в камерах становится меньше Р (в ре- 55 лиРУется таким же образом как и рас- зультате уменьшения плотности или сте- ход жидкости. Если давление газа в тру- пени заполнения камер), то весовая бопроводе 2 больше, чем в трубопроводе система вместе с втулкой 4 поворачи- 3 и каналах 16, 13, то ротор 7 вается по часовой стрелке, т.е. впра- вращается без дополнительного привода
за счет разности давлений на лопастях. В этом случае необходимо стабилизировать частоту вращения ротора 7.
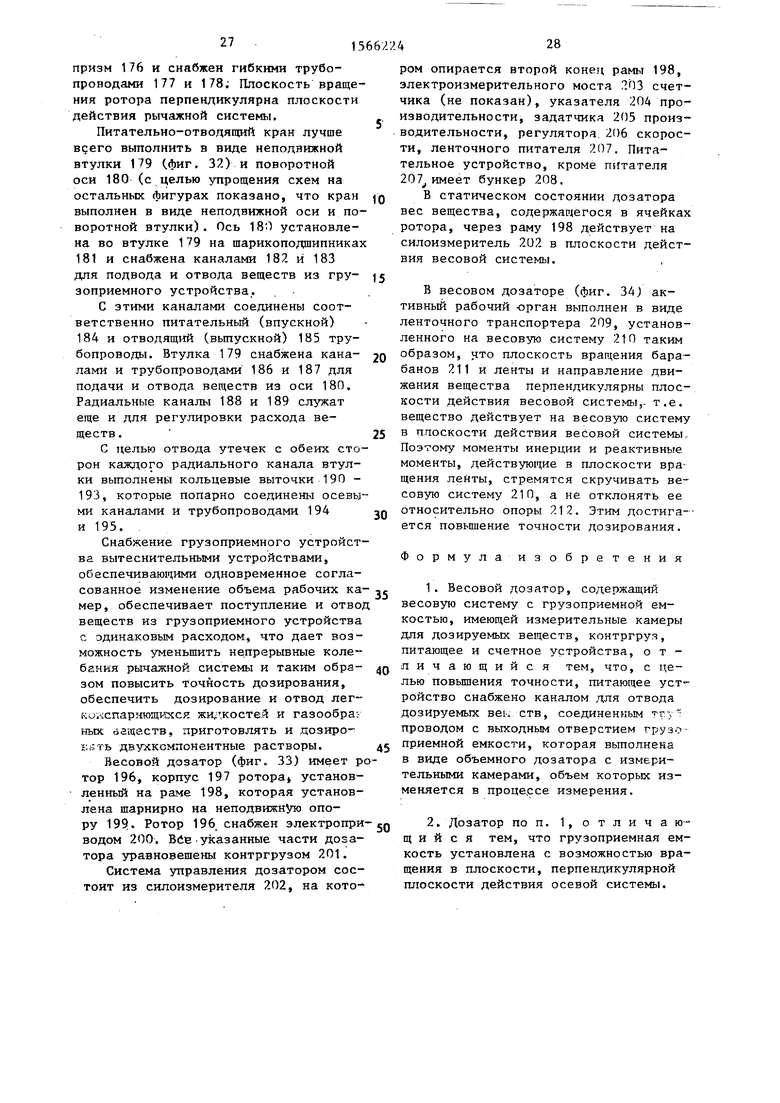
В весовом дозаторе (фиг. 2) каждая камера грузоприемного устройства может быть снабжена дополнительной камерой, расположенной в корпусе ротора между двумя соседними лопастями. Каждая дополнительная камера имеет свой вытеснительный элемент, выполненный в виде подпружиненного поршня 17.
Работа этого дозатора аналогична. Однако при дозировании жидких веществ свободный объем камер отсутствует и они заполняются полностью. Если плотность жидкости уменьшается, то уменьшается и весовое количество жидкости в камерах грузоприемного уст- ройства. Поэтому весовая система поворачивается по часовой стрелке. Но в этом случае расход жидкости (а значит, и давление) увеличивается. Жидкость давит на поршни 17 сильнее и, сжимая пружины, перемещает их к центру ротора, увеличивает таким образом рабочий объем камер грузоприемного устройства, а значит, и весовое количество жидкости в них. Если плотность жидкости увеличивается, то увеличивается и весовое количество жидкости в камерах грузоприемного устройства. Поэтому весовая система наклоняется (в сторону грузоприемного устройства, а в этом случае, проходное сечение), а значит, расход и давление потока iCi-тдкости уменьшаются. Поршни 17 под действием пружин перемещаются от центра ротора, уменьшая таким образом общий рабочий объем камер и весовое количество жидкости в камерах.
FT ча камеры с жидкостью оказыва - я в нчжней части грузоприемного /..тройства, т.е. возле выпускного канала корпуса грузоприемного устройства, давление в камерах уменьшается, потому что камеры соединяются с трубопроводом 3. Под действием пружин поршни 17 вытесняют жидкость из дополнительных камер, а лопасти, перемещаясь в радиальных пазах ротора, вытесняют жидкость из основных камер.
Обязательным условием работоспособности этого дозатора является способность пружин преодолевать давление жидкости в выходной магистрали - тру- бопроводе 3.
0 5 0 5 о
,
0
5
Воздух, находящийся под каждым поршнем, где установлены пружины, помогает действию пружин. С целью отвода утечек из этой области камеры под каждым поршнем могут быть соединены с каким либо источником низкого давления. Поршни 17 могут быть заменены мембранами, которые приводились бы в действие пружинами или сжатым воздухом. В этом случае отсутствует необходимость отвода воздуха. Так как в случае применения дополнительных камер с дополнительными вытеснительны- ми элементами камеры заполняются полностью жидкостью, то нет необходимости применять воздушный каапан и привод ротора.
Краны весового дозатора (фиг.1 и 2) с радиальными и осевыми каналами являются устройством для подачи, регулирования расхода и отвода дозируемых веществ, а также - вращательной парой рычажной системы.
Канал 18 (фиг. 3) оси выполнен таким образом, что при повороте втулки в любую сторону проходное сечение по тока вещества не меняется (как канал 14, фиг. 1), т.е. расход вещества не регулируется. Привод ротора имеет электродвигатель 19, редуктор 20 с раздаточным реверсом и вал 21. Контргруз 22 соединен с гайкой, установленной на винте 23, который соединен с реверсом редуктора 20. Гайка винта 23 соединена тягой 24 с подвижным роликом 25, который прижат к фрикционным колесам 26 и 27. Колесо 26 насажено неподвижной на вал 21, а колесо 27 установлено на валу счетчика 28.
Реверс управляется двумя электромагнитами, катушки П1 и П. которых включаются в . гпи источника Тока Е с помощью контактов К, и К (при отклонении рычажной системы от положения равновесия).
При включении электродвигателя 19 ротор с лопастями начинает вращаться. Частота вращения ротора и расход вещества, поступающего через канал 18, подобраны таким образом, что камеры заполняются веществом полностью.
Число оборотов вала ротора фиксируется счетчиком 28, который приводится в действие через фрикционные колеса 26 и 27.
Если плотность вещества увеличивается, то весовая система наклоняется в сторону грузоприемного устройст9ir
ва, контакт К( замыкается и через катушку П проходит электрический ток. Электромагнит включает обратный ход винта 23. Так как винт вращается, то гайка, установленная на винте, вместе с контргрузом 22, тягой 24 и роликом 25 перемещается вправо до тех пор, пока весовая система не уравновесится. Когда достигается уравновешивание весовой системы, контакт К размыкается, ток через катушку П, не проходит и винт 23 выводится из зацепления, например, пружиной. Так как ролик 25 перемещается вправо, т.е. ближе к центру колеса 27, а окружная скорость ролика постоянна, то колесо 27 вращается быстрее, поскольку уменьшается длина окружности, по которой катится ролик 25, что приво- дит к увеличению скорости счета счетчиком 28, т.е. увеличение плотности вещества приводит к увеличению весового количеств.а этого вещества в камерах грузоприемного устройства, в результате этого весовая система отклоняется и автоматическая система скорректировала процесс счета.
Когда плотность вещества уменьшается, уменьшается и весовое количест- во вещества в камерах грузоприемного устройства. Весовая система наклоняется в сторону контргруза 22 и замыкает контакт K,j. Через катушку П2 проходит электрический ток и электро- магнит включает прямой ход винта 23.
Гайка винта вместе с контргрузом 22, тягой 24 и роликом 25 перемещаются влево. Так как ролик 25 удаляется от центра колеса 27, то частота его вращения и скорость счета уменьшаются пропорционально изменению весового количества вещества в камерах грузоприемного устройства.
Если ротор вращается под действи- ем разности давления вещества на входе и выходе из корпуса грузоприемного устройства, то электродвигатель 19 не применяется. Так как весовое количество вещества, дозируемого за on- ределенный промежуток времени, зависит только от плотности вещества и от общего числа оборотов ротора, то исключение электродвигателя из конструкции дозатора не требует стабили- зации частоты вращения ротора. Это объясняется тем, что при изменении частоты вращения ротора изменяется и скорость счета, так как ротор и
Ю
счетчик соединены между собой передаточным механизмом.
Дозирование газообразных веществ осуществляется аналогично дозированию жидких веществ.
В весовом дозаторе (фиг. 4) счетное устройство упрощено и содержит подвижный сердечник 29, магнитопровод 30 с обмоткой, счетчик С, источник постоянного тока Е и включатель К.
При нормальной плотности частота вращения ротора грузоприемного устройства и скорость счета счетчика С равны. При увеличении плотности вещества весовая система наклоняется в сторону грузоприемного устройства, а подвижный сердечник 29 приближается к магнитопроводу 30 и таким образом уменьшается воздушный зазор в маг нитопроводе. Это приводит к увеличению тока в цепи обмотки и счетчика С, а значит, и к увеличению скорости счета пропорционально углу наклона весовой системы, т.е. пропорДиональ- но весовому количеству вещества в камерах грузоприемного устройства.
При уменьшении плотности вещества весовая система наклоняется в сторону контргруза, подвижный сердечник удаляется от магнитопровода, воздушный зазор увеличивается, а ток в цепи счетчика С уменьшается, что приводит к уменьшению скорости счета пропорционально уменьшению плотности вещества. Дозирование газообразных веществ осуществляется аналогично дозированию жидких веществ.
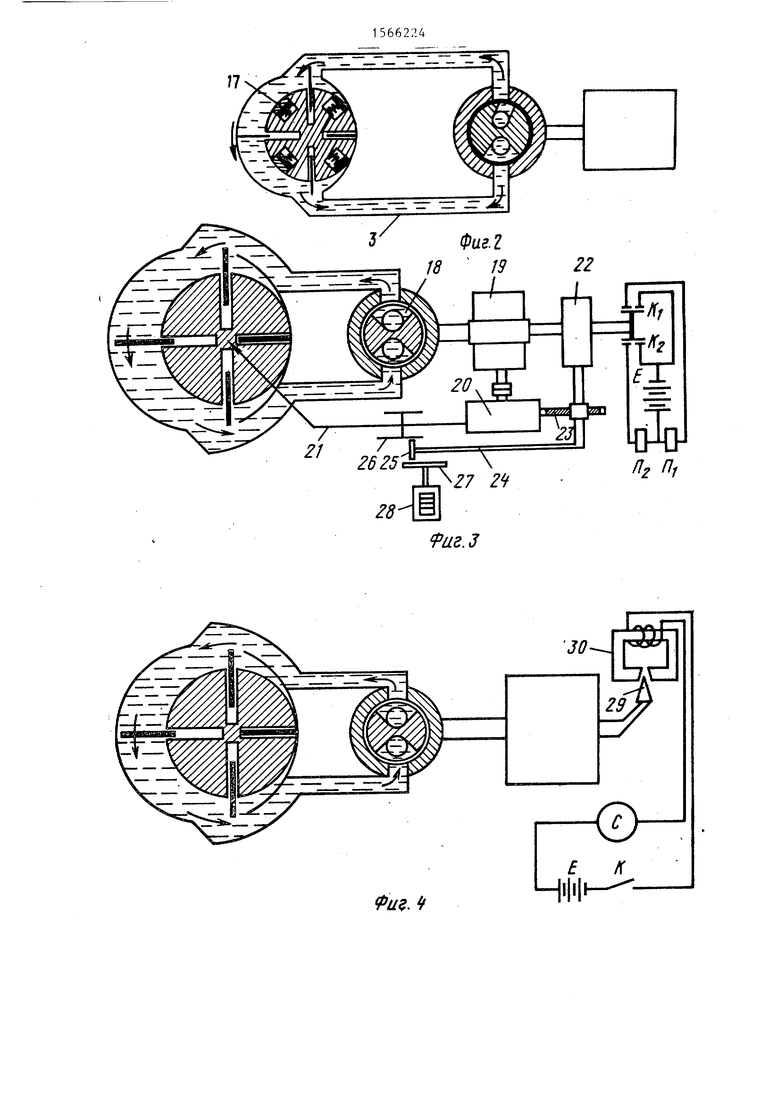
Дозатор (фиг. 5) имеет грузоподъемное устройство, смонтированное на коромысле 31, контргруз 3, призму 33, неподвижные питающий 34 и отводящий 35 трубопроводы, сильфоны 36 и 37, кольцевую заслонку 38 и круглую отражательную пластинку 39.
Заслонка 38 установлена в горизонтальных направляющих входного патрубка корпуса грузоприемного устройства. Круглая отражательная пластинка 39 установлена в конце питающего трубопровода 34 неподвижно.
Сильфоны 36 и 37 позволяют осуществлять закрытый подвод и отвод дозируемых веществ. При изменении плотности вещества грузоприемное устройство вместе с заслонкой 38 опускают-, ся или поднимаются, уменьшая или увеличивая таким образом расход (давление) вещества. Работа грузоприемного
11
устройства рассмотрена выше. При снятии заслонки 38 весовой дозатор работает аналогично.
Всасывающий патрубок 40 (фиг.6) погружен в питающем резервуаре 41,. уровень жидкости в котором поддерживается постоянным. Отводящий патрубок 42 установлен над резервуаром 43. Ротор грузоприемного устройства снабжен электроприводом.
При включении ротора жидкость всасывается через патрубок 40 и полностью заполняет камеры грузоприемного устройства. Когда камеры проходят мимо отводящего патрубка 42, жидкость отводится в резервуар 43. Из последнего жидкость самотеком отводится на потребление. В качестве счетного устройства применяется устройство, показанное на фиг. 3 и 4.
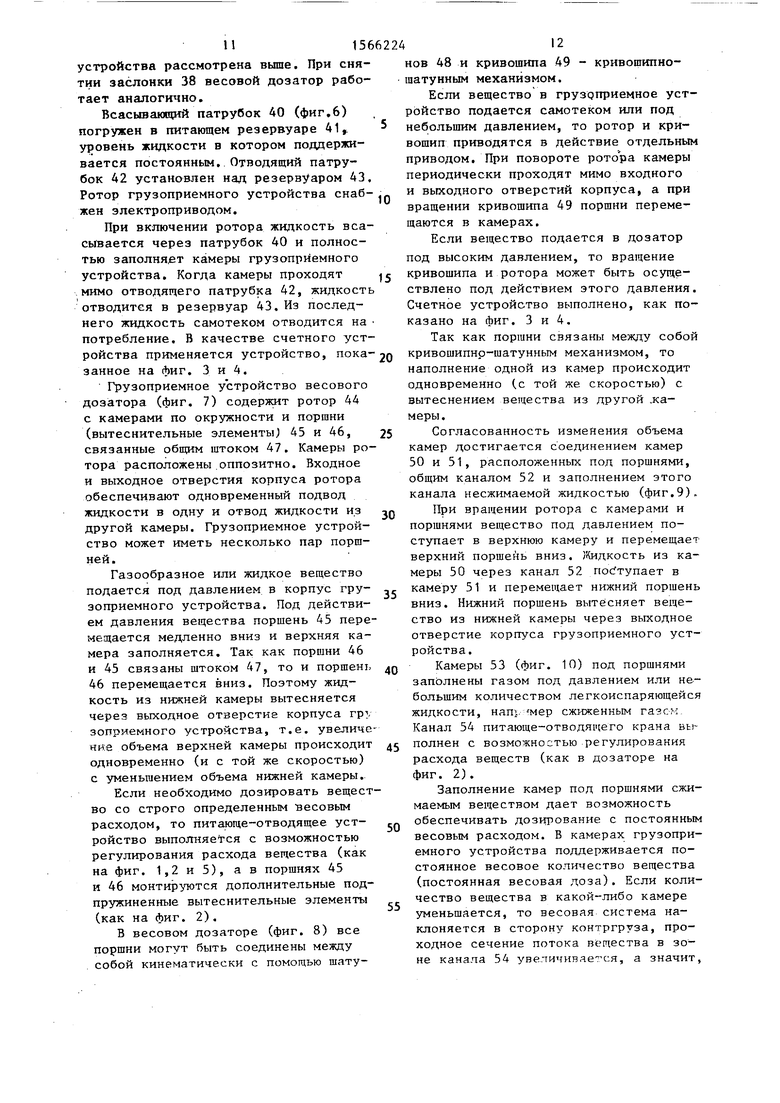
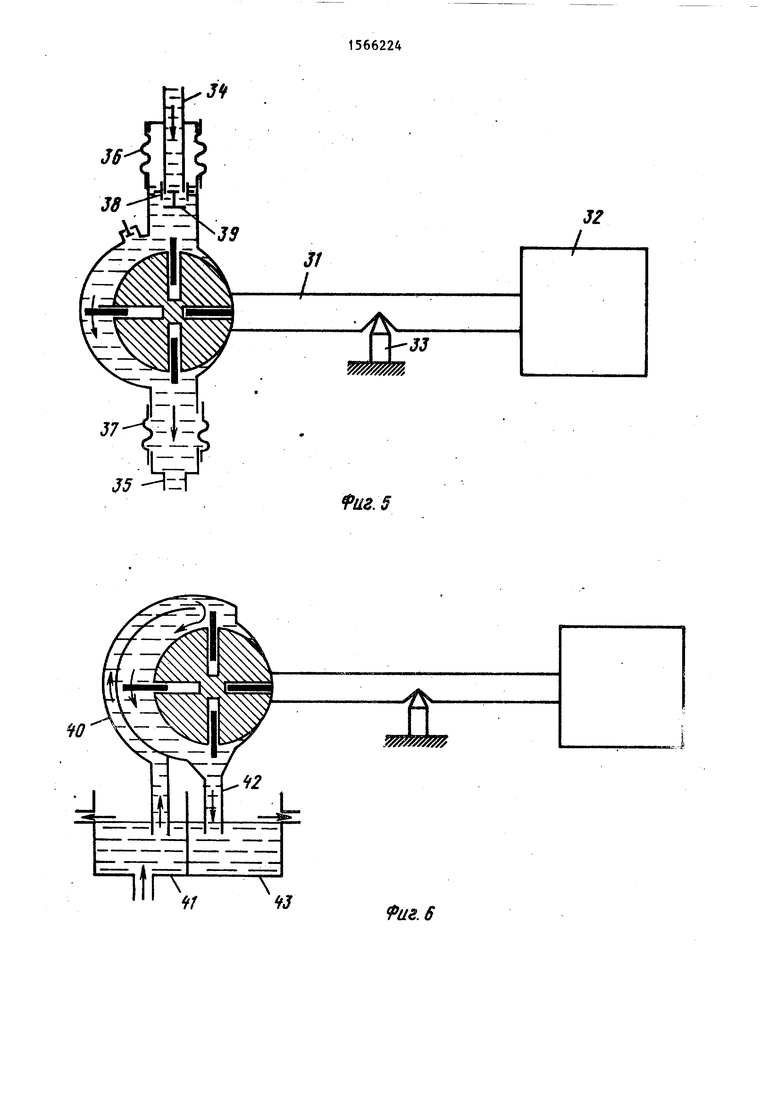
Грузоприемное устройство весового дозатора (фиг. 7) содержит ротор 44 с камерами по окружности и поршни (вытеснительные элементы) 45 и 46, связанные общим штоком 47. Камеры ротора расположены оппозитно. Входное и выходное отверстия корпуса ротора обеспечивают одновременный подвод
ЖИДКОСТИ В ОДНУ И ОТВОД ЖИДКОСТИ ИЗ
другой камеры. Грузоприемное устройство может иметь несколько пар поршней.
Газообразное или жидкое вещество
156
подается под давлением в корпус груэоприемного устройства. Под действием давления вещества поршень 45 перемещается медленно вниз и верхняя камера заполняется. Так как поршни 46 и 45 связаны штоком 47, то и поршень 46 перемещается вниз. Поэтому жидкость из нижней камеры вытесняется через выходное отверстие корпуса гр зоприемного устройства, т.е. увеличение объема верхней камеры происходит одновременно (и с той же скоростью) с уменьшением объема нижней камеры.
Если необходимо дозировать вещество со строго определенным весовым расходом, то питающе-отводящее уст- ройство выполняется с возможностью регулирования расхода вещества (как на фиг. 1,2 и 5), а в поршнях 45 и 46 монтируются дополнительные подпружиненные вытеснительные элементы (как на фиг. 2).
В весовом дозаторе (фиг. 8) все поршни могут быть соединены между собой кинематически с помощью шату
10
jn
25
jQ
40 45
.
622412
нов 48 и кривошипа 49 - кривошипно- шатунным механизмом.
Если вещество в грузрприемное устройство подается самотеком или под небольшим давлением, то ротор и кривошип приводятся в действие отдельным приводом. При повороте рото ра камеры периодически проходят мимо входного и выходного отверстий корпуса, а при вращении кривошипа 49 поршни перемещаются в камерах.
Если вещество подается в дозатор
под высоким давлением, то вращение кривошипа и ротора может быть осуществлено под действием этого давления. Счетное устройство выполнено, как показано на фиг. 3 и 4.
Так как поршни связаны между собой кривошипнр-шатунным механизмом, то наполнение одной из камер происходит одновременно (с той же скоростью) с вытеснением вещества из другой .камеры.
Согласованность изменения объема камер достигается соединением камер 50 и 51, расположенных под поршнями, общим каналом 52 и заполнением этого канала несжимаемой жидкостью (фиг.9).
При вращении ротора с камерами и поршнями вещество под давлением поступает в верхнюю камеру и перемещает верхний поршень вниз. Жидкость из камеры 50 через канал 52 поступает в камеру 51 и перемещает нижний поршень вниз. Нижний поршень вытесняет вещество из нижней камеры через выходное отверстие корпуса грузоприемного устройства.
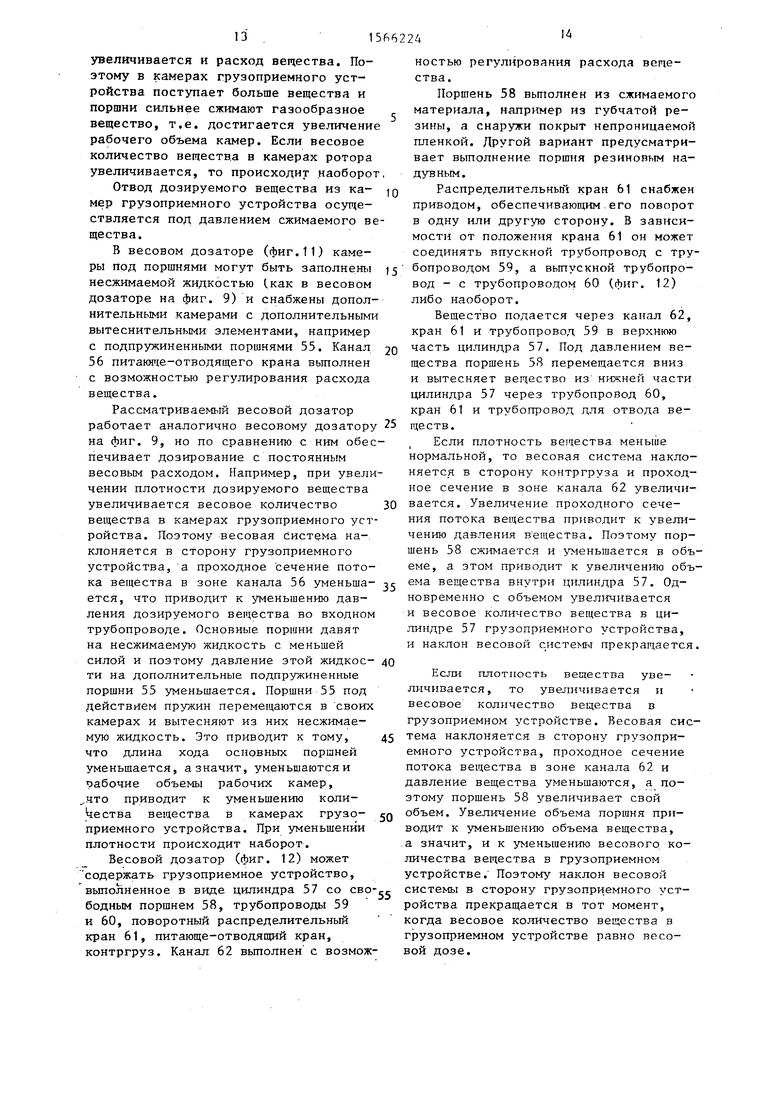
Камеры 53 (фиг. 10) под поршнями заполнены газом под давлением или небольшим количеством легкоиспаряющейся жидкости, нащ мер сжиженным газо: Канал 54 питающе-отводящего крана выполнен с возможностью регулирования расхода веществ (как в дозаторе на фиг. 2).
Заполнение камер под поршнями сжимаемым веществом дает возможность обеспечивать дозирование с постоянным весовым расходом. В камерах грузоприемного устройства поддерживается постоянное весовое количество вещества (постоянная весовая доза). Если количество вещества в какой-либо камере уменьшается, то весовая система наклоняется в сторону контргруза, проходное сечение потока вещества в зоне канала 54 уветичивае ся, а значит,
35
увеличивается и расход вещества. Поэтому в камерах грузоприемного устройства поступает больше вещества и поршни сильнее сжимают газообразное вещество, т.е. достигается увеличение рабочего объема камер. Если весовое количество вещества в камерах ротора увеличивается, то происходит наоборот
Отвод дозируемого вещества из ка- мер грузоприемного устройства осуществляется под давлением сжимаемого вещества.
В весовом дозаторе (фиг.11) камеры под поршнями могут быть заполнены несжимаемой жидкостью (.как в весовом дозаторе на фиг. 9) и снабжены дополнительными камерами с дополнительными вытеснительными элементами, например с подпружиненными поршнями 55. Канал 56 питающе-отводящего крана выполнен с возможностью регулирования расхода вещества.
Рассматриваемый весовой дозатор работает аналогично весовому дозатору на фиг. 9, но по сравнению с ним обеспечивает дозирование с постоянным весовым расходом. Например, при увеличении плотности дозируемого вещества увеличивается весовое количество вещества в камерах грузоприемного устройства. Поэтому весовая система наклоняется в сторону грузоприемного устройства, а проходное сечение потока вещества в зоне канала 56 уменьша- ется, что приводит к уменьшению давления дозируемого вещества во входном трубопроводе. Основные поршни давят на несжимаемую жидкость с меньшей силой и поэтому давление этой жидкое- ти на дополнительные подпружиненные поршни 55 уменьшается. Поршни 55 под действием пружин перемещаются в своих камерах и вытесняют из них несжимаемую жидкость. Это приводит к тому, что длина хода основных поршней уменьшается, а значит, уменьшаются и рабочие объемы рабочих камер, что приводит к уменьшению количества вещества в камерах грузо- приемного устройства. При уменьшении плотности происходит наборот.
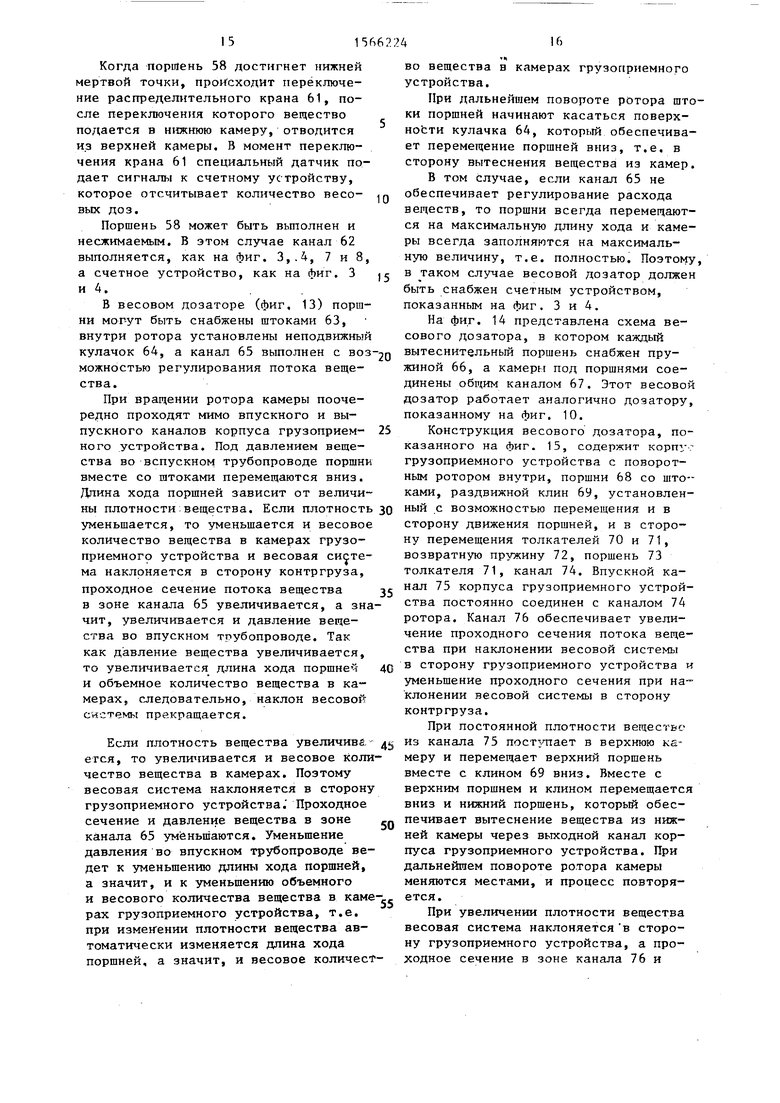
Весовой дозатор (фиг. 12) может содержать грузоприемное устройство, выполненное в виде цилиндра 57 со свободным поршнем 58, трубопроводы 59 и 60, поворотный распределительный кран 61, питающе-отводящий кран, контргруз. Канал 62 выполнен с возможностью регулирования расхода вещества.
Поршень 58 выполнен из сжимаемого материала, например из губчатой резины, а снаружи покрыт непроницаемой пленкой. Другой вариант предусматривает выполнение поршня резиновым надув ным.
Распределительный кран 61 снабжен приводом, обеспечивающим его поворот в одну или другую сторону. В зависимости от положения крана 61 он может соединять впускной трубопровод с трубопроводом 59, а выпускной трубопровод - с трубопроводом 60 (фиг. 12) либо наоборот.
Вещество подается через канал 62, кран 61 и трубопровод 59 в верхнюю часть цилиндра 57. Под давлением вещества поршень 58 перемещается вниз и вытесняет вещество из нижней части цилиндра 57 через трубопровод 60, кран 61 и трубопровод для отвода веществ.
Если плотность вещества меньше нормальной, то весовая система наклоняется в сторону контргруза и проходное сечение в зоне канала 62 увеличивается. Увеличение проходного сечения потока вещества приводит к увеличению давления вещества. Поэтому поршень 58 сжимается и уменьшается в объеме, а этом приводит к увеличению объема вещества внутри цилиндра 57. Одновременно с объемом увеличивается и весовое количество вещества в цилиндре 57 грузоприемного устройства, и наклон весовой системы прекращается
Если плотность вещества увеличивается, то увеличивается и весовое количество вещества в грузоприемном устройстве. Весовая система наклоняется в сторону грузопри- емкого устройства, проходное сечение потока вещества в зоне канала 62 и давление вещества уменьшаются, а поэтому поршень 58 увеличивает свой объем. Увеличение объема поршня приводит к уменьшению объема вещества, а значит, и к уменьшению весового количества вещества в грузоприемном устройстве. Поэтому наклон весовой системы в сторону грузоприемного устройства прекращается в тот момент, когда весовое количество вещества в грузоприемном устройстве равно весовой дозе.
Когда поршень 58 достигнет нижней мертвой точки, происходит переключение распределительного крана 61, после переключения которого вещество подается в нижнюю камеру, отводится из верхней камеры. В момент переключения крана 61 специальный датчик подает сигналы к счетному устройству, которое отсчитывает количество весовых доз.
Поршень 58 может быть выполнен и несжимаемым. В этом случае канал 62 выполняется, как на фиг. 3,.4, 7 и 8, а счетное устройство, как на фиг. 3 и 4.
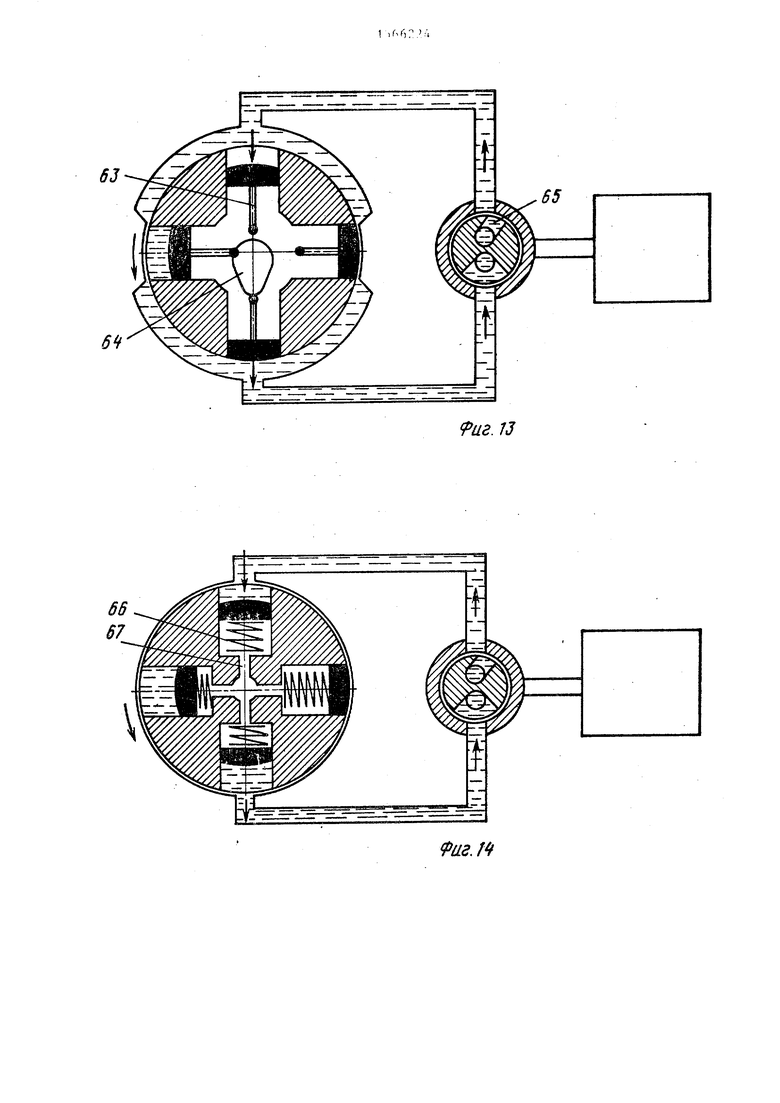
В весовом дозаторе (фиг, 13) поршни могут быть снабжены штоками 63, внутри ротора установлены неподвижный кулачок 64, а канал 65 выполнен с возможностью регулирования потока вещества.
При вращении ротора камеры поочередно проходят мимо впускного и выпускного каналов корпуса грузоприем- ного устройства. Под давлением вещества во вспускном трубопроводе поршни вместе со штоками перемещаются вниз. Длина хода поршней зависит от величины плотности вещества. Если плотность уменьшается, то уменьшается и весовое количество вещества в камерах грузоприемного устройства и весовая система наклоняется в сторону контргруза, проходное сечение потока вещества в зоне канала 65 увеличивается, а значит, увеличивается и давление вещества во впускном трубопроводе. Так как давление вещества увеличивается, то увеличивается длина хода поршнеч и объемное количество вещества в камерах, следовательно, наклон весовой системы прекращается.
Если плотность вещества увеличивг егся, то увеличивается и весовое количество вещества в камерах. Поэтому весовая система наклоняется в сторону грузоприемного устройства. Проходное сечение и давление вещества в зоне канала 65 уменьшаются. Уменьшение давления во впускном трубопроводе ведет к уменьшению длины хода поршней, а значит, и к уменьшению объемного
и весового количества вещества в камерах грузоприемного устройства, т.е. при изменении плотности вещества автоматически изменяется длина хода поршней, а значит, и весовое количест5
0
5
3035 40
д 50
55
во вещества в камерах грузоприемного устройства.
При дальнейшем повороте ротора штоки поршней начинают касаться поверхности кулачка 64, который обеспечивает перемещение поршней вниз, т.е. в сторону вытеснения вещества из камер.
В том случае, если канал 65 не обеспечивает регулирование расхода веществ, то поршни всегда перемещаются на максимальную длину хода и камеры всегда заполняются на максимальную величину, т.е. полностью. Поэтому, в jraKOM случае весовой дозатор должен быть снабжен счетным устройством, показанным на фиг. 3 и 4.
На фиг. 14 представлена схема весового дозатора, в котором каждый вытесните.льный поршень снабжен пружиной 66, а камеры под поршнями соединены общим каналом 67. Этот весовой дозатор работает аналогично дозатору, показанному на фиг. 10.
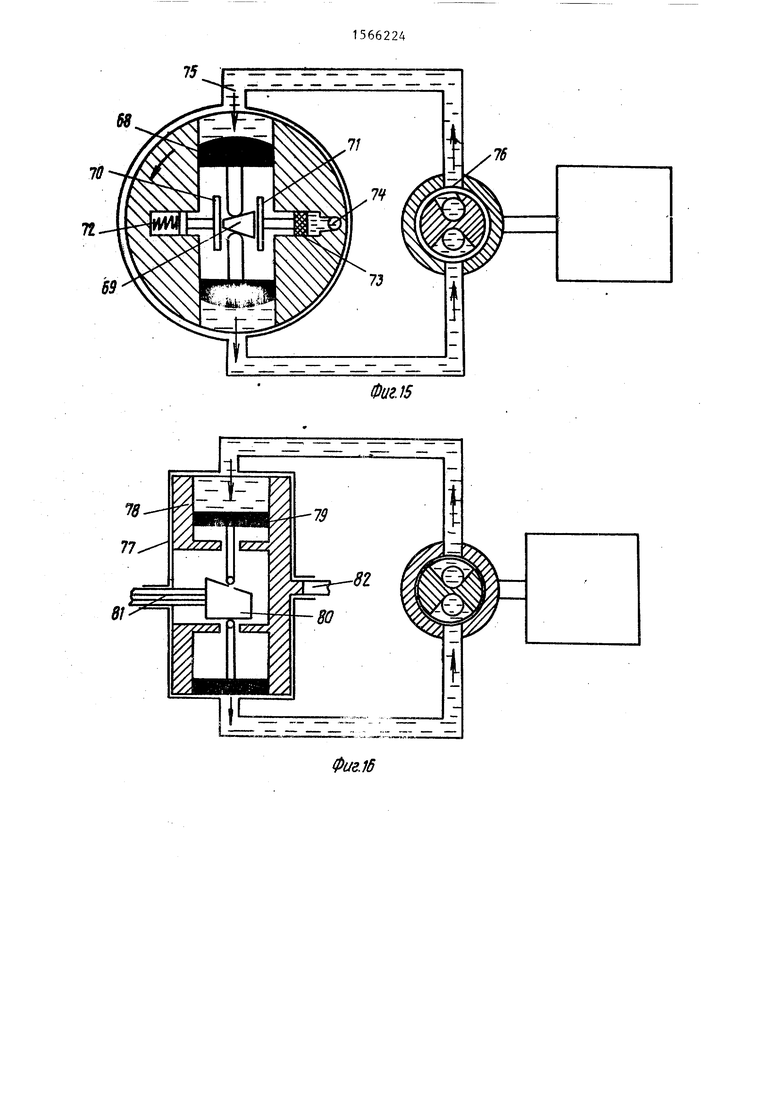
Конструкция весового дозатора, показанного на фиг. 15, содержит корпу грузоприемного устройства с поворотным ротором внутри, поршни 68 со штоками, раздвижной клин 69, установленный с возможностью перемещения и в сторону движения поршней, и в сторону перемещения толкателей 70 и 71, возвратную пружину 72, поршень 73 толкателя 71, канал 74. Впускной канал 75 корпуса грузоприемного устройства постоянно соединен с каналом 74 ротора. Канал 76 обеспечивает увеличение проходного сечения потока вещества при наклонении весовой системы в сторону грузоприемного устройства и уменьшение проходного сечения при наклонении весовой системы в сторону контргруза.
При постоянной плотности веществе из канала 75 поступает в верхнюю камеру и перемещает верхний поршень вместе с клином 69 вниз. Вместе с верхним поршнем и клином перемещается вниз и нижний поршень, который обеспечивает вытеснение вещества из нижней камеры через выходной канал корпуса грузоприемного устройства. При дальнейшем повороте ротора камеры меняются местами, и процесс повторяется.
При увеличении плотности вещества весовая система наклоняется в сторону грузоприемного устройства, а проходное сечение в зоне канала 76 и
Ь15
давление в каналах 75 и 74 увеличиваются. Поэтому поршень 73, а вместе с ним толкатель 71 и клин 69 перемещается к центру ротора. Клин 69 раздвигает между собой поршни 68, умень- шая таким образом длину хода поршней,
а значит, и объем вещества в камерах. При уменьшении плотности вещества весовая система наклоняется в сторону контргруза, проходное сечение в зоне канала 76 и давление в ка- наЛах 75 и 74 уменьшаются. Поэтому под действием пружины 72 толкатели 70
18
но мимо впускного и выпускного канл- лов корпуса 83.
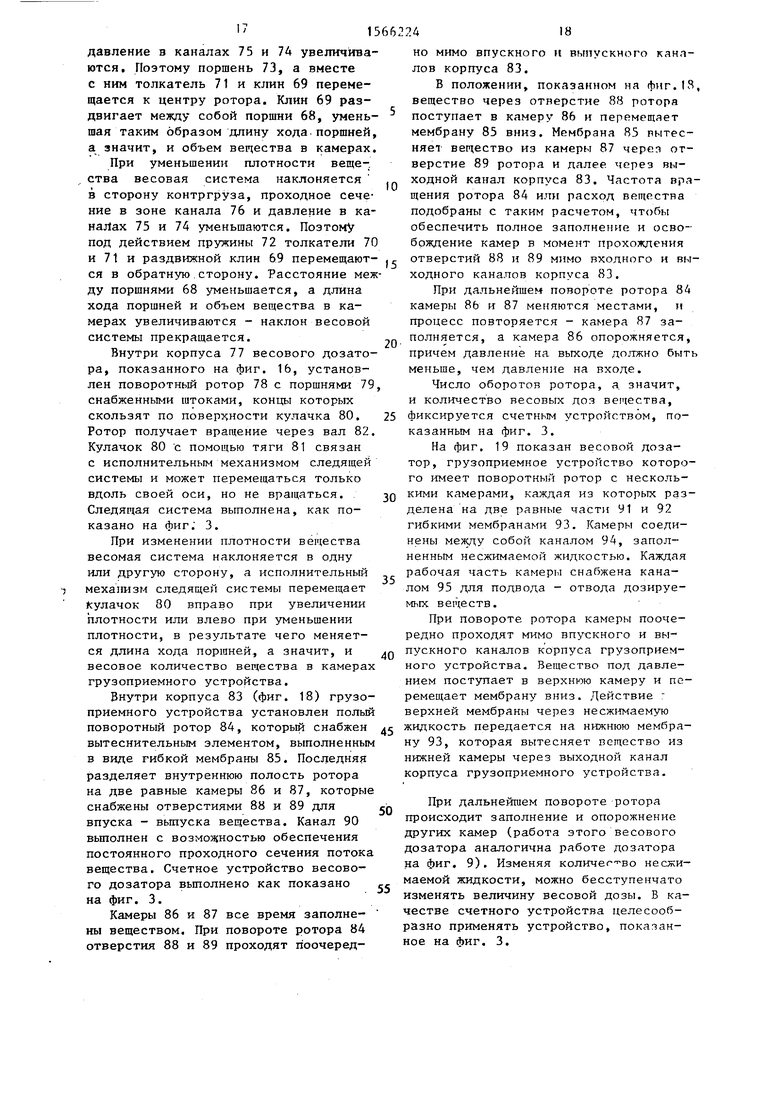
В положении, показанном на фиг.13, вещество через отверстие 88 ротора поступает в камеру 86 и перемещает мембрану 85 вниз. Мембрана 85 пытес- няет вещество из камеры 87 черея отверстие 89 ротора и далее через выходной канал корпуса 83. Частота вращения ротора 84 ипн расход вещества подобраны с таким расчетом, чтобы обеспечить полное заполнение и освобождение камер в момент прохождения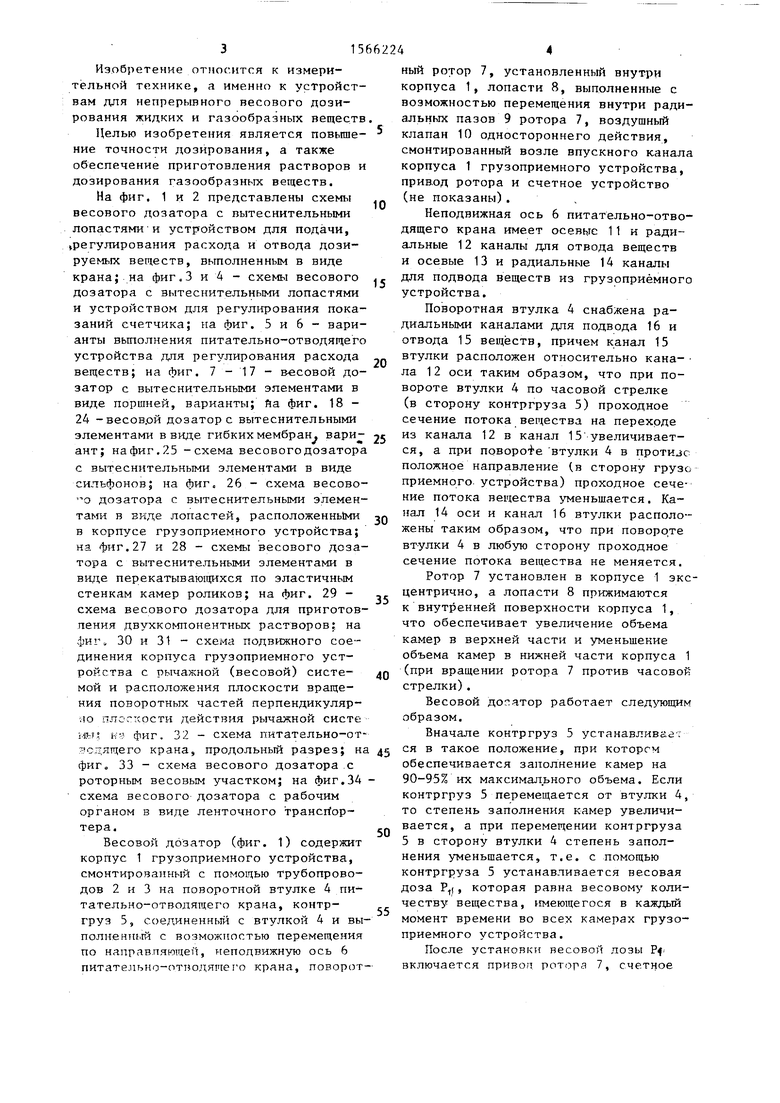
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЪЕМНЫЙ ДОЗАТОР ЖИДКОСТИ | 2004 |
|
RU2271520C1 |
| Дозатор жидких сред | 1988 |
|
SU1640552A1 |
| ОБЪЕМНЫЙ ДОЗАТОР ЖИДКОСТИ С ВЕСОВЫМ КОНТРОЛЕМ | 2007 |
|
RU2348014C1 |
| Дозатор жидких,пастообразных и газообразных веществ | 1980 |
|
SU956988A1 |
| НАСОС-ДОЗАТОР | 2013 |
|
RU2527001C1 |
| Дозатор для однолинейной системы смазки | 1976 |
|
SU662778A1 |
| Устройство для дозирования жидкости | 1988 |
|
SU1664121A3 |
| Импульсный дозатор жидкости | 1990 |
|
SU1760337A1 |
| СПОСОБ ОБЪЕМНОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2503932C2 |
| ГИДРОПНЕВМОМОТОР | 2011 |
|
RU2451835C1 |

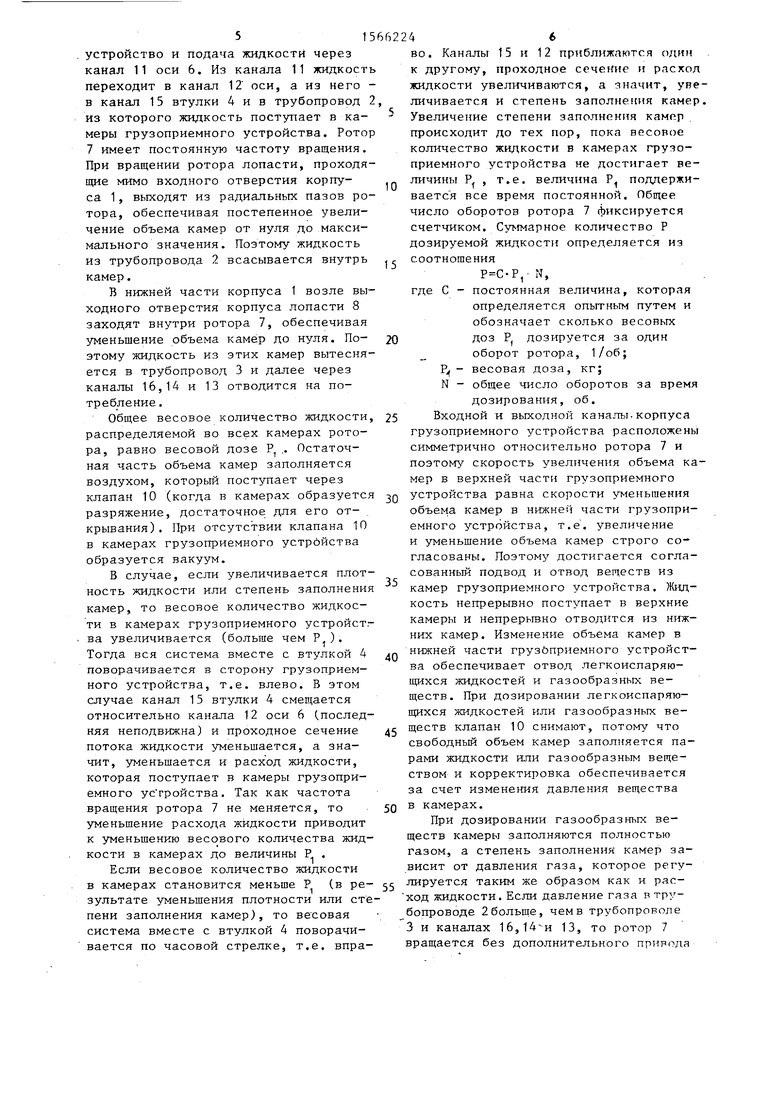
Изобретение относится к измерительной технике, а именно к устройствам для непрерывного весового дозирования жидких и газообразных веществ. Целью изобретения является повышение точности дозирования, а также обеспечение приготовления растворов и дозирования газообразных веществ. Весовой дозатор содержит корпус 1 грузоприемного устройства, смонтированный с помощью трубопроводов 2 и 3 на поворотной втулке 4 питательно-отводящего крана, контргруз 5, соединенный с втулкой 4 и выполненный с возможностью перемещения по направляющей, неподвижную ось 5 питательно-отводящего крана, поворотный ротор 7, установленный внутри корпуса 1, лопасти 8, выполненные с возможностью перемещения внутри радиальных пазов 9 ротора 7, воздушный клапан 10 одностороннего действия, смонтированный возле впускного канала корпуса 1 грузоприемного устройства, привод ротора и счетное уо. Неподвижная ось 6 питательно-отводящего крана имеет осевые 11 и радиальные 12 каналы для отвода веществ из грузоприемного устройства. 34 ил.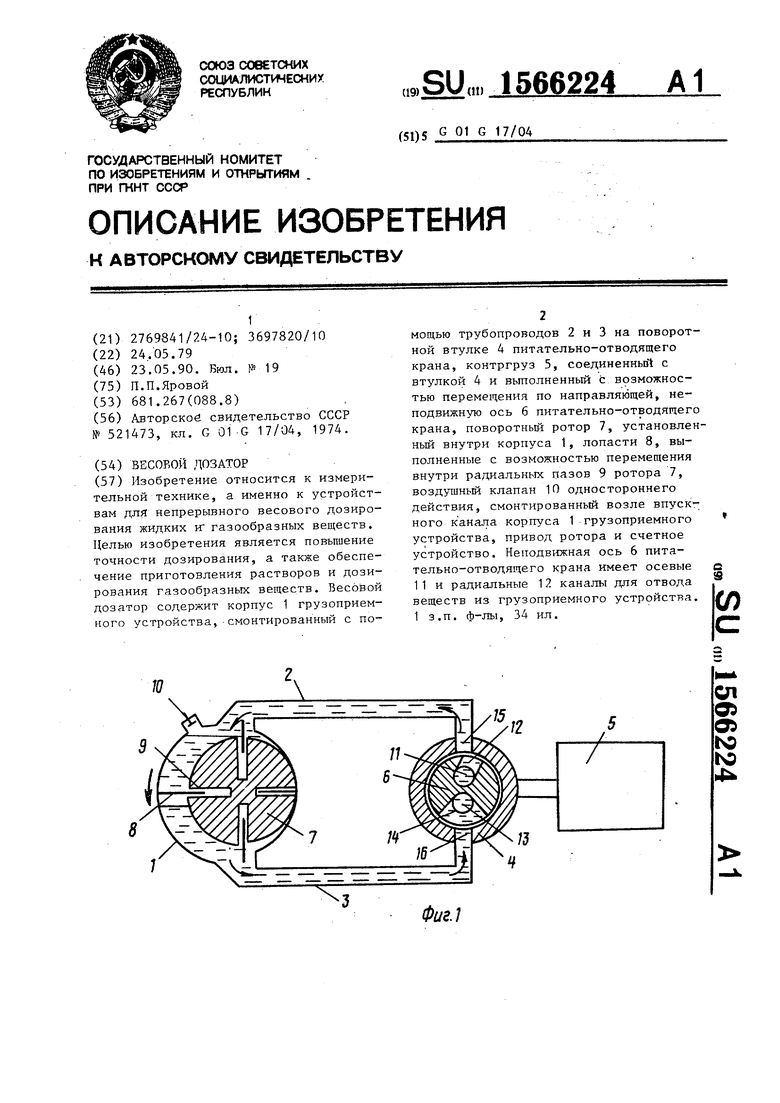
и 71 и раздвижной клин 69 перемещают- . - отверстий 88 и 89 мимо входного и вы20
25
30
35
ся в обратную сторону. Расстояние меж ду поршнями 68 уменьшается, а длина хода поршней и объем вещества в камерах увеличиваются - наклон весовой системы прекращается.
Внутри корпуса 77 весового дозатора, показанного на фиг. 16, установлен поворотный ротор 78 с поршнями 79, снабженными штоками, концы которых скользят по поверхности кулачка 80. Ротор получает вращение через вал 82. Кулачок 80 с помощью тяги 81 связан с исполнительным механизмом следящей системы и может перемещаться только вдоль своей оси, но не вращаться. Следящая система выполнена, как показано на фиг. 3.
При изменении плотности вещества весомая система наклоняется в одну или другую сторону, а исполнительный механизм следящей системы перемещает кулачок 80 вправо при увеличении плотности или влево при уменьшении плотности, в результате чего меняется длина хода поршней, а значит, и весовое количество вещества в камерах грузоприемного устройства.
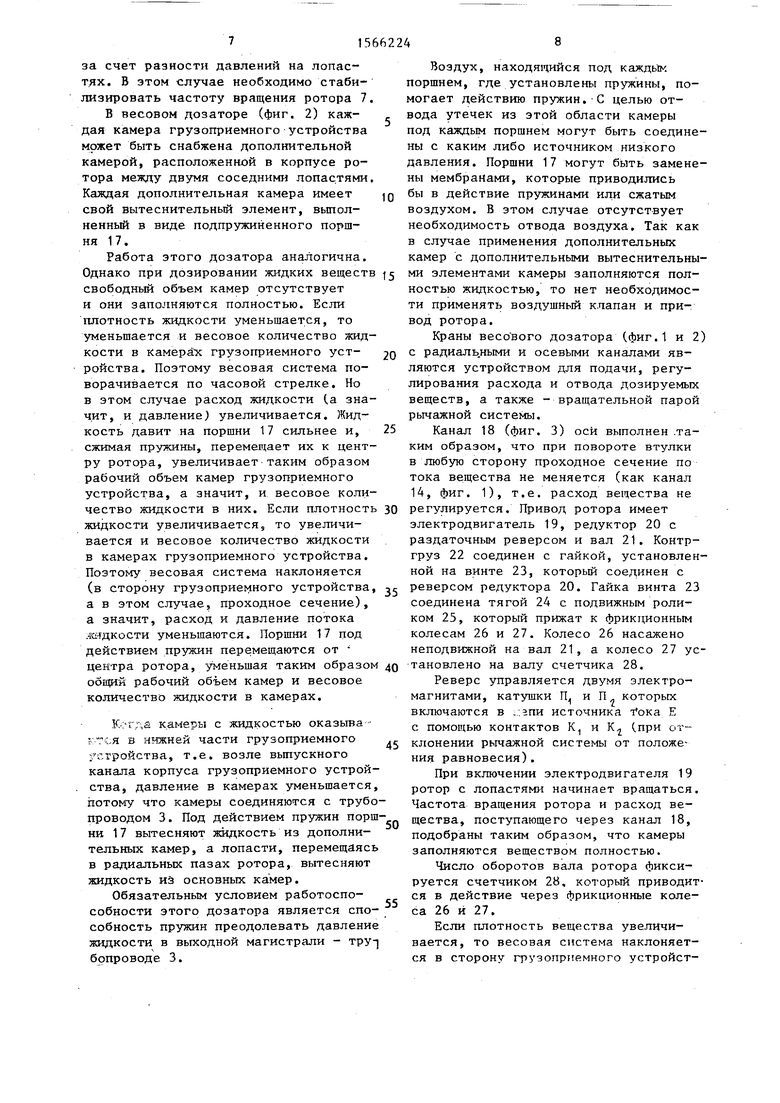
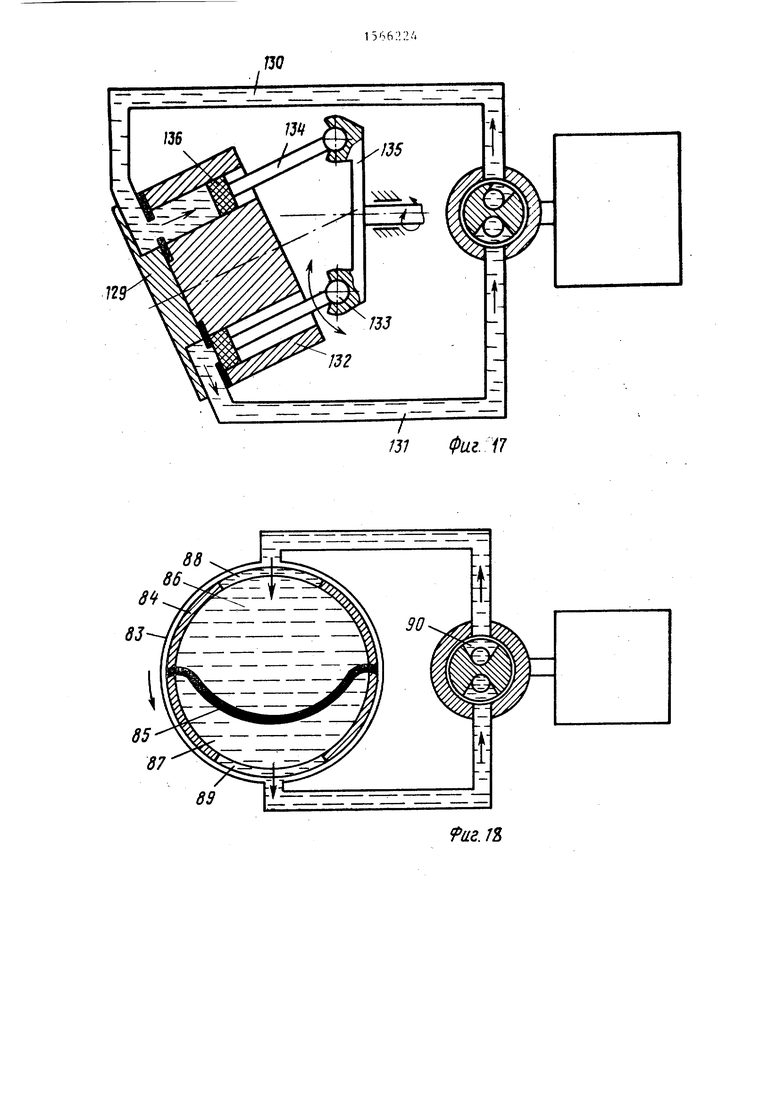
Внутри корпуса 83 (фиг. 18) грузоприемного устройства установлен полый поворотный ротор 84, который снабжен вытеснительным элементом, выполненным в виде гибкой мембраны 85. Последняя разделяет внутреннюю полость ротора на две равные камеры 86 и 87, которые снабжены отверстиями 88 и 89 для JQ впуска - выпуска вещества. Канал 90 выполнен с возможностью обеспечения постоянного проходного сечения потока вещества. Счетное устройство весового дозатора выполнено как показано на фиг. 3.
Камеры 86 и 87 все время заполнены веществом. При повороте ротора 84 отверстия 88 и 89 проходят поочеред40
55
ходного каналов корпуса 83.
При дальнейшем повороте ротора 84 камеры 86 и 87 меняются местами, и процесс повторяется - камера 87 заполняется, а камера 86 опорожняется, причем давление на выходе должно быть меньше, чем давление на входе.
Число оборотов ротора, а значит, и количество весовых доз вещества, фиксируется счетным устройством, показанным на фиг. 3.
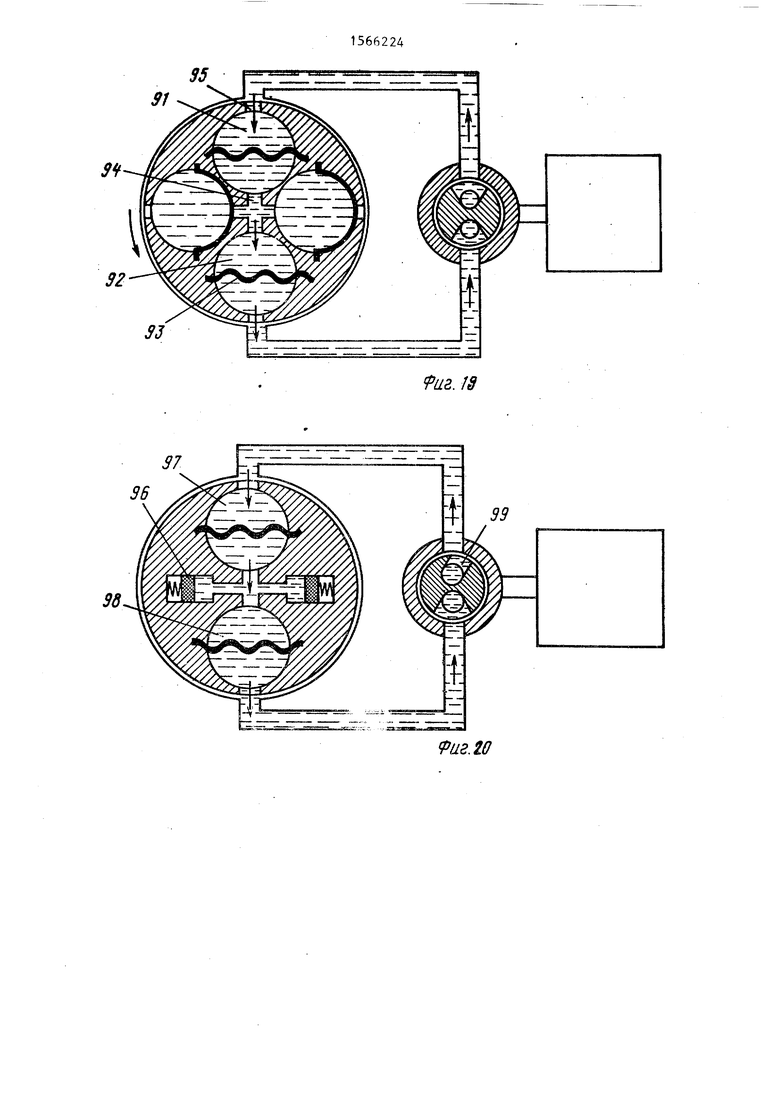
На фиг. 19 показан весовой дозатор, грузоприемное устройство которого имеет поворотный ротор с несколькими камерами, каждая из которых разделена на две равные части У1 и 92 гибкими мембранами 93. Камеры соединены между собой каналом 94, заполненным несжимаемой жидкостью. Каждая рабочая часть камеры снабжена каналом 95 для подвода - отвода дозируемых веществ.
При повороте ротора камеры поочередно проходят мимо впускного и выпускного каналов корпуса грузоприемного устройства. Вещество под давлением поступает в верхнюю камеру и перемещает мембрану вниз. Действие - верхней мембраны через несжимаемую жидкость передается на нижнюю мембрану 93, которая вытесняет вещество из нижней камеры через выходной канал корпуса грузоприемного устройства.
При дальнейшем повороте ротора происходит заполнение и опорожнение других камер (работа этого весового дозатора аналогична работе дозатора на фиг. 9). Изменяя количество несжимаемой жидкости, можно бесступенчато изменять величину весовой дозы. В качестве счетного устройства целесообразно применять устройство, покатанное на фиг. 3.
20
25
0
5
Q
0
5
ходного каналов корпуса 83.
При дальнейшем повороте ротора 84 камеры 86 и 87 меняются местами, и процесс повторяется - камера 87 заполняется, а камера 86 опорожняется, причем давление на выходе должно быть меньше, чем давление на входе.
Число оборотов ротора, а значит, и количество весовых доз вещества, фиксируется счетным устройством, показанным на фиг. 3.
На фиг. 19 показан весовой дозатор, грузоприемное устройство которого имеет поворотный ротор с несколькими камерами, каждая из которых разделена на две равные части У1 и 92 гибкими мембранами 93. Камеры соединены между собой каналом 94, заполненным несжимаемой жидкостью. Каждая рабочая часть камеры снабжена каналом 95 для подвода - отвода дозируемых веществ.
При повороте ротора камеры поочередно проходят мимо впускного и выпускного каналов корпуса грузоприемного устройства. Вещество под давлением поступает в верхнюю камеру и перемещает мембрану вниз. Действие - верхней мембраны через несжимаемую жидкость передается на нижнюю мембрану 93, которая вытесняет вещество из нижней камеры через выходной канал корпуса грузоприемного устройства.
При дальнейшем повороте ротора происходит заполнение и опорожнение других камер (работа этого весового дозатора аналогична работе дозатора на фиг. 9). Изменяя количество несжимаемой жидкости, можно бесступенчато изменять величину весовой дозы. В качестве счетного устройства целесообразно применять устройство, покатанное на фиг. 3.
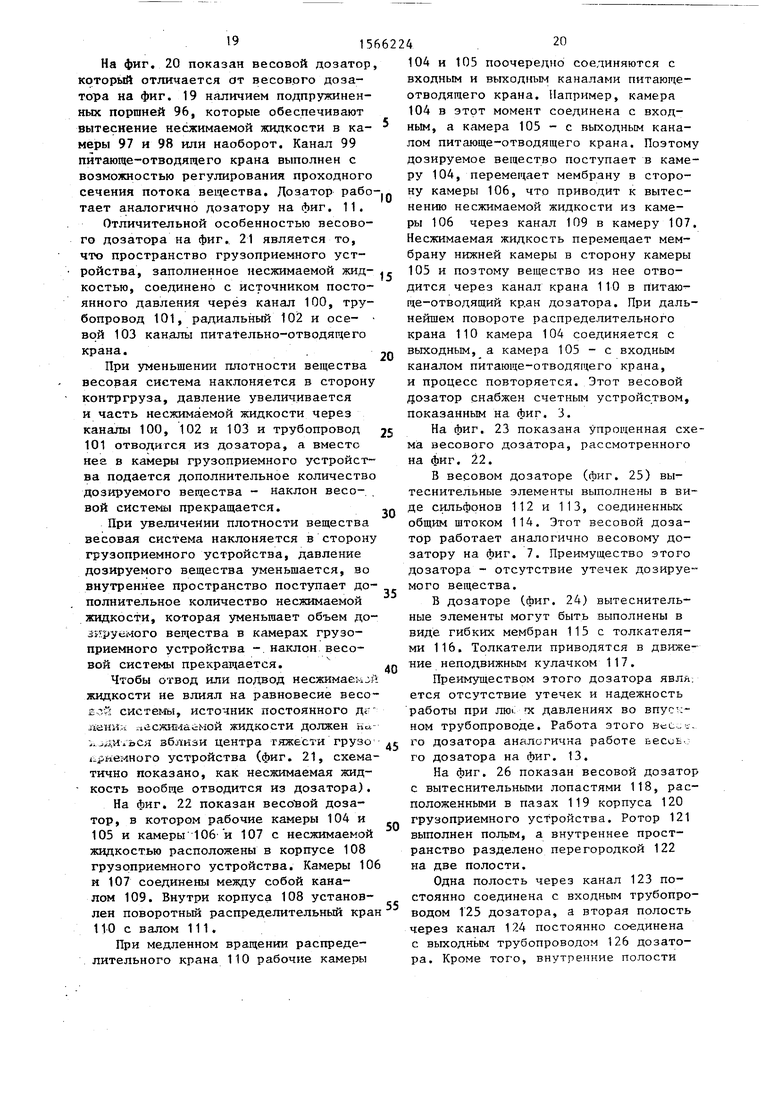
На фиг. 20 показан весовой дозатор, который отличается от весового дозатора на фиг. 19 наличием подпружиненных поршней 96, которые обеспечивают вытеснение несжимаемой жидкости в камеры 97 и 98 или наоборот. Канал 99 питающе-отводящего крана выполнен с возможностью регулирования проходного сечения потока вещества. Дозатор работает аналогично дозатору на фиг. 11.
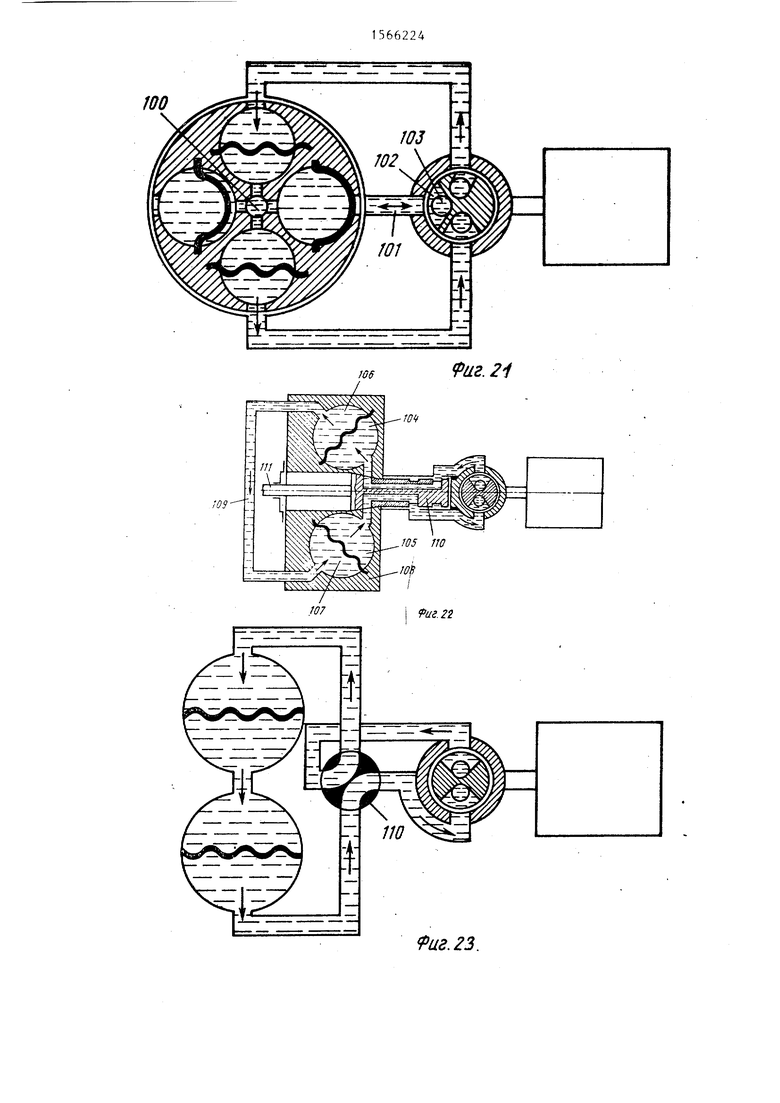
Отличительной особенностью весового дозатора на фиг. 21 является то, что пространство грузоприемного устройства, заполненное несжимаемой жид- ,- 105 и поэтому вещество из нее отво20
30
35
костью, соединено с источником постоянного давления через канал 100, трубопровод 101, радиальный 102 и осе- вой 103 каналы питательно-отводящего крана.
При уменьшении плотности вещества весовая система наклоняется в сторону контргруза, давление увеличивается и часть несжимаемой жидкости через каналы 100, 102 и 103 и трубопровод 25 101 отводится из дозатора, а вместе нег в камеры грузоприемного устройства подается дополнительное количество дозируемого вещества - наклон весо- , вой системы прекращается.
При увеличении плотности вещества весовая система наклоняется в сторону грузоприемного устройства, давление дозируемого вещества уменьшается, во внутреннее пространство поступает дополнительное количество несжимаемой жидкости, которая уменьшает объем дозируемого вещества в камерах грузоприемного устройства - наклон весовой системы прекращается. v п
Чтобы отвод или подвод несжимаемой жидкости не влиял на равновесие весо- г. системы, источник постоянного д. .игни-t -1 схимаомой жидкости должен ь . лилься вблизи центра тяжести грузо приемного устройства (фиг. 21, схематично показано, как несжимаемая жидкость вообще отводится из дозатора). На фиг. 22 показан весомой дозатор, в котором рабочие камеры 104 и 105 и камеры 106 и 107 с несжимаемой жидкостью расположены в корпусе 108 грузоприемного устройства. Камеры 106 и 107 соединены между собой каналом 109. Внутри корпуса 108 установлен поворотный распределительный кран 110 с валом 111.
При медленном вращении распределительного крана 110 рабочие камеры
45
50
55
дится через канал крана 110 в питаю- ще-отводящий кран дозатора. При даль нейшем повороте распределительного крана 110 камера 104 соединяется с выходным, а камера 105 - с входным каналом питающе-отводящего крана, и процесс повторяется. Этот весовой дозатор снабжен счетным устройством, показанным на фиг. 3.
На фиг. 23 показана упрощенная сх ма весового дозатора, рассмотренного на фиг. 22.
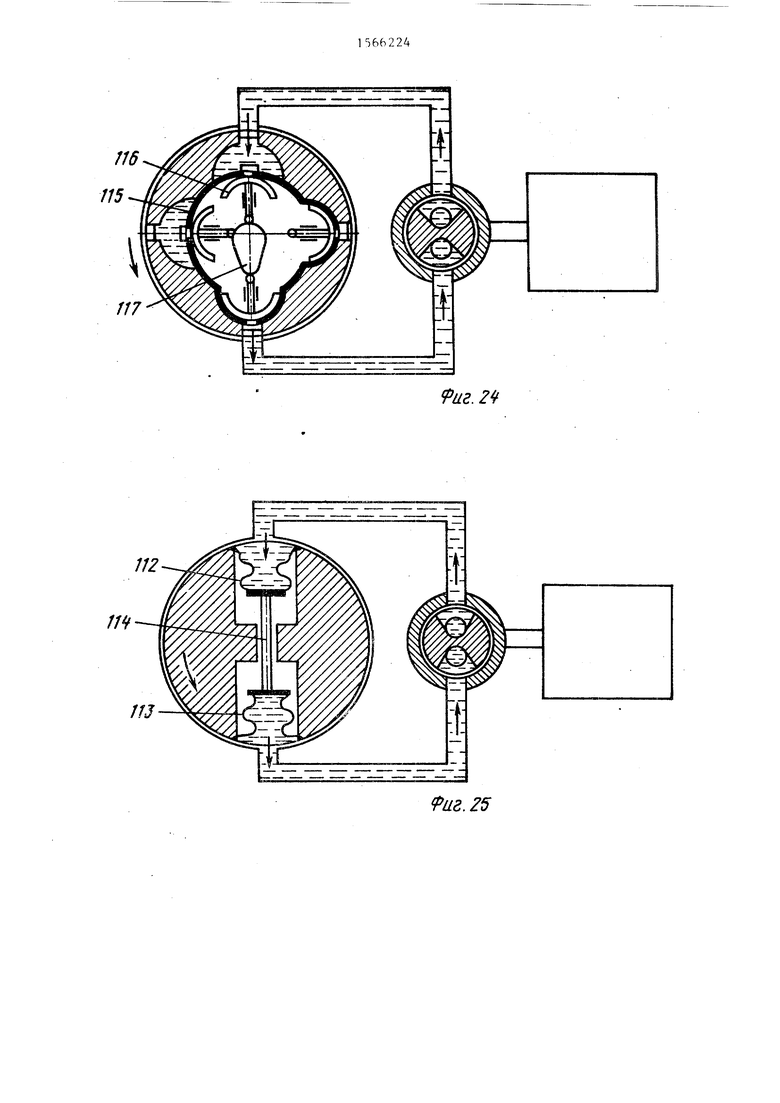
В весовом дозаторе (фиг. 25) вы- теснительные элементы выполнены в ви де сильфонов 112 и 113, соединенных общим штоком 114. Этот весовой дозатор работает аналогично весовому дозатору на фиг. 7. Преимущество этого дозатора - отсутствие утечек дозируе мого вещества.
В дозаторе (фиг. 24) вытеснитель- ные элементы могут быть выполнены в виде гибких мембран 115 с толкателями 116. Толкатели приводятся в движе ние неподвижным кулачком 117.
Преимуществом этого дозатора явля ется отсутствие утечек и надежность работы при лкн х давлениях во впускном трубопроводе. Работа этого вей.. го дозатора аналогична работе несиь. го дозатора на фиг. 13.
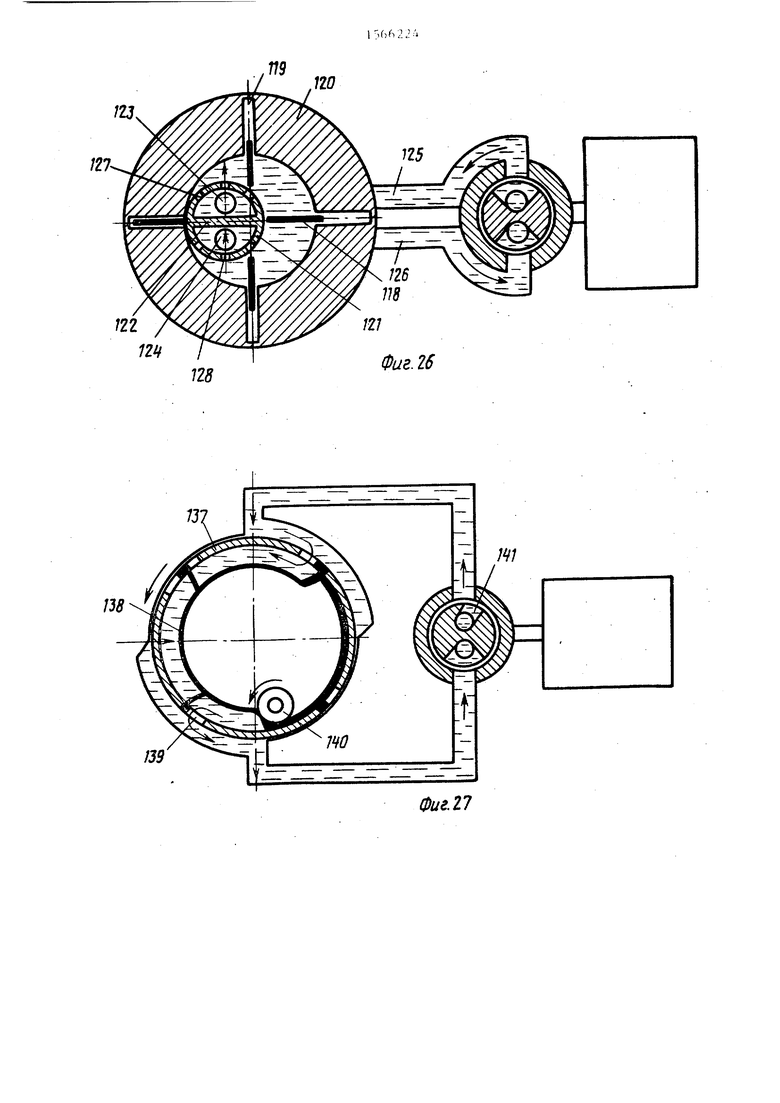
На фиг. 26 показан весовой дозато с вытеснительными лопастями 118, рас положенными в пазах 119 корпуса 120 грузоприемного устройства. Ротор 121 выполнен полым, а внутреннее пространство разделено перегородкой 122 на две полости.
Одна полость через канал 123 постоянно соединена с входным трубопро водом 125 дозатора, а вторая полость через канал 124 постоянно соединена с выходным трубопроводом 126 дозатора. Кроме того, внутренние полости
104 и 105 поочередно соединяются с входным и выходным каналами питакще- отводящего крана. Например, камера 104 в этот момент соединена с входным, а камера 105 - с выходным каналом питающе-отводящего крана. Поэтому дозируемое вещество поступает в камеру 104, перемещает мембрану в сторону камеры 106, что приводит к вытеснению несжимаемой жидкости из камеры 106 через канал 109 в камеру 107. Несжимаемая жидкость перемещает мембрану нижней камеры в сторону камеры
0
30
35
5
п
45
50
55
дится через канал крана 110 в питаю- ще-отводящий кран дозатора. При дальнейшем повороте распределительного крана 110 камера 104 соединяется с выходным, а камера 105 - с входным каналом питающе-отводящего крана, и процесс повторяется. Этот весовой дозатор снабжен счетным устройством, показанным на фиг. 3.
На фиг. 23 показана упрощенная схема весового дозатора, рассмотренного на фиг. 22.
В весовом дозаторе (фиг. 25) вы- теснительные элементы выполнены в виде сильфонов 112 и 113, соединенных общим штоком 114. Этот весовой дозатор работает аналогично весовому дозатору на фиг. 7. Преимущество этого дозатора - отсутствие утечек дозируемого вещества.
В дозаторе (фиг. 24) вытеснитель- ные элементы могут быть выполнены в виде гибких мембран 115 с толкателями 116. Толкатели приводятся в движение неподвижным кулачком 117.
Преимуществом этого дозатора явля. ется отсутствие утечек и надежность работы при лкн х давлениях во впускном трубопроводе. Работа этого вей... го дозатора аналогична работе несиь. го дозатора на фиг. 13.
На фиг. 26 показан весовой дозатор с вытеснительными лопастями 118, расположенными в пазах 119 корпуса 120 грузоприемного устройства. Ротор 121 выполнен полым, а внутреннее пространство разделено перегородкой 122 на две полости.
Одна полость через канал 123 постоянно соединена с входным трубопроводом 125 дозатора, а вторая полость через канал 124 постоянно соединена с выходным трубопроводом 126 дозатора. Кроме того, внутренние полости
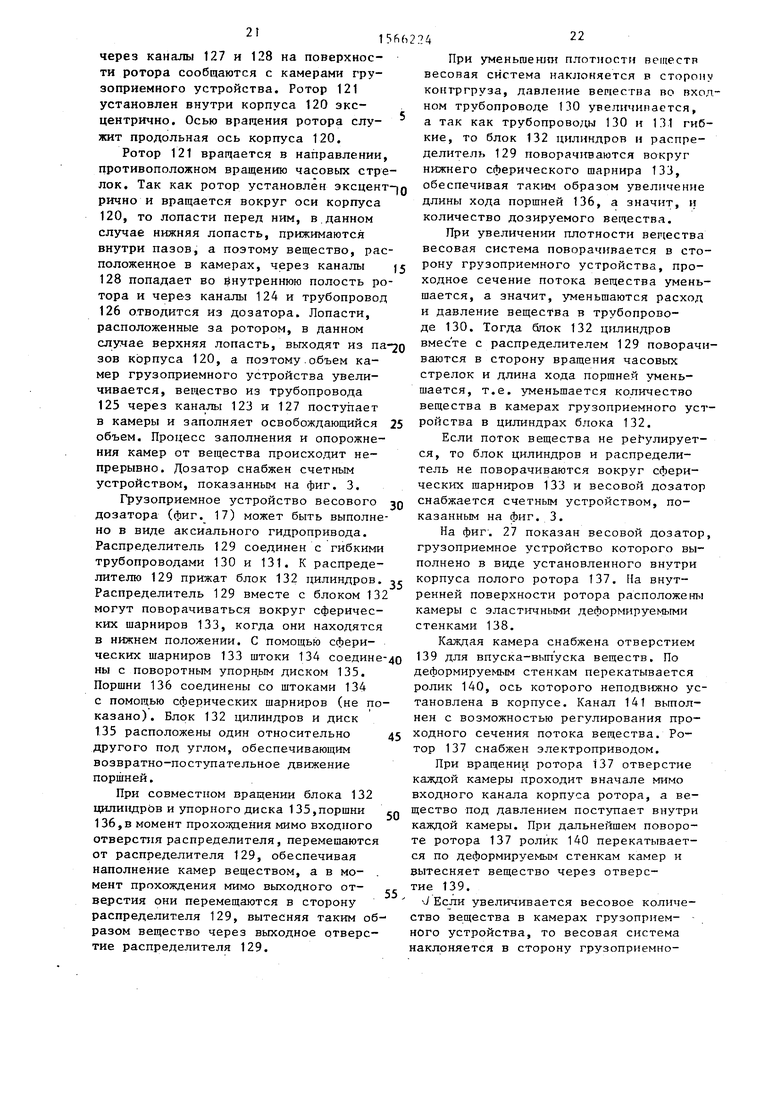
через каналы 127 и 128 на поверхности ротора сообщаются с камерами гру- зоприемного устройства. Ротор 121 установлен внутри корпуса 120 эксцентрично. Осью вращения ротора служит продольная ось корпуса 120.
Ротор 121 вращается в направлении, противоположном вращению часовых стреПри уменьшении плотности вещестп весовая система наклоняется в сторон контргруза, давление вещества во вхо ном трубопроводе 130 увелшпшается, а так как трубопровода 130 н 131 гиб кие, то блок 132 цилиндров и распределитель 129 поворачиваются вокруг нижнего сферического шарнира 133,
лок. Так как ротор установлен эксцент-,0 обеспечивая таким образом увеличение
длины хода поршней 136, а значит, количество дозируемого вещества.
рично и вращается вокруг оси корпуса 120, то лопасти перед ним, в данном случае нижняя лопасть, прижимаются внутри пазов, а поэтому вещество, расположенное в камерах, через каналы 15 128 попадает во йнутреннюю полость ротора и через каналы 124 и трубопровод 126 отводится из дозатора. Лопасти, расположенные за ротором, в данном случае верхняя лопасть, выходят из па-20 зов корпуса 120, а поэтому объем камер грузоприемного устройства увеличивается, вещество из трубопровода 125 через каналы 123 и 127 поступает в камеры и заполняет освобождающийся 25 объем. Процесс заполнения и опорожнения камер от вещества происходит непрерывно. Лозатор снабжен счетным устройством, показанным на фиг. 3.
Грузоприемное устройство весового 0 дозатора (фиг. 17) может быть выполнено в виде аксиального гидропривода. Распределитель 129 соединен с гибкими трубопроводами 130 и 131. К распределителю 129 прижат блок 132 цилиндров. 35 корпуса полого ротора 137. На внут45
Распределитель 129 вместе с блоком 132 могут поворачиваться вокруг сферических шарниров 133, когда они находятся в нижнем положении. С помощью сферических шарниров 133 штоки 134 соедине-до ны с поворотным упорным диском 135. Поршни 136 соединены со штоками 134 с помощью сферических шарниров (не показано). Блок 132 цилиндров и диск 135 расположены один относительно другого под углом, обеспечивающим возвратно-поступательное движение поршней.
При совместном вращении блока 132 цилиндров и упорного диска 135,поршни 136,в момент прохождения мимо входного отверстия распределителя, перемешаются от распределителя 129, обеспечивая наполнение камер веществом, а в момент прохождения мимо выходного отверстия они перемещаются в сторону распределителя 129, вытесняя таким образом вещество через выходное отверстие распределителя 129.
50
55
реннеи поверхности ротора расположе камеры с эластичными деформируемыми стенками 138.
Каждая камера снабжена отверстием 139 для впуска-вып уска веществ. По деформируемым стенкам перекатывается ролик 140, ось которого неподвижно у тановлена в корпусе. Канал 141 выпол нен с возможностью регулирования про ходного сечения потока вещества. Ротор 137 снабжен электроприводом.
При вращении ротора 137 отверстие каждой камеры проходит вначале мимо входного канала корпуса ротора, а ве щество под давлением поступает внутр каждой камеры. При дальнейшем поворо те ротора 137 ролик 140 перекатывает ся по деформируемым стенкам камер и вытесняет вещество через отверстие 139.
v/ Если увеличивается весовое количе ство вещества в камерах грузоприемного устройства, то весовая система наклоняется в сторону грузоприемноПри уменьшении плотности вещестп весовая система наклоняется в сторону контргруза, давление вещества во вхоя- ном трубопроводе 130 увелшпшается, а так как трубопровода 130 н 131 гибкие, то блок 132 цилиндров и распределитель 129 поворачиваются вокруг нижнего сферического шарнира 133,
обеспечивая таким образом увеличение
длины хода поршней 136, а значит, количество дозируемого вещества.
При увеличении плотности вещества весовая система поворачивается в сторону грузоприемного устройства, проходное сечение потока вещества уменьшается, а значит, уменьшаются расход и давление вещества в трубопроводе 130. Тогда блок 132 цилиндров вместе с распределителем 129 поворачиваются в сторону вращения часовых стрелок и длина хода поршней уменьшается, т.е. уменьшается количество вещества в камерах грузопрнемного устройства в цилиндрах блока 132.
Если поток вещества не регулируется, то блок цилиндров и распределитель не поворачиваются вокруг сферических шарниров 133 и весовой дозатор снабжается счетным устройством, показанным на фиг. 3.
На фиг. 27 показан весовой дозатор, грузоприемное устройство которого выполнено в виде установленного внутри
45
до 50
5
реннеи поверхности ротора расположены камеры с эластичными деформируемыми стенками 138.
Каждая камера снабжена отверстием 139 для впуска-вып уска веществ. По деформируемым стенкам перекатывается ролик 140, ось которого неподвижно установлена в корпусе. Канал 141 выполнен с возможностью регулирования проходного сечения потока вещества. Ротор 137 снабжен электроприводом.
При вращении ротора 137 отверстие каждой камеры проходит вначале мимо входного канала корпуса ротора, а вещество под давлением поступает внутри каждой камеры. При дальнейшем повороте ротора 137 ролик 140 перекатывается по деформируемым стенкам камер и вытесняет вещество через отверстие 139.
v/ Если увеличивается весовое количество вещества в камерах грузоприемного устройства, то весовая система наклоняется в сторону грузоприемного устройства, проходное сечение потока вещества в зоне канала 141 уменьшается, уменьшаются давление и расход вещества во впускном трубопроводе. Поэтому стенки 138 камер деформируются меньше и в камеры поступает меньше вещества.
При уменьшении количества вещества в камерах грузоприемного устройства весовая система наклоняется в сторону контргруза, давление вещества во входном трубопроводе и степень наполнения камер увеличиваются.
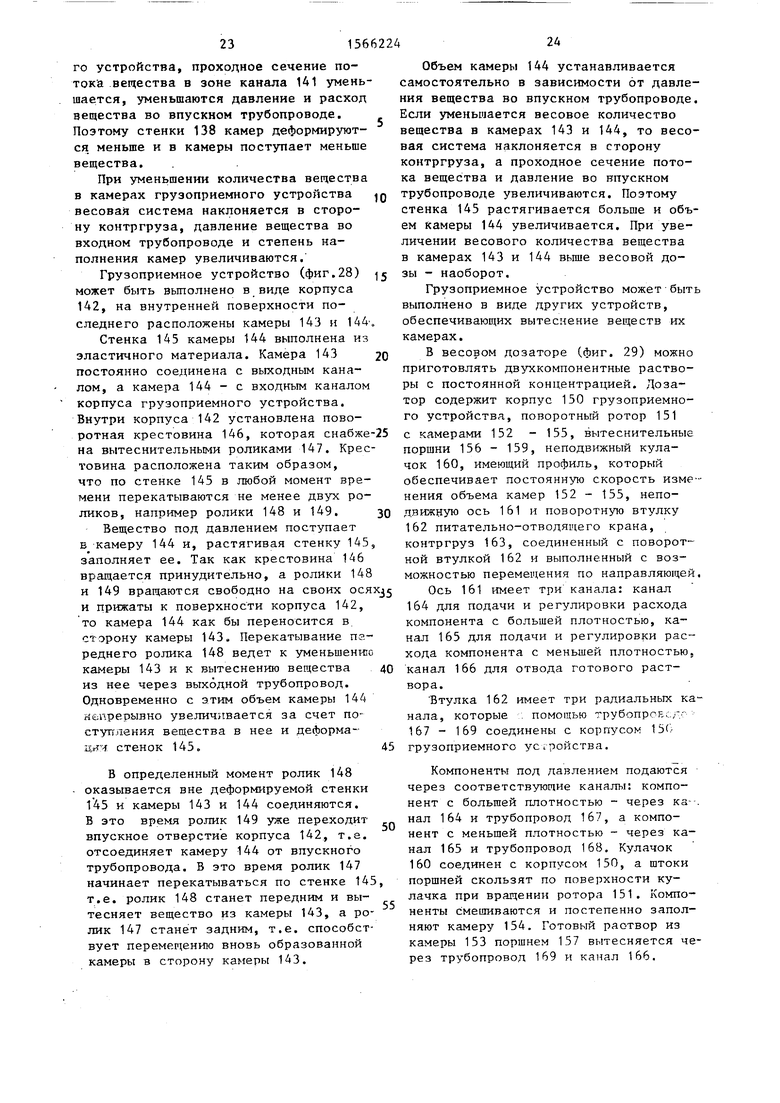
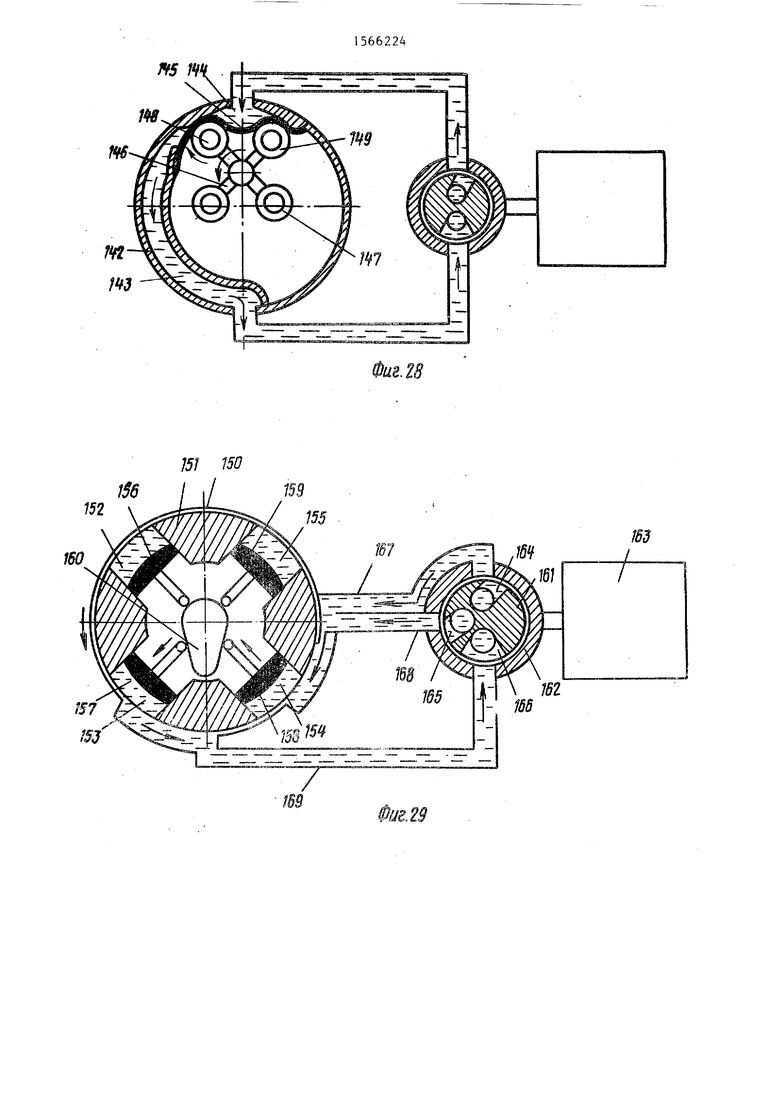
Грузоприемное устройство (фиг.28) может быть выполнено в виде корпуса 142, на внутренней поверхности последнего расположены камеры 143 и 144
Стенка 145 камеры 144 выполнена из эластичного материала. Камера 143 постоянно соединена с выходным каналом, а камера 144 - с входным каналом корпуса грузоприемного устройства. Внутри корпуса 142 установлена поворотная крестовина 146, которая снабже на вытеснительными роликами 147. Крестовина расположена таким образом, что по стенке 145 в любой момент времени перекатываются не менее двух роликов, например ролики 148 и 149.
Вещество под давлением поступает в камеру 144 и, растягивая стенку 145, заполняет ее. Так как крестовина 146 вращается принудительно, а ролики 148 и 149 вращаются свободно на своих OCHXJJ и прижаты к поверхности корпуса 142, то камера 144 как бы переносится в сторону камеры 143. Перекатывание реднего ролика 148 ведет к уменьшению
камеры 143 и к вытеснению вещества из нее через выходной трубопровод. Одновременно с этим объем камеры 144 Нигферывно увеличивается за счет поступления вещества в нее и деформа- а,ич стенок 145.
В определенный момент ролик 148 оказывается вне деформируемой стенки 145 и камеры 143 и 144 соединяются. В это время ролик 149 уже переходит впускное отверстие корпуса 142, т.е. отсоединяет камеру 144 от впускного трубопровода. В это время ролик 147 начинает перекатываться по стенке 145 т.е. ролик 148 станет передним и вытесняет вещество из камеры 143, а ролик 147 станет задним, т.е. способствует перемещению вновь образованной камеры в сторону камеры 143.
Q
0 5
0
JJ
40
45
50
55
Объем камеры 144 устанавливается самостоятельно в зависимости от давления вещества во впускном трубопроводе. Если уменьшается весовое количество вещества в камерах 143 и 144, то весовая система наклоняется в сторону контргруза, а проходное сечение потока вещества и давление во впускном трубопроводе увеличиваются. Поэтому стенка 145 растягивается больше и объем камеры 144 увеличивается. При увеличении весового количества вещества в камерах 143 и 144 выше весовой дозы - наоборот.
Грузоприемное устройство может быть выполнено в виде других устройств, обеспечивающих вытеснение веществ их камерах.
В весовом дозаторе (фиг. 29) можно приготовлять двухкомпонентные растворы с постоянной концентрацией. Дозатор содержит корпус 150 грузоприемного устройства, поворотный ротор 151 с камерами 152 - 155, вытеснительные поршни 156 - 159, неподвижный кулачок 160, имеющий профиль, который обеспечивает постоянную скорость изменения объема камер 152 - 155, неподвижную ось 161 и поворотную втулку 162 питательно-отводящего крана, контргруз 163, соединенный с поворотной втулкой 162 и выполненный с возможностью перемещения по направляющей,
Ось 161 имеет три канала: канал 164 для подачи и регулировки расхода компонента с большей плотностью, канал 165 для подачи и регулировки расхода компонента с меньшей плотностью. канал 166 для отвода готового раствора.
Втулка 162 имеет три радиальных канала, которые помощью рубопр Е.. 167 - 169 соединены с корпусом 15( грузоприемного ус тойства.
Компоненты под давлением подаются через соответствующие каналы: компонент с большей плотностью - через ка нал 164 и трубопровод , а компонент с меньшей плотностью - через канал 165 и трубопровод 168. Кулачок 160 соединен с корпусом 150, а штоки поршней скользят по поверхности кулачка при вращении ротора 151. Компоненты смешиваются и постепенно заполняют камеру 154. Готовый раствор из камеры 153 поршнем 157 вытесняется через трубопровод 169 и канал 166.
2515М
Скорость упеличення рабочего объема камеры 154 равна скорости уменьшения рабочего объема камеры 153, т.е. суммарное перемещение поршней из тех камер, которые наполняются, равно суммарному перемещению поршней тех камер, из которых готовый раствор вытесняется. Другими словами, объем
раствора во всех камерах должен оста
ваться неизменным.
Постоянная концентрация раствора обеспечивается в том случае, если через трубопроводы 167 и 168 поступают пропорциональные весовые количест- ва компонентов. Если через трубопровод 167 поступает большее количество вещества, чем через трубопровод 168, то общая плотность раствора увеличивается, увеличивается и весовое коли- чество вещества в камерах грузоприем- ного устройства. Поэтому весовая система наклоняется в сторону грузопри- емного устройства, проходное сечение потока вещества с большей плотностью на переходе из канала 164 в трубопровод 167 уменьшается, а значит, уменьшается и расход вещества с большей плотностью. Поэтому процент вещества с меньшей плотностью увеличивается, следовательно, уменьшается общая плотность раствора. Наклон весовой системы прекращается.
Если увеличивается расход вещества с меньшей плотностью (которое поступает через трубопровод 168), то общая плотность раствора уменьшается (уменьшается доля вещества с большей плотностью), а значит, меньше станет весовое количество раствора в камерах грузоприемного устройства. Поэтому весовая система наклоняется в сторону контргруза 163, проходное сечение потока вещества с меньшей плотностью на проходе из канала 165 в трубопровод 168 уменьшается, а поэтому уменьшается расход вещества с меньшей плотностью, так как доля вещества с меньшей плотностью уменьшается, то увеличивается доля вещества с большей плотное- тью, что приводит к повышению общей плотности раствора до нормальной величины .
Кроме того, при наклонении весовой системы в одну или другую сторону происходит одновременное увеличение (или уменьшение) расхода первого и уменьшение (или увеличение) расхода второго вещества, что ускоряет про
24
26
10
30
« 0 25
.с
35
5
цесс регулирования общей плотности раствора. Каналы в оси 161 и во втулке 162 могут быть выполнены таким образом, что при наклонении весовой системы в одну или другую сторону изменяется только расход одного вещества, а расход второго остается нерегулируемым. В этом случае расход первого вещества меняется всегда пропорционально любым изменениям расхода второго вещества.
Плотность раствора, а значит, и соотношение компонентов регулируются перемещением контргруза 163 по направляющей. При перемещении контргруза 163 от втулки 16 увеличивается момент, стремящийся наклонять весовую систему в сторону контргруза. Чтобы весовая система оставалась в равновесии, должна увеличиться плотность раствора, а это может произойти если увеличится расход вещества с большей плотностью, т.е. увеличивается процентное содержание вещества с большей плотностью. Если контргруз 163 перемещается в сторону втулки 162, то увеличивается процентное содержание вещества с меньшей плотностью.
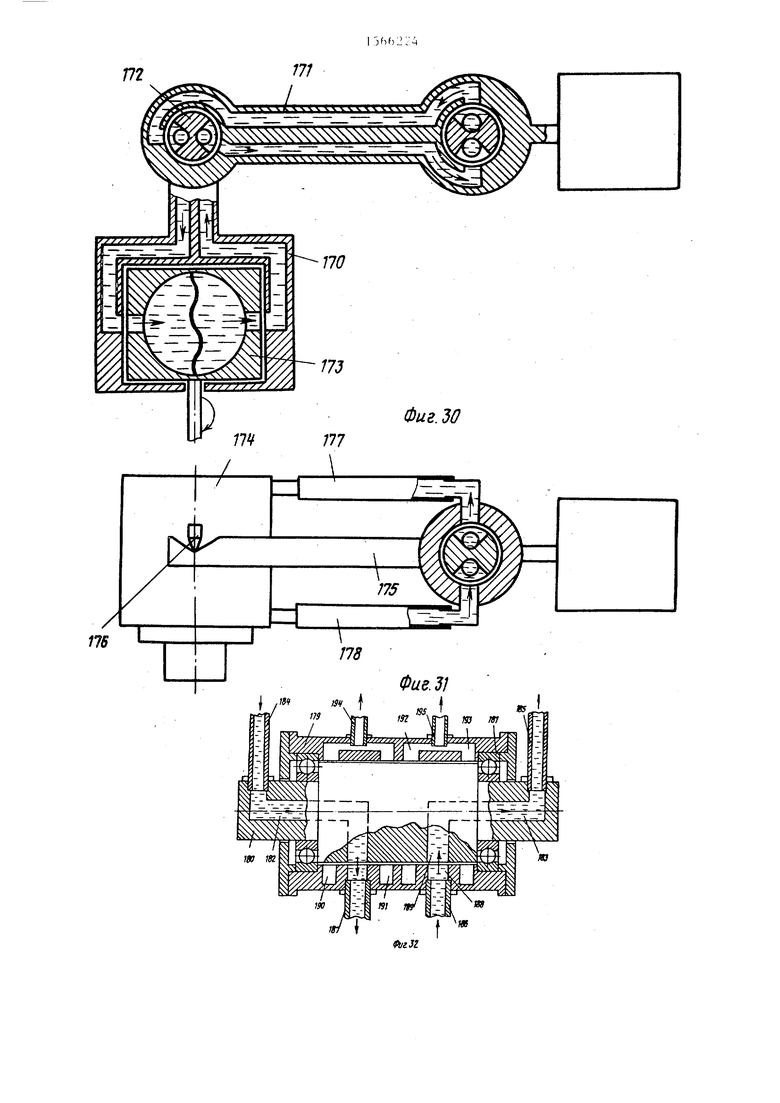
Кроме того, что устройство дает возможность приготовлять двухкомпо- нентные растворы, оно дает возможность дозировать их с постоянным весовым расходом. Так как камеры грузоприемного устройства последовательно наполняются и опорожняются веществом, то и центр тяжести грузоприемного устройства меняется. С целью исключения этого влияния на точность дозирования корпус 170 (&иг. 30) грузоприемного устройства соединен с рычажной системой 1/1 подвижно с помощью крана 172, который обеспечивает подвод и отвод вещества из грузоприемного устройства без влияния на поток вещества.
Кроме того, с целью исключения влияния реактивных моментов, обусловленных вращением ротора 173 (или движением поршней, толкателей и т.д.), плоскость вращения ротора 173 (или направление перемещения деталей, движущихся возвратно-поступательно) перпендикулярна плоскости действия рычажной системы.
На фиг. 31 показан весовой дозатор, в котором корпус грузоприемного устройства 174 установлен на рычажную систему 175 подвижно с помощью
27 i5
призм 176 и снабжен гибкими трубопроводами 177 и 178; Плоскость вращения ротора перпендикулярна плоскости действия рычажной системы.
Питательно-отводящий кран лучше всего выполнить в виде неподвижной втулки 179 (.фиг. 32) и поворотной оси 180 (с целью упрощения схем на остальных фигурах показано, что кран выполнен в виде неподвижной оси и поворотной втулки). Ось 180 установлена во втулке 179 на шарикоподшипниках 181 и снабжена каналами 182 и 183 для подвода и отвода веществ из гру- зоприемного устройства.
С этими каналами соединены соответственно питательный (впускной) 184 и отводящий (выпускной) 185 трубопроводы. Втулка 179 снабжена каналами и трубопроводами 186 и 187 для подачи и отвода веществ из оси 180. Радиальные каналы 188 и 189 служат еще и для регулировки расхода веществ .
С целью отвода утечек с обеих сторон каждого радиального канала втулки выполнены кольцевые выточки 190 - 193, которые попарно соединены осевыми каналами и трубопроводами 194 и 195.
Снабжение грузоприемного устройства вытеснительными устройствами, обеспечивающими одновременное согласованное изменение объема рабочих ка- мер, обеспечивает поступление и отвод веществ из грузоприемного устройства с одинаковым расходом, что дает возможность уменьшить непрерывные колебания рычажной системы и таким образом повысить точность дозирования, обеспечить дозирование и отвод лег- ки спарнющкхся: жи/дсоетей и газообразных «аществ, приготовлять и дозиро- Е.-;ГЬ двухксмпонентные растворы.
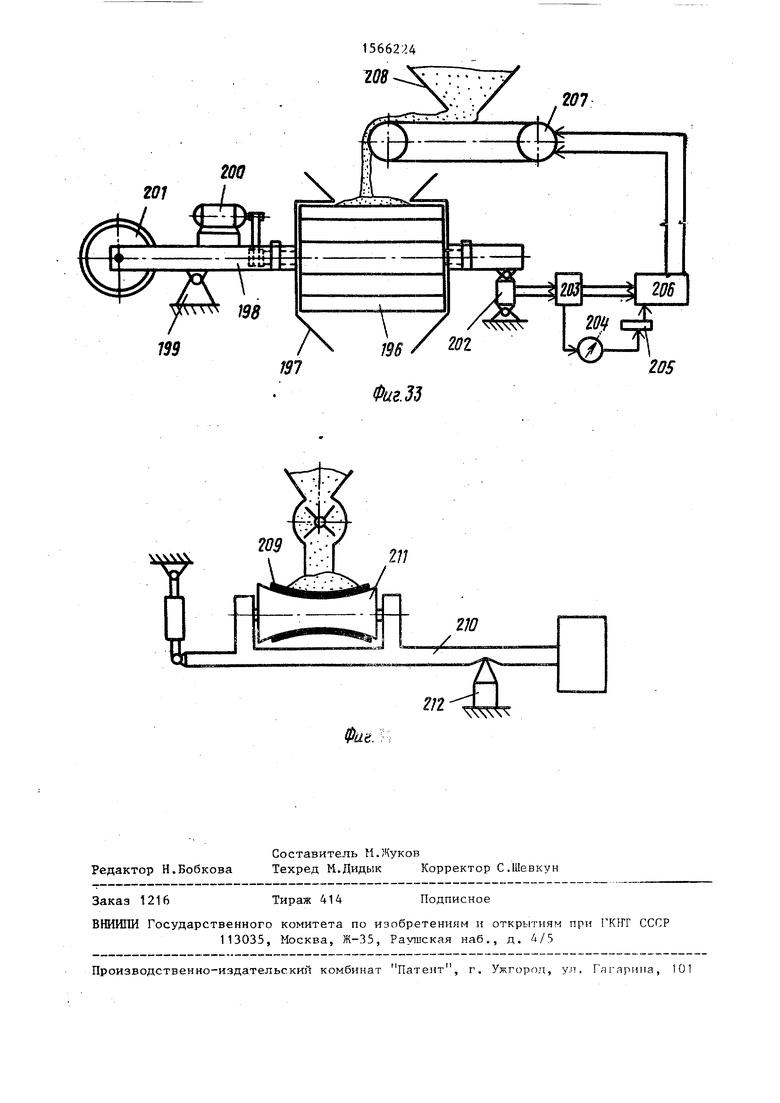
Весовой дозатор (фиг. 33) имеет ртор 196, корпус 197 ротора установленный на раме 198, которая установлена шарнирно на неподвижную опору 199. Ротор 196 снабжен электропри водом 200. Все указанные части дозатора уравновешены контргрузом 201.
Система управления дозатором состоит из силоизмерителя 202, на кото
0
5
0
5
m
,с
о
40
45
28
ром опирается второй конец рамы 198, электроизмерительного моста 203 счетчика (не показан), указателя 204 производительности, задатчика 205 производительности, регулятора 206 скорости, ленточного питателя 207. Питательное устройство, кроме питателя 207 имеет бункер 208.
В статическом состоянии дозатора вес вещества, содержащегося в ячейках ротора, через раму 198 действует на силоизмеритель 202 в плоскости действия весовой системы.
В весовом дозаторе (фиг. 34) активный рабочий орган выполнен в виде ленточного транспортера 209, установленного на весовую систему 210 таким образом, что плоскость вращения барабанов 211 и ленты и направление движения вещества перпендикулярны плоскости действия весовой системы,- т.е. вещество действует на весовую систему в ппоскости действия весовой системы. Поэтому моменты инерции и реактивные моменты, действующие в плоскости вращения ленты, стремятся скручивать весовую систему 210, а не отклонять ее относительно опоры 212. Этим достигается повышение точности дозирования.
Формула изобретения
в виде объемного дозатора с измерительными камерами, объем которых изменяется в процессе измерения.
§
rvj
тг
;ЖШ
if
F
Ј
л
I
S -
LH ОЧ O N9 N
Риг. 10
Риг. 12
I
§
v 55
I
%
87
89
131 Фиг. 17
fas. 7Я
§
Xj
зCM
гм
vO tn
f
N3 «I
5
N3
и
ЧГ
см ol 0 Ј Ш
&
ass «
i
т
Составитель М.Жуков Редактор Н.Бобкова Техред М.Дидык Корректор С.Шевкун
Заказ 1216
Тираж 414
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, уп. Гагарина, 101
205
Подписное
| Весовой дозатор жидкости | 1974 |
|
SU521473A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
