Изобретение относится к оборудованию для распыления жидкостей и превращению их в аэрозоли, может использоваться в закрытом помещении, например, при профилактических и лечебных обработках животн ых и птии и является усовершенствованием изобретения по авт.св. № 1426651.
Цель изобретения - увеличение дисперсности получаемого аэрозоля.
На Фиг. 1 показан робот, общий вид, в разрезе; на Фиг. 2 - диски распыления, вид сверху (расположение поцпружиненных контактов не обозначено) с
Робот имеет основание 1, стойки 2, емкость 3 с отверстием 4 для. заливки раствора. В основании закреплен подшипник 5, в котором расположен конец вала 6, имеющего гибкую часть 7, червячную передачу 8, находящуюся в постоянном зацеплении с шестерней
9 валов 10, снабженных кулачками (не показаны), изменяющими положение подпружиненных толкателей 1 Ъ и колесами 12. Одно из них имеет шкив 13.
Ь основанию прикреплены направляющие стержни 14 с пружинами 15. В верхних частях их размешены направляющие стержни 16 подвижной пластины 17. На ней размещены реверсивные электродвигатели 18. Валы их несут конические шестерни J9, находящиеся в постоянном зацеплении с шестернями 20 и 21. Вал 22 имеет шестерню 23, соединенную через промежуточную шестерню 24 с шестерней 25 вала 26. Он несет крыльчатку-ветродуйку 27 и диск 28 мелкого распыления. На конце вала 23 закреплен диск 29 гр/бого распыления, снабженный направляющей воронкой 30.
Крыльчатка-ветродуйка размещена в кожухе 31, снабженном отверстиями 32
:л
&
У1
;л
го ;о
к
для поступления воздуха. Между кожухом и диском мелкого распыления (испарителем) имеется щель 33. Колеса робота размещены в направляющих 34, установленных выше животных вдоль длинной оси помещения. Сверху емкости находится магнитный привод 35 штока 36, имеющего металлическое кольцо 37 и нижнюю коническую часть 38, запирающую отверстие 39,,переходящее в гибкий патрубок 40. Шток размещен в цилиндре 41, снабженном отверстиями 42 и лопастями 43 мешалки с отверстиями 44. Верхняя часть цилиндра снабжена конической шестерней 45, находящейся в постоянном зацеплении с шестерней 46 вала 47, снабженного на конце шкивом 48, соединенного клиновидной ременной передачей 49 со шкивом колеса робота.
В одной стороне емкости размещен цилиндр 50 с отверстиями 51 . В нем перемещается поплавок 52 со штоком 53, проходящим между частями компьютера-дозатора 54 расхода раствора за один сеанс. Он имеет переключатель 55, изменяющий дозировку подачи раствора на распыление за один сеанс. Сбоку емкости укреплено водомерное стекло 56.
Робот снабжен размещенными над диском 28 мелкого распыления диаметрально противоположно друг другу подпружиненными контактами 57.
Электродвигатели 18, магнитный привод 35, компьютер-дозатор 54, подпружиненные контакты 57 соединены единой электрической цепью, вклюВ заданное время реле времени включает в сеть электрическую цепь робота. После этого начинают работать электродвигатели 18. Вращение шестерен 19 валов приводит во вращение шестерни 20 и 21.
Через шестерню 20 вращение передается валу 6, нижний конец которого
Ю находится в подшипнике 5 основания 1 . Шестерня 8 приводит во вращение шестерню 9 валов 10. Кулачки их Сне показаны) поочередно поднимают то один, то другой подпружиненный толкатель 1 ..
Под нажимом их изменяется уровень наклона подвижной пластины 17. Направляющие стержни 16, преодолевая силу пружин 15, приближаются к направляющим стержням 14 основания 1. В связи
20 с этим происходит распыление аэрозоля по разным уровням горизонта воздуха помещения.
Изменению уровня наклона подвижной пластины 17 вал 6 не препятствует,
25 так как имеет гибкую часть 7.
Вращение валов 10 передается на колеса 12, робот начинает перемещаться по направляющим 34 вдоль помещения. Через клиновидную ременную передачу
30 49 вращение шкива 13 передается на шкив 48, вал 47, шестерни 46 и 45 и далее на цилиндр 41. Прикрепленные к нему лопасти 43 мешалки, перемещаясь, перемешивают раствор в ,с сти 3. Этому способствуют и отверстия 44,
Вращение шестерен 19 валов электродвигателей 18, одинаковых по частоте вращения, мощности и другим парамет- чаемой в работу реле времени по задан- рам передается на шестерню 21 вала
22. Закрепленный на нем диск 29 грубого распыления начинает вращаться, допустим, слева направо.
Вращение вала 22 через шестерни ic 23-25 приводит во вращение, но уже справа налево, вал 26, крылъчатку- ветродуйку 27, диск 28 мелкого распыления .
При включении электроцепи робота
ной программе и выключаемой компьютером-дозатором расхода раствора за один сеанс.
Робот работает следующим образом.
Ј емкость 3, установленную на стойках 2, через отверстие 4 наливается нужный раствор. Степень наполнения контролируют по водомерному стеклу 56.
50
Устанавливают переключатель 55 компьютера-дозатора 54 на заданный расход раствора за один сеанс работы, реле времени, установленного за пределами помещения, например в тамбуре, . задают программу времени включения ее робота в работу, допустим в 24 ч каждых суток, т.е. на то время, когда в помещении нет обслуживающего персонала.
магнитный привод 35 притягивает металлическое кольцо 37 и приподнимает шток 36 с коническим концом 38. В результате этого раствор через отверстия 42 цилиндра 4J и открытое отверстие 39 начинает поступать в тиб- кий патрубок 40 и далее на диск 29 грубого распыления раствора. Ввиду того, что подвижная пластина 17 постоянно изменяет уровень наклона,
В заданное время реле времени включает в сеть электрическую цепь робота. После этого начинают работать электродвигатели 18. Вращение шестерен 19 валов приводит во вращение шестерни 20 и 21.
Через шестерню 20 вращение передается валу 6, нижний конец которого
находится в подшипнике 5 основания 1 . Шестерня 8 приводит во вращение шестерню 9 валов 10. Кулачки их Сне показаны) поочередно поднимают то один, то другой подпружиненный толкатель 1 ..
5 Под нажимом их изменяется уровень наклона подвижной пластины 17. Направляющие стержни 16, преодолевая силу пружин 15, приближаются к направляющим стержням 14 основания 1. В связи
0 с этим происходит распыление аэрозоля по разным уровням горизонта воздуха помещения.
Изменению уровня наклона подвижной пластины 17 вал 6 не препятствует,
5 так как имеет гибкую часть 7.
Вращение валов 10 передается на колеса 12, робот начинает перемещаться по направляющим 34 вдоль помещения. Через клиновидную ременную передачу
0 49 вращение шкива 13 передается на шкив 48, вал 47, шестерни 46 и 45 и далее на цилиндр 41. Прикрепленные к нему лопасти 43 мешалки, перемещаясь, перемешивают раствор в с сти 3. Этому способствуют и отверстия 44,
магнитный привод 35 притягивает металлическое кольцо 37 и приподнимает шток 36 с коническим концом 38. В результате этого раствор через отверстия 42 цилиндра 4J и открытое отверстие 39 начинает поступать в тиб- кий патрубок 40 и далее на диск 29 грубого распыления раствора. Ввиду того, что подвижная пластина 17 постоянно изменяет уровень наклона,
возможно непопадание раствора нЈ диск 29, Направляющая воронка 30 предотвращает это.
Попавший на диск 29 грубого распыления раствор под действием центробежной силы и дотока воздуха, образуемого его лопастями, разбивается на частицы аэрозоля, срывающиеся с периферии. Навстречу ему вращается диск 28 мелкого распыления-. Ввиду того, , что к диску 28 через подпружиненные контакты 57 подводится электроток, он нагревается настолько, что попа- даемые на него с диска 29 грубого распылителя частицы аэрозоля преобразуются в пар, состоящий из мельчайших частиц аэрозоля, в этом случае диск 28 мелкого распыления выполняет функции испарителя.
При отключении подпружиненных контактов 57 от электроцепи робота частицы аэрозоля, сорвавшиеся с диска 29 грубогб распыления,попадают на лопасти диска 28. В этом случае частицы аэрозоля превращаются в мелкие без их испарения. В дальнейшем они центробежной силой и потоком воздуха, образуемым лопастями диска, отодвигаются все далее от центра и срываются с его периферии.
Одновременно вращающаяся крылъчат- ка-ветродуйка 27, засасывая воздух через отверстия 32 кожуха 31, превращает его в мощный поток. Он выбрасывается через щель 33.
Срывающиеся с периферии диска 28 мелкого распыления (испарителя) мельчайшие .(туманообразные) или мелкие частицы аэрозоля попадают в щель 33. В это время они подхватываются потоком воздуха, приподнимаются и разбрасываются по ра,зным уровням горизонта воздуха. Оседая, частицы аэрозоля выполняют предназначенную им роль (очищая, дезинфицируя, дезодо- рируя, дезинсецируя воздух помещения, насыщают его лекарственными веществами) .
0
5
Под влиянием электромагнитных полей, образуемых электродвигателями, магнитным приводом, подпрулгиненнымя контактами и т.д., частицы аэрозоля заряжаются отрицательно.
По мере расхода раствора уменьшается его уровень и в цилиндре 50 (он попадает в него через отверстия 51). При понижении уровня раствора опускается поплавок 52. Его шток 53 в это время проходит между частями компьютера-дозатора 54. Как только шток 53 дойдет до заданного ,уровня расхода раствора эа один сеанс, компьютер-дозатор 54 устанавливает выдачу такого же количества раствора в следующий сеанс и выключает электрическую цепь робота из электриче0 ской сети помещения. .Включение- его в работу в заданное время осуществляет реле времени.
Если робот по направляющим 34 дошел до упругого конца помещения, но
5 не прекратил в аэрозоль заданное количество раствора, концевые переключатели (не показаны) переводят его движение на обратный ход.
Таким образом, при включении под0 пружиненных контактов в электрическую сеть робота робот выдает мельчайший аэрозоль в виде тумана, при отключении же их происходит измельчение раствора до мелких частиц аэрозоля, а
. вся работа осуществляется без вмешательства- оператора в заданное им время.
Формула изобретения
0
Робот для распыления аэрозоля по
авт.св. № 1426651.отличающийся тем, что, с целью увеличения дисперсности получаемого аэроэо- 5 ля, он снабжен размещенными над диском мелкого распыления диаметрально противоположно друг другу подпружиненными контактами, включенными в электрическую цепь питания.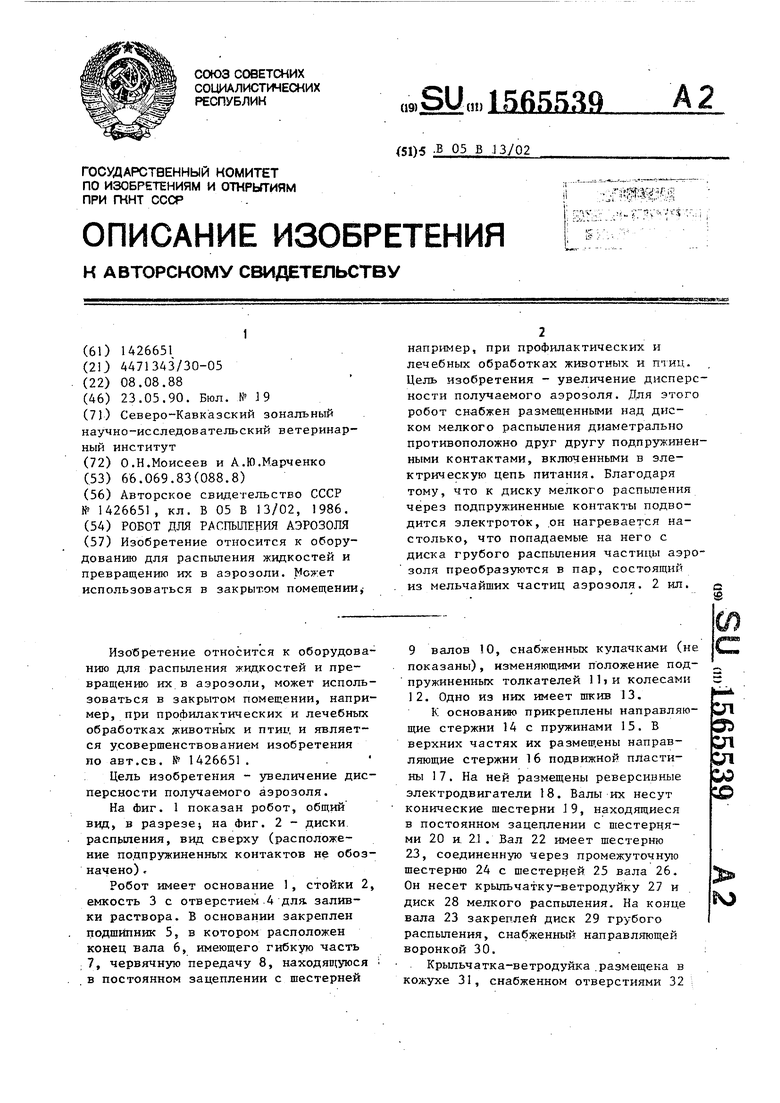
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот для распыления аэрозоля | 1986 |
|
SU1426651A2 |
| УСТРОЙСТВО ДЛЯ РАССЕИВАНИЯ АЭРОЗОЛЯ В ЗАКРЫТОМ ПОМЕЩЕНИИ | 2002 |
|
RU2255815C2 |
| АЭРОЗОЛЬНАЯ МОБИЛЬНАЯ УСТАНОВКА | 2000 |
|
RU2180273C1 |
| УСТРОЙСТВО ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ОРТОПЕДИЧЕСКИХ ЗАБОЛЕВАНИЙ У ЖИВОТНЫХ, НАПРИМЕР У КРУПНОГО РОГАТОГО СКОТА | 2008 |
|
RU2380057C1 |
| Робот для распыления аэрозоля | 1985 |
|
SU1263367A1 |
| УСТРОЙСТВО, ОБРАЗУЮЩЕЕ И РАССЕИВАЮЩЕЕ АЭРОЗОЛЬ | 2006 |
|
RU2315667C1 |
| УСТРОЙСТВО ОБРАЗУЮЩЕЕ И РАССЕИВАЮЩЕЕ АЭРОЗОЛЬ | 2006 |
|
RU2318609C1 |
| Устройство для рассеивания аэрозоля в закрытом помещении | 1990 |
|
SU1720737A2 |
| Устройство для распыления аэрозоля в закрытом помещении | 1989 |
|
SU1657231A1 |
| Устройство для рассеивания аэрозоля в закрытом помещении | 1989 |
|
SU1643106A1 |

Изобретение относится к оборудованию для распыления жидкостей и превращению их в аэрозоли. Может использоваться в закрытом помещении, например, при профилактических и лечебных обработках животных и птиц. Цель изобретения - увеличение дисперсности получаемого аэрозоля. Для этого робот снабжен размещенными над диском 28 мелкого распыления диаметральнопротивоположно друг другу подпружиненными контактами 7, включенными в электрическую цепь питания. Благодаря тому, что к диску 28 мелкого распыления через подпружиненные контакты 57 подводится электроток, он нагревается настолько, что попадаемые на него с диска 29 грубого распыления частицы аэрозоля преобразуются в пар, состоящий из мельчайших частиц аэрозоля. 2 ил.
Pvr.f
28
Л
| Робот для распыления аэрозоля | 1986 |
|
SU1426651A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
