(54} УСТРОЙСТВО ДЛЯ РАЗГРУЗКИПОДЙЕСКОГО КОеВЕЙВРА
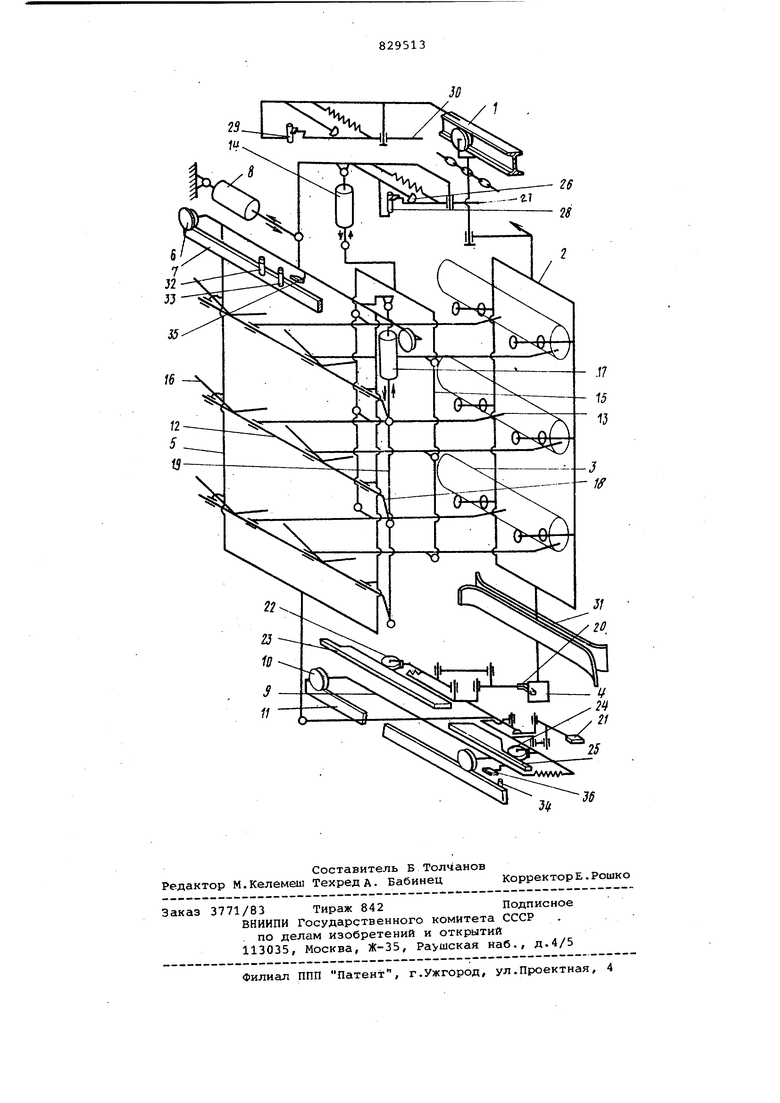
папами рычагов 13, поворотнь «и от силового цилиндра (пнев к цилиндра) 14 через тяги 15 и перегрузочные призмы 16, поворотные от привода (пневмоцилиндрз) 17 через рялчаги 18 и тяги 19. Ориентирующая балка 9 несет на себе фиксатор кромитейна 4 подвески 2, состояш.лй из двух независи ых губок 20 и 21, Губка 20 чере рычаги и ролик 22 опирается на непо-движный копир 23, а губка 21 через рычаги и ролик 24- на неподвижный копир 25, Копиры 23 и 25 установлены вдоль трассы подвесного конвейера и являЕотся механизмом управления губками , В верхней части подвижной рамкя расположена подпружиненная к упору 26 собачка 27 j, взаимодействующая с подвеской 2 конвейера, и датчик 28 включения прямого хода пневмоцилиндра 8. В конце позиции разгрузки установлен датчик 29 включения обратного хода пневмоцилиндра 8, взаимодействующий с подвеской через подпружиненный рычаг 30. По всей длине позиции разгрузки установлены направляющие 31 для кронтшейна 4, осуществляющие его поочередное ориентирование. Датчики 32 и 33, управляющие работой пневмоцилиндра 14, и датчик 34, управляющий работой пневмоцилиндра 17, размещены на пути перемещения рамки и балки, взаимодействуют с их флажками 35 и 36.
Устройство работает следующим образом.
Подвеска 2 с окрашенными изделиями 3 подходит к разгрузочному устройству, при этом кронштейн 4 подвески входит в направлякяцие 31 Когда кронштейн достигает выдвинутой в рабочее положение губки 20, верхняя часть подвески проходит через собачку 27, связанный с ней датчик 28 вклгочает прямой ход пневмоцилиндра , 8 к pajiiKa 5 вместе с балкой: 9 движется по направляющим 7 и 11, догоняет подвеску 2 и дальнейшее перемещение осуществляет вместе с ней, опираясь на нее собачкой 27, В процессе этого пере1У1ещения ролик 24, следуя по копиру, выдвигает губку 21 в рабочее положение, кронштейн 4 зажимается губками с обеих сторон. В результате этого рамка и подвеска оказываются соединенными между собой в верхней и нижней части и перемещаются со скоростью конвейера как одно целое.
При дальнейшем движении подвижной рамки 5 флажок 35 воздействует на датчик 33р срабатывает пневмоцилиндр 14, поднимая рычаги 13, и изделия 3 с подвески скатываются по рычагам 13 в перегрузочные призмы 16.
Следующий по ходу движения датчик 32 дает команду пневмоцилиндру 14 на
опускание рычагов 13 в исходное положение, при этом снятые с подвески изделия остаются в призмах 16. Изделия с подвески сняты, но рамка и подвеска продолжают двигаться вместе до тех пор, пока позволяет ход пориня пневмоцилиндра 8 и пока не будет освобожден кронштейн 4. При движении рамки ролик 22 опускается по копиру 23 и губка отходя в сторону освобождает кронштейн 4 подвески, Подвижная
6 рамка останавливается, а подвеска 2 уходит вперед.
При дешьнейшем движении конвейера, подвеска верхней частью набегает .на подпружиненный рычаг 30, взаимодейст5вующий с датчиком 29 включения обратного хода пневмоцилиндра 8, и рамка возвращается в исходное положение разгрузки. При возвратном движении ролик 24 опускается по копиоу 25 и губка 21 открывается, занимая нерабочее положение, второй ролик 22, поднимаясь по копиру 23, устанавливает губку 20 в рабочее положение. В момент остановки подвижной рамки от Флажка 36 срабатывает датчик 34
5 пневмоиилиндра 17 и через тяги 19 и рычаги 18 опрокидывает призмы 16, сбрасывая изделия в приемное устройство (не показано).
Устройство готово к приему и разгрузке следующей подвески конвейера.
Формула изобретения
5
1. Устройство для разгрузки подвесного конвейера, включающее перемещающуюся синхронно с подвеской конвейера от приводного механизма рамку, на которой размещен поворотный от силового цилиндра захват для изделий, отличающееся тем, что, с целью повышения надежности работы, оно снабжено установленным на рамке фиксатором подвески, выполненным в виде поворотных губок и механизмом
5 управления губками, выполненным в виде копиров, установленных вдоль трассы подвесного конвейера в месте нагрузки, при этом каждая из губок имеет кинематически связанный с ней ролик, установленный с возможностью взаимодействия с копиром.
2. Устройство ПОП.1, отличающееся тем, что .рамка имеет призмы приема изделий с захвата,при
5 этом призмы выполнены поворотными посредством привода.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 181536, кл. В 65 G 47/74, 1965.
2.Авторское свидетельство СССР № 612868, кл. В 65 G 47/36, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки подвесного конвейера | 1980 |
|
SU905173A1 |
| Устройство для перегрузок подвесок подвесного конвейера с одного пути на другой | 1974 |
|
SU682431A1 |
| Поворотная подвеска грузонесущегопОдВЕСНОгО КОНВЕйЕРА | 1979 |
|
SU814818A1 |
| Устройство для контроля и сорти-РОВКи ЕМКОСТЕй | 1979 |
|
SU848096A1 |
| Устройство для загрузки изделий на подвесной конвейер | 1979 |
|
SU872402A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для передачи изделий | 1982 |
|
SU1093486A1 |
| Подвеска подвесного конвейера | 1979 |
|
SU781128A1 |
| Машина для промывки изделий | 1981 |
|
SU995902A1 |
| ПОДВЕСКА ПОДВЕСНОГО ТОЛКАЮЩЕГО КОНВЕЙЕРА ДЛЯ КУЗОВА АВТОМОБИЛЯ | 2003 |
|
RU2253603C1 |