Изобретение относится к геофизической технике, а именно к устройствам для возбуждения сейсмических сигналов в грунте при проведении сейсмических работ, используемых для поиска нефти и газа.
Цель изобретения - повышение надежности источника за счет повышения стабильности работы устройства синхронизации.
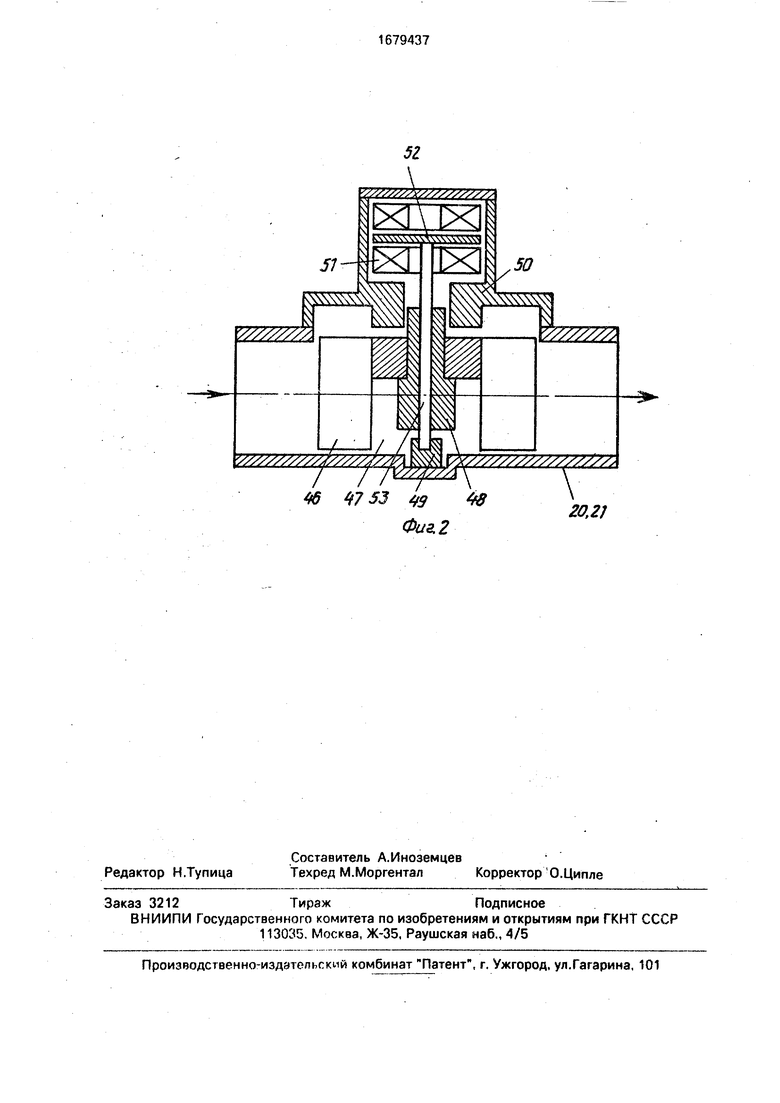
На фиг.1 представлена гидросхема источника; на фиг.2 - расходомер.
Источник сейсмических сигналов содержит гидравлический исполнительный механизм 1 с полостями 2 и 3, преобразователем-усилителем 4 и опорной плитой 5, узел 6 виброизоляции, механизм 7 подъема- опускания, включающий направляющие устройства 8 и 9 с направляющими стойками 10 и 11, цилиндры 12 и 13 подъема-опускания с поршневыми полостями 14 и 15 и штоковыми полостями 16 и 17, устройство
18синхронизации, включающее усилитель
19разности сигналов, расходомеры 20 и 21 и электрогидравлический преобразователь 22, состоящий из управляющего золотника 23 с преобразователем 24 электромеханическим и управляемого золотника 25 с датчиком 26 положения местной обратной связи, распределитель 27 подъема-опускания, систему 28 гидропитания с насосом 29 и предохранительный клапан 30.
Вход электрогидравлического преобразователя 22 соединен гидролиниями 31 и 32 с системой 28 гидропитания, а выход гидролиниями 33 и 34 с цилиндром 13 подъема- опускания. Второй цилиндр 12 подъема-опускания соединен гидролиниями 35 и 36 с распределителем 27 подъема- опускания. Преобразователь 24 электромеханический соединен электрической связью 37 с усилителем 19 разности сигналов, связанным электролиниями 38 и 39 с датчиками 20 и 21 синхронизации, ус- тановлеными в гидролиниях 34 и 35. Выход управляющего золотника 23 соединен гидроканалами 40 и 41 с торцовыми камерами управляемого золотника 25, а вход последнего гидроканалами 42 и 43 соединен с гидролиниями 31 и 32. Датчик 26 положения местной обратной связи связан электролинией 44 с усилителем 19 разности сигналов, связанным электролинией 45 с преобразователем-усилителем 4.
Расходомеры 20 и 21, играющие роль датчиков синхронизации, состоят из крыльчатки 46, камеры 47 крыльчатки, втулки 48, подшипника 49, корпуса 50 и пропорционального преобразователя 51 вращения крыльчатки 46 в электрический сигнал, имеющий диск 52, снабженного осью 53, жестко связанной через втулку 48 с крыльчаткой 46. Источник работает следующим образом.
Для приведения источника из транспортного положения в рабочее рабочая жидкость по гидролинии 32 от насоса 29 подается к электрогидравлическому преобразователю 22 и на распределитель 27 подъ0 ема-опускания, который по команде от внешнего сигнала включается на опускание опорной плиты 5. Далее по гидролинии 35 через датчик 21 синхронизации рабочая жидкость поступает в штоковую полость 16
5 цилиндра 12 подъема-опускания. Последний начинает перемещаться вниз. При прохождении жидкости через расходомер 21 или датчик синхронизации приводится во вращение крыльчатка 46, которая приводит
0 в движение втулку 48, ось 53 и диск 52, который, вращаясь между обмотками катушки 51, вызывает в последней электрический сигнал, пропорциональный вращению крыльчатки 46, и, следовательно, расходу
5 жидкости, пройденной через датчик 21 синхронизации. Полученный электрический сигнал по электролинии 39 поступает на усилитель 19 разности сигналов. В последнем происходит сравнивание сигналов с
0 датчиков 20 и 21 синхронизации. Так как в данный момент сигнал с датчика 20 синхронизации не изменился, то рассогласование сигналов с усилителя 19 разности сигналов поступает на преобразователь 24 электро5 механический управляющего золотника 23 электрогидравлического преобразователя 22. Происходит прямое открытие управляющего золотника 23 пропорционально поданному сигналу, и рабочая жидкость по
0 гидролиниям 40 поступает в торцовую полость управляемого золотника 25, вследствие чего последний перемещается под действием поступившей рабочей жидкости на прямое открытие. Рабочая жидкость по
5 гидроканалу 43 поступает в управляемый золотник 25 и далее по гидролинии 34 попадает в штоковую полость 17 цилиндра 13 подъема-опускания, проходя через датчик 20 синхронизации, сводя, таким образом,
0 рассогласование сигналов на усилителе 19 разности сигналов к нулю. Таким образом в штоковую полость 17 цилиндра 13 подъема- опускания попадает такое же количество рабочей жидкости, как и в штоковую полость
5 15 цилиндра 12 подъема-опускания.
При этом рабочая жидкость из поршневой полости 15 цилиндра 13 подъема-опускания по гидролинии 33, гидроканалу 42, а из цилиндра 12 подъема-опускания по гидролинии через распределитель 27 подъемаопускания попадает в гидролинию 31 и затем в систему гидропитания. Опорная плита 5 опускается на грунт и прижимается частью массы транспортного средства. Направление движения и удержание опорной плиты 5 относительно транспортного средства производится направляющими устройствами 8 и 9.
Затем управляющий сигнал подается на преобразователь-усилитель 4, вследствие чего последний соединяет полости 2 и 3 исполнительного механизма 1 поочередно или с напорной линией 32, или с линией 31 слива. Таким образом исполнительный механизм 1 вырабатывает сейсмические колебания и передает их через опорную плиту 5 в грунт. Виброизоляция транспортного средства осуществляется узлом б виброизоляции.
После сеанса развертки опорная плита 5 с исполнительным механизмом 1 поднимается в транспортное положение. Операция осуществляется в обратном порядке Путем включения распределителя 27 подъема-опускания в обратное направление. При этом жидкость из штоковых полостей 16 и 17 цилиндров 12 и 13 подъема-опуска- ния проходит через датчики 20 и 21 синхронизации, которые вырабатывают электрический сигнал пропорционально пройденному расходу жидкости. Выработанные электрические сигналы сравниваются в усилителе 19 разности сигналов, и движения цилиндров 12 и 13 подъема-опускания синхронизируются аналогично операции опускания. Рабочее давление поддерживается клапаном 30. Для увеличения точности синхронного перемещения цилиндров 12 и 13 подъема-опускания введена местная обратная связь, контролирующая перемещение управляемого золотника 25 электрогидравлического преобразователя 24 по сравнению с перемещением управляющего золотника 23.
Контроль происходит следующим образом. Сигнал о перемещении управляемого золотника 25 с датчика 26 положения местной обратной связи попадает по электролинии 44 в усилитель 19 разности сигналов и сравнивается с рассогласованием датчиков 20 и 21 синхронизации. Полученный в результате этого сравнения сигнал попадает
по электрической линии 37 на устройство управления управляющего золотника 23. Таким образом происходит коррекция движения. Для избежания включения преобразователя-усилителя 4 в момент опускания исполнительного механизма 1 с опорной плитой 5 введена электрическая связь 45, соединяющая усилитель 19 разности сигналов w преобразователь-усилитель А,
При завершении процесса подъема или опускания цилиндры 12 и 13 подъема-опускания останавливаются, прекращается ток рабочей жидкости, прекращают работу датчики 20 и 21 синхронизации, сигнал с которых не подается на усилитель разности сигналов, и, следовательно, на преобразователь-усилитель 4. Последний освобождается и при нахождении опорной плиты 5 на грунте и подаче на него управляющего сигнала вырабатываются сейсмические колебания. Так как устройство синхронизации включает расходомеры, которые нечувствительны к вибрации, то оно работает стабильно, за счет чего повышается надежность
источника.
Формула изобретения Источник сейсмических сигналов, содержащий систему гидропитания с распределительной гидроаппаратурой и насосом,
гидравлический исполнительный механизм с преобразователем-усилителем и опорной плитой, узел виброизоляции и механизм подъема-опускания, включающий направляющие, два цилиндра подъема-опускания
со штоковой и поршневой полостями, распределитель, соединенный с одним из цилиндров подъема-опускания, и устройство синхронизации, содержащее усилитель разности сигналов, датчики синхронизации и
электрогидравлический преобразователь, отличающийся тем, что, с целью повышения надежности, датчики синхронизации выполнены в виде двух расходомеров, установленных в гидромэгистралях, соединяющих верхние полости соответственно первого и второго цилиндров подъема-опускания с электрогидравлическим преобразователем, при этом усилитель разности сигналов соединен электрической линией с
преобразователем-усилителем, а каждый расходомер электрической линией соединен с усилителем разности сигналов.
51


| название | год | авторы | номер документа |
|---|---|---|---|
| Источник сейсмических сигналов | 1989 |
|
SU1755225A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1390586A1 |
| Источник сейсмических сигналов | 1988 |
|
SU1562872A2 |
| Источник сейсмических сигналов | 1989 |
|
SU1679438A1 |
| Источник сейсмических сигналов | 1984 |
|
SU1221628A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1341598A1 |
| Источник сейсмических сигналов | 1985 |
|
SU1341599A1 |
| Вибрационный источник сейсмических сигналов | 1988 |
|
SU1583902A1 |
| Источник сейсмических сигналов | 1984 |
|
SU1226380A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1341600A1 |
Изобретение относится к геофизической технике, а именно к устройствам для оозбуждения сейсмических сигналов в грунте, используемых для поиска нефти и газа, Источник содержит гидравлический, исполнительный механизм 1 с преобразователем- усилителем 4 и опорной плитой 5, механизм 7 подъема-опускания, включающий цилиндры 12, 13 подъема-опускания, и устройство 18синхронизации, включающее усилитель 19разности сигналов и датчики 20, 21 синхронизации, выполненные в виде расходомеров, электрогидравлический преобразователь 22 и систему 28 гидропитания. 2 ил. V12 . 43 2J Qs VI Ю N СО V4 32
/ / Т- 46 47 S3 w
20,21
| Источник сейсмических сигналов | 1984 |
|
SU1221628A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Источник сейсмических сигналов | 1986 |
|
SU1390586A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
