Изобретение относится к съемным грузозахватным приспособлениям и может быть использовано в пищевой, химической и других областях промышленности при выполнении перегрузочных операций с мягкими контейнерами, заполненным сыпучими материалами, в том числе мукой, крупой, минеральными удобрениями и т. п.
Целью изобретения является повышение удобства эксплуатации и производительности.
Применение изобретения позволяет перемещать грузы на большее расстояние в помещениях с ограниченной высотой.
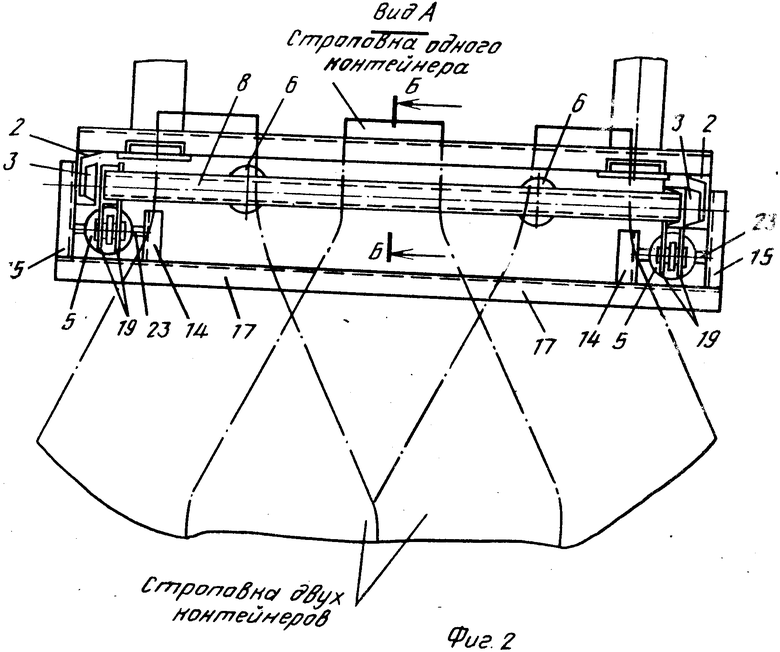
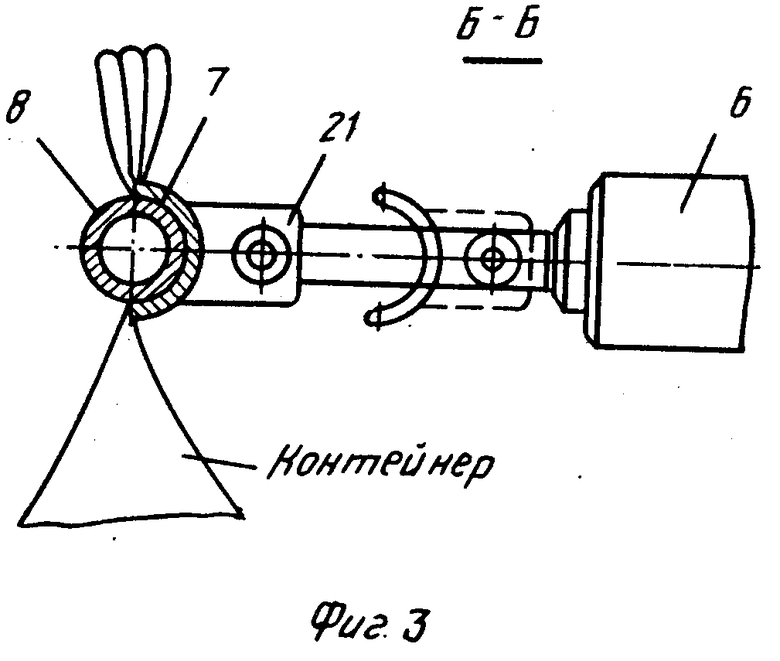
На фиг. 1 изображен общий вид устройства для захвата; на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 2.
Устройство для захвата грузов, преимущественно мягких контейнеров содержит раму 1, захват и механизм его перемещения по горизонтали. Механизм перемещения захвата состоит из укрепленных на раме 1 балок 2, свободно расположенных в них посредством роликов 3 направляющих 4 укрепленных на раме 1 двух пар силовых цилиндров 5, 6 одна из которых расположена снаружи под балками 2, а другая между направляющими 4. При этом захват состоит из расположенных между направляющими 4 подвижной и неподвижной губок 7, 8. Штоки 9 наружных силовых цилиндров 5 связаны с направляющими 4, а штоки 10 внутренних с подвижной губкой 7.
Рама 1 состоит из надеваемых на лапы 11 авто- и электропогрузчика (не показан) поперечных швеллеров 12, 13 вспомогательных швеллеров 14, 15 и поперечных швеллеров 16, 17. Рама 1 жестко крепится к лапам 11 посредством болтов 18. Ролики 3 связаны с направляющими 4 при помощи кронштейнов 19. На боковой поверхности подвижной губки 7 размещены ролики 20 для взаимодействия с направляющими 4, а подвижная губка 7 имеет кронштейн 21 для шарнирной связи со штоками 10 силовых цилиндров 6.
На направляющих 4 снизу расположены кронштейны 19 для шарнирного соединения со штоками 9 силовых цилиндров 5. На поперечных швеллерах 16 и 17 посредством кронштейнов 22 и пальцев 23 соответственно укреплены силовые цилиндры 6 и 5. Устройство захвата мягких контейнеров работает следующим образом.
Рама 1 закрепляется на лапах 11 авто- или электропогрузчика с помощью болтов 18. Горловина мягкого контейнера вставляется между подвижной 7 и неподвижной 8 губками и зажимается силовыми цилиндрами 6. При помощи подъемного механизма авто- или электропогрузчика контейнер поднимается и затем перемещается к месту временного хранения или погрузки в транспортное средство. Погрузка контейнера в транспортное средство осуществляется сначала по дальнему борту при помощи механизмов перемещения захвата, включающего балки 2, ролики 3, направляющие 4 и силовые цилиндры 5. При включении силовых цилиндров 5 усилие передается через кронштейны 19 направляющим 4, которые начинают перемещаться по балкам 2 при помощи роликов 3. Величина перемещения направляющих 4 соответствует величине хода штоков 9 силовых цилиндров 5. После установки контейнера к дальнему борту кузова транспортного сpедства сpабатывают силовые цилиндры 6 (штоки 10 задвигаются), высвобождая горловину контейнера из подвижной 7 и неподвижной 8 губок. Загрузка контейнеров к ближнему борту транспортного средства осуществляется без применения механизма перемещения захвата. Затем цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ К ПОГРУЗЧИКАМ ДЛЯ КОНТЕЙНЕРОВ | 1988 |
|
SU1533213A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ГОРЛОВИНЫ МЯГКОЙ ТАРЫ | 1987 |
|
SU1438145A1 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ГОРЛОВИНЫ МЕШКА К НАПОЛНИТЕЛЬНЫМ МАШИНАМ | 1990 |
|
SU1835729A1 |
| Погрузчик для кантования,транспортировки и укладки изделий | 1974 |
|
SU540817A1 |
| Устройство для рагзрузки подвесного конвейера | 1979 |
|
SU829513A1 |
| ЗАХВАТ УСТРОЙСТВА ДЛЯ РАЗГРУЗКИ КОНТЕЙНЕРОВ В КУЗОВ МУСОРОВОЗА | 1999 |
|
RU2177901C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 2004 |
|
RU2268827C1 |
| КЛЕЩЕВОЙ ЗАХВАТ | 1996 |
|
RU2106220C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ КОНТЕЙНЕРОВ | 2004 |
|
RU2264308C1 |
Изобретение относится к съемным грузозахватным приспособлениям и может быть использовано в пищевой, химической и других областях промышленности при выполнении перегрузочных операций с мягкими контейнерами, заполненными сыпучими материалами, в том числе мукой, крупой, минеральными удобрениями и т.п. Целью изобретения является повышение удобства эксплуатации и производительности. Горловина мягкого контейнера зажимается между неподвижной 8 и подвижной 7 губками с помощью силовых цилиндров 6. Затем направляющие вместе с контейнером перемещаются силовыми цилиндрами 5 по балкам 2 посредством роликов 3. После выдвижения контейнера штоки 10 силовых цилиндров 6 отжимают подвижную губку 7 и контейнер устанавливается в заданном месте. 3 ил.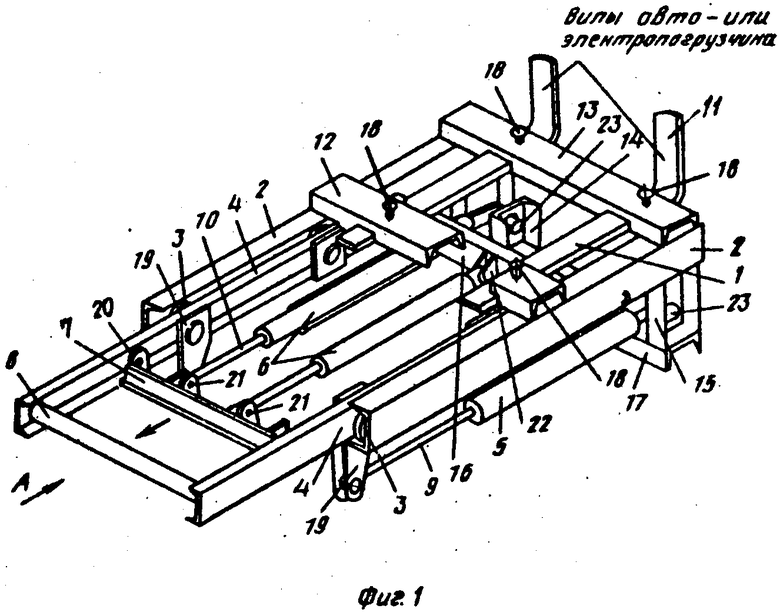
УСТРОЙСТВО ДЛЯ ЗАХВАТА ГРУЗОВ, преимущественно мягких контейнеров, содержащее раму, захват и механизм его перемещения по горизонтали, отличающееся тем, что, с целью повышения удобства эксплуатации и производительности, механизм перемещения захвата состоит из укрепленных на раме балок, свободно расположенных в них посредством роликов направляющих и укрепленных на раме двух пар силовых цилиндров, одна из которых расположены снаружи под балками, а другая между направляющими, при этом захват состоит из расположенных между направляющими подвижной и неподвижной губок, штоки наружных силовых цилиндров связаны с направляющими, а внутренних с подвижной губкой.
| Агарев Е.М | |||
| и Момот В.В | |||
| Механизация погрузочно-разгрузочных, транспортных и складских работ на холодильниках | |||
| М.: Легкая и пищевая промышленность, 1984, рис.42, с.71. |
