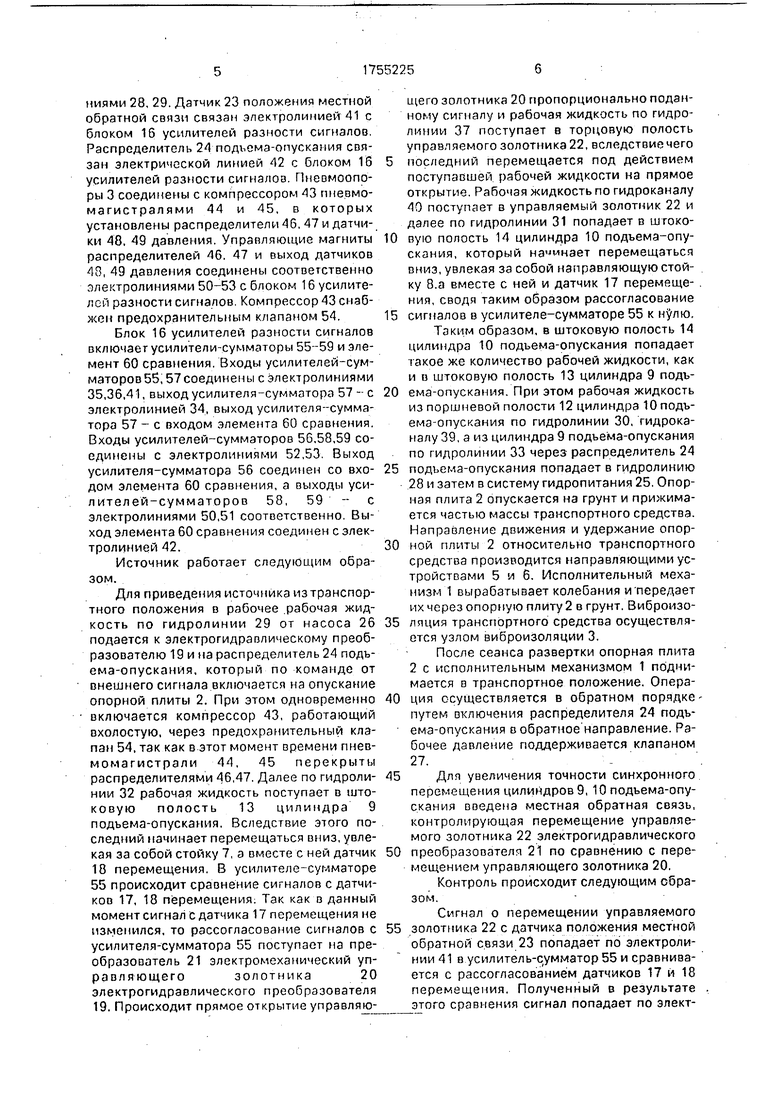
На фиг. 1 представлена схема источника на фиг. 2 - блок-схема блока усилителей разности сигналов,
Источник сейсмических сигналов содержит гидравлический исполнительный механизм 1 с опорной плитой 2, узел вибро- мзоляции, включающий пневмоопоры 3, механизм 4 подъема-опускания, включающий направляющие устройства 5 и 6 с направляющими стойками 7 и 8, цилиндры 9,10 подъема-опускания с поршневыми полостями 11 и 12, и штоковыми полостями 13 и 14, устройство 15 синхронизации, включающее блок 16 усилителей разности сигналов, датчики 17 и 18 перемещения и электрогидравлический преобразователь 19, состоящий из управляющего золотника 20 с преобразователем электромеханическим 21 и управляемого золотника 22 с датчиком 23 положения местной обра гной связи, распределитель 24 подъема-опускания, систему 25 шдропита- ния с насосом 26 и предохранительный клапан 27.
Вход электрогидравлического преобразователя 19 соединен гидролиниями 28, 29 с системой 25 гидропитания, а выход гидролиниями 30,31 с цилиндром 10 подъема-опускания.
Второй цилиндр 9 подъема-опускания соединен гидролиниями 32, 33 с распределителем 24 подъема-опускания. Преобразователь 21 электромеханический соединен электрической связью 34 с блоком 16 усилителей разности сигналов, связанным электролиниями 35, 36 с датчиками 17, 18 перемещения, установленными на направляющих 7,8 Выход управляющего золотника 20 соединен гидроканалами 37 и 38 с торцовыми камерами управляемого золотника 22, а вход управляемого золотника 22 п/щроканзлами 39, 40 соединен с гидролиниями 28, 29. Датчик 23 положения местной обратной связи связан электролинией 41 с блоком 16 усилителей разности сигналов. Распределитель 24 подъема-опускания связан электрической линией 42 с блоком 16 усилителей разности сигналов. Пневмоопо- ры 3 соединены с компрессором 43 пневмо- магистралями 44 и 45, в которых установлены распределители 46, 47 и датчики 48, 49 давления. Управляющие магниты распределителей 46. 47 и выход датчиков 48, 49 давления соединены соответственно электролиниями 50-53 с блоком 16 усилителей разности сигналов Компрессор 43 снабжен предохранительным клапаном 54.
Блок 16 усилителей разности сигналов включает усилители-сумматоры 55-59 и элемент 60 сравнения. Входы усилителей-сумматоров 55,57 соединены с электролиниями 35,36,41, выход усилителя-сумматора 57 - с электролинией 34, выход усилителя-сумматора 57 - с входом элемента 60 сравнения. Входы усилителей-сумматоров 56,58,59 соединены с электролиниями 52,53. Выход усилителя-сумматора 56 соединен со входом элемента 60 сравнения, а выходы усилителей-сумматоров 58, 59 - с электролиниями 50,51 соответственно. Выход элемента 60 сравнения соединен с электролинией 42.
Источник работает следующим образом.
Для приведения источника из транспортного положения в рабочее рабочая жидкость по гидролинии 29 от насоса 26 подается к электрогидравлическому преобразователю 19 и на распределитель 24 подъема-опускания, который по команде от внешнего сигнала включается на опускание опорной плиты 2. При этом одновременно включается компрессор 43, работающий вхолостую, через предохранительный клапан 54, так как в этот момент времени пнев- момагистрали 44, 45 перекрыты распределителями 46,47. Далее по гидролинии 32 рабочая жидкость поступает в што- ковую полость 13 цилиндра 9 подьема-опускания, Вследствие этого последний начинает перемещаться вниз, увлекая за собой стойку 7, а вместе с ней датчик 18 перемещения. В усилителе-сумматоре 55 происходит сравнение сигналов с датчиков 17, 18 перемещения. Так как в данный момент сигнал сдатчика 17 перемещения не изменился, то рассогласование сигналов с усилителя-сумматора 55 поступает на преобразователь 21 электромеханический управляющегозолотника20электрогидравлического преобразователя 19. Происходит прямое открытие управляющего золотника 20 пропорционально поданному сигналу и рабочая жидкость по гидролинии 37 поступает в торцовую полость управляемого золотника 22, вследствие чего последний перемещается под действием поступавшей рабочей жидкости на прямое открытие. Рабочая жидкость по гидроканалу 40 поступает в управляемый золотник 22 и далее по гидролинии 31 попадает в шгоко0 вую полость 14 цилиндра 10 подъема-опускания, который начинает перемещаться вниз, увлекая за собой направляющую стойку 8.а вместе с ней и датчик 17 перемещения, сводя таким образом рассогласование
5 сигналов в усилителе-сумматоре 55 к нулю.
Таким образом, в штоковую полость 14
цилиндра 10 подъема-опускания попадает
акое же количество рабочей жидкости, как
и в штоковую полость 13 цилиндра 9 подъ0 ема-опускания. При этом рабочая жидкость из поршневой полости 12 цилиндра 10 подъема-опускания по гидролинии 30, гидроканалу 39, а из цилиндра 9 подъема-опускания по гидролинии 33 через распределитель 24
5 подъема-опускания попадает в гидролинию 28 и затем в систему гидропитания 25. Опорная плита 2 опускается на грунт и прижимается частью массы транспортного средства. Направление движения и удержание опор0 ной плиты 2 относительно транспортного средства производится направляющими устройствами 5 и б. Исполнительный механизм 1 вырабатывает колебания и передает их через опорную плиту 2 в грунт. Виброизо5 ляция транспортного средства осуществляется узлом виброизоляции 3.
После сеанса развертки опорная плита 2 с исполнительным механизмом 1 поднимается в транспортное положение. Опера0 ция осуществляется в обратном порядке- путем включения распределителя 24 подъема-опускания в обратное направление. Рабочее давление поддерживается клапаном 27.
5 Для увеличения точности синхронного перемещения цилиндров 9, 10 подъема-опускания введена местная обратная связь, контролирующая перемещение управляемого золотника 22 электрогидравлического
0 преобразователи 21 по сравнению с перемещением управляющего золотника 20.
Контроль происходит следующим образом.
Сигнал о перемещении управляемого
5 золотника 22 с датчика положения местной обратной связи 23 попадает по электролинии 41 в усилитель-сумматор 55 и сравнивается с рассогласованием датчиков 17 и 18 перемещения. Полученный в результате этого сравнения сигнал попадает по электрической линии 34 на устройство управления 21 управляющего золотника 20. При незначительном отставании цилиндра 10 подъема-опускания от цилиндра 9 подъема- опускания из-за поступления жидкости через определенное время, необходимое на срабатывание электромеханического преобразователя 21 управляющего золотника 20 после получения электрического сигнала величины рассогласования перемещения датчиков 17, 18 перемещения цилиндров подъема-опускания 9,10, открытие управляющего золотника 20 пропорционально поданному сигналу прохождения жидкости по гидролинии 37 в торцовую полость управляемого золотника 22, открытие последнего под действием поступившей жидкости и на прохождение жидкостью гидролинии 31, сигнал с усилителя-сумматора 57 поступает по электрической линии 42 на распределитель 24 подъема-опускания. Когда его значение по абсолютной величине превысит внешний сигнал, золотник распределителя 24 подъема-опускания перемещается на определенную величину, прикрывая доступ рабочей жидкости по гидролинии 32 в што- ковую полость 13 цилиндра 9 подъема-опускания. Цилиндр 9 подъема-опускания замедляет свой ход и в момент времени, когда движение цилиндров 9,10 подъема- опускания 9,10 синхронизирует, т.е. рассогласование датчиков 17, 18 перемещения будет равно нулю, сигнал с усилителя-сумматора 57 по электрической связи 42 на распределитель 24 подъема-опускания исчезает и под действием внешнего сигнала откроется полностью золотник распределителя 24 подъема-опускания и цилиндр 9 подъема-опускания будет работать на полную мощность. Таким образом, происходит коррекция движения.
Кроме того, после опускания опорной плиты 2 на грунт и вывешивания транспортного средства происходит сравнение сигналов в усилителях-сумматорах 56,58, 59 по электролиниям 52, 53 с датчиков 48, 49 давления, контролирующих рабочее давление в пневмоопорах 3. При разности давлений в пневмоопорах 3, равной давлению питания или нулевому давлению, что соответствует выходу из строя одной или двух пневмоопор 3, с усилителя-сумматора 57 сигнал поступает через элемент 60 сравнения по электролинии 42 на управляющий электромагнит распределителя 24 подъема-опускания, который переключает его в обратное направление ,и рабочая жидкость по гидролинии 33
поступает в поршневую 11 полость цилиндра 9 подъема-опускания, в результате чего последний начинает перемещаться вверх, увлекая за собой датчик 18 перемещения. В
усилителе-сумматоре 55 произойдет сравнение сигналов с датчиков 17 и 18 перемещения, Следствием этого будет подъем опорной плиты 2 в транспортное положение, в котором можно произвести ремонт
или замену пневмоопор 3. Если разность давлений в пневмоопорах 3 меньше давления питания, что соответствует неравномерному заряду пневмоопор 3 или перекосу источника сейсмических сигналов на неровном грунте, то с усилителей-сумматоров 58, 59 в зависимости от знака по электролиниям 50, 51 поступают сигналы на управляющие электромагниты распределителей 46,47. которые, открывая один из распределителей
46, 47, пропускают сжатый воздух по пнев- момагистралям 44 или 45 в пневмоопоры 3 таким образом, что происходит выравнивание давления в неравномерно заряженных пневмоопорах 3 или устранение перекоса
источника сейсмических сигналов на неровном грунте.
Формула изобретения Источник сейсмических сигналов, содержащий систему гидропитания с распределительной гидроаппаратурой и насосом, гидравлический исполнительный механизм с преобразователем-усилителем и опорной плитой, узел виброизоляции, включающий
пневмоопоры, соединенные пневмомагист- ралями с источником сжатого воздуха, механизм подъема-опускания, включающий направляющие, цилиндры подъема-опускания со штоковой и поршневой полостями.
гидрораспределитель с управляющим электромагнитом, соединенный с одним из цилиндров подъема-опускания, и устройство синхронизации, содержащее блок усилителей разности сигналов, датчики синхронизации и электрогидравлический преобразователь, отличающийся тем, что, с целью повышения надежности источника за счет повышения точности синхронизации направляющих стоек, а также за счет
контроля за состоянием пнеомоопор, в пневмомагистралях установлены датчики давления и пневмораспределители с управляющими электромагнитами, при этом выходы датчиков давления и управляющие
электромагниты пневморэспределителей и гидрораспределителей соединены с блоком усилителей разности сигналов.
ел
СО
СЛ
8§
го
-с
СРЕЗ
58
59
г 55
51
Фиг.2


| название | год | авторы | номер документа |
|---|---|---|---|
| Источник сейсмических сигналов | 1986 |
|
SU1390586A1 |
| Источник сейсмических сигналов | 1989 |
|
SU1679437A1 |
| Источник сейсмических сигналов | 1988 |
|
SU1562872A2 |
| Источник сейсмических сигналов | 1989 |
|
SU1679438A1 |
| Источник сейсмических сигналов | 1984 |
|
SU1221628A1 |
| Вибрационный источник сейсмических сигналов | 1988 |
|
SU1583902A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1341598A1 |
| Источник сейсмических сигналов | 1985 |
|
SU1341601A1 |
| Источник сейсмических сигналов | 1985 |
|
SU1341599A1 |
| Источник сейсмических сигналов | 1989 |
|
SU1681290A1 |

Изобретение относится к геофизической технике, а именно к устройствам для возбуждения сейсмических сигналов в грунте- источникам сейсмических сигналов, используемым для поиска нефти и газа. Целью изобретения является повышение надежности источника за счет повышения точности синхронизации направляющих стоек, а также за счет контроля состояния пневмоопор. Источник содержит гидравлический исполнительный механизм с опорной плитой, узел виброизоляции, включающий пневмоо- поры, механизм подъема-опускания, включающий цилиндры подъема-опускания, и устройство синхронизации, включающее блок усилителей разности сигналов, датчики перемещения и электрогидравлический преобразователь. Пневмоопоры соединены с компрессором пневмомагистралями, в которых установлены распределители и датчики давления, причем управляющие магниты этих распределителей и выходы датчиков давления воздуха соединены с усилителем разности сигналов. 2 ил.(/)
| Патент США № 3159233 | |||
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Патент США №3306391, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1390586A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
