ел
О5 J 
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОРЯДНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2014 |
|
RU2583117C1 |
| ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2264553C1 |
| Устройство для позиционирования и круговых подач планшайбы металлорежущего станка | 1988 |
|
SU1590317A1 |
| Привод исполнительного механизма горного комбайна | 1988 |
|
SU1707196A1 |
| Двухступенчатый редуктор верхнего силового привода буровой установки | 2016 |
|
RU2646289C1 |
| Привод перемещений рабочих органов металлорежущих станков | 1988 |
|
SU1618966A1 |
| РУЧНОЙ ЭЛЕКТРИЧЕСКИЙ ПЕРФОРАТОР | 1992 |
|
RU2057634C1 |
| Многоступенчатый редуктор верхнего силового привода буровой установки | 2016 |
|
RU2646288C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ РЕДУКТОР ТУРБОВИНТОВНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2532089C1 |
| Привод горного комбайна | 1989 |
|
SU1671853A1 |
Изобретение относится к приводам тяжелонагруженных машин, работающих в режиме стопорения рабочего органа (РО). Цель - повышение надежности за счет выравнивания нагрузок между зубчатыми колесами редуктора, защиты от перегрузок и гашения сил инерции вращающихся масс при стопорении РО. Привод РО землеройной машины включает электродвигатель 1 с системой управления, связанный муфтой 2 с быстроходным валом 3 зубчатого редуктора (Р) 4, передающего лоток мощности параллельными ветвями зубчатых колес. Выходной вал 5 Р 4 соединен с РО 6. Между зубчатыми косозубыми колесами 7, установленными на промежуточном валу 8 Р 4, размещено упругое звено 9, соединенное вспомогательными элементами с датчиком 10 перемещения. Упругое звено выполнено в виде сильфона. Вал 8, на котором установлен сильфон, выполнен полым и имеет размещенный в нем силовой гидроцилиндр, связанный с датчиком 10 перемещения посредством упорного подшипника и пружины. С целью сохранения зацепления ширина косозубых колес 7 больше ширины колес параллельного смежного вала на величину осевого перемещения упругого звена 9. При возникновении нагрузок на РО косозубые колеса 7 под действием осевых сил, сжимая упругое звено 9, перемещаются по шлицам вала 8 и вдоль зубьев контактирующих колес, выравнивая тем самым нагрузку. Давление от упругого звена передается на поршень гидроцилиндра и далее к датчику 10. Последний связан с системой управления электродвигателем и позволяет осуществлять регулирование привода и его отключение при заданных нагрузках. 2 з.п. ф-лы, 3 ил.
С целью сохранения зацепления ширина косозубых колес 7 больше ширины колес параллельного смежного нала на величину осевого перемещения упругого звена 9. При возникновении нагрузок на РО косозубые колеса 7 под действием осевых сил, сжимая упругое звено 9, перемещаются по шлицам вала 8 и вдоль зубьев контакИзобретение относится к приводам тяжелонагруженных машин, работающих в режиме стопорения рабочего органа, в частности к конструкциям приводов рабочих органов роторных экскаваторов .
Целью изобретения является повышение надежности работы за счет выравнивания нагрузок между зубчатыми колесами редуктора, защиты от перегрузок и гашения сил инерции вращающихся масс при стопорении рабочего органа.
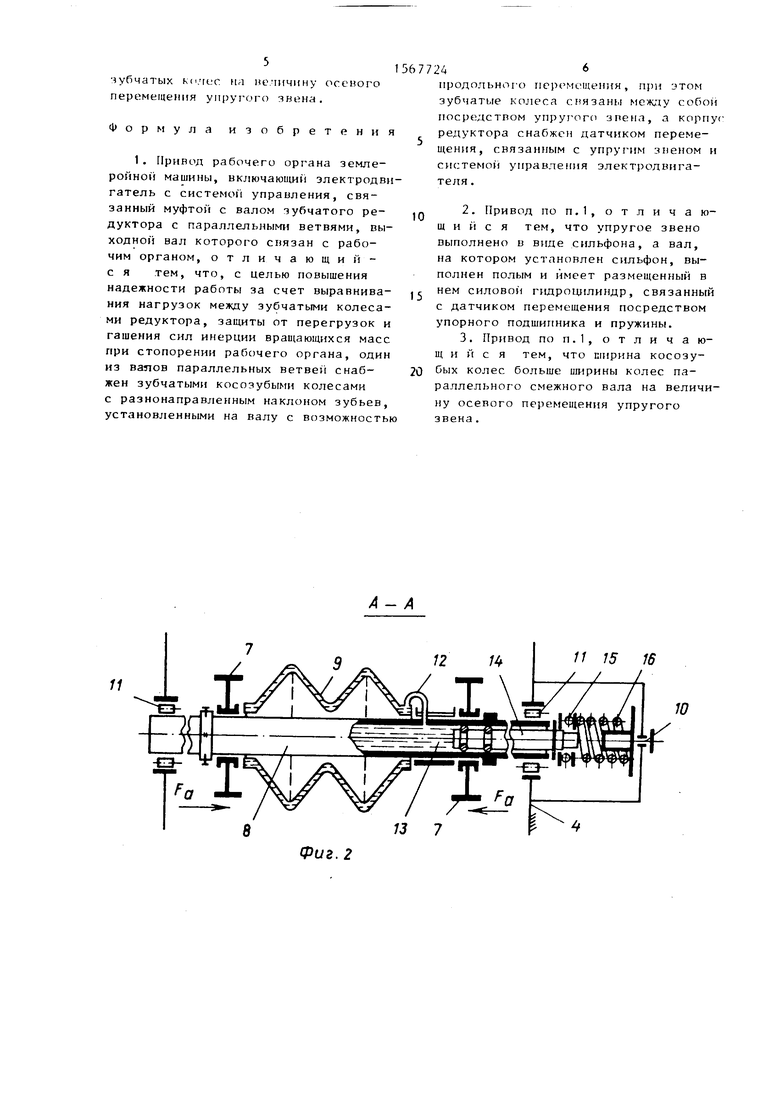
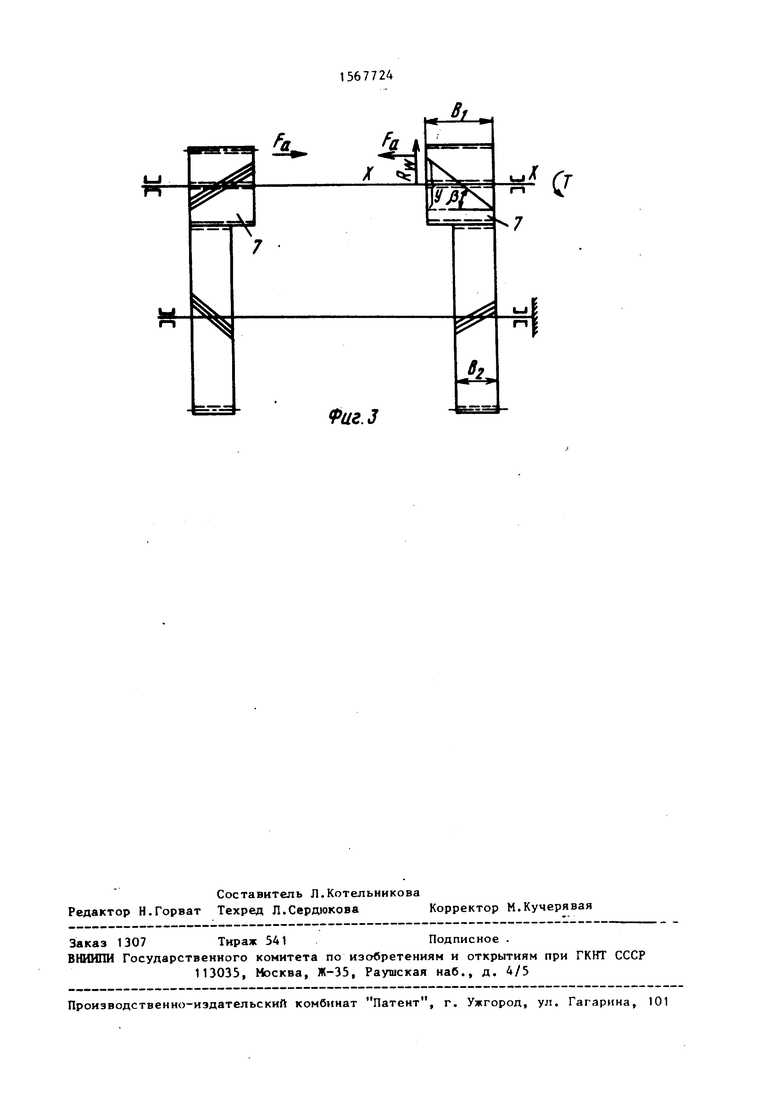
На фиг.1 изображен привод рабочего органа машины; на фиг.2 - сечение А-А на фиг.1; на фиг.З - схема зацепления зубчатых колес в редукторе.
При вод рабочего органа машины (фиг.1) содержит электродвигатель 1, с системой управления, соединненный муфтой 2 с быстроходным валом 3 зубчатого редуктора 4, передающего поток мощности параллельными ветвями зубчатых колес. Выходной вал 5 редуктора Ц соединен с рабочим органом 6. Между зубчатыми косозубыми колесами 7, установленными на промежуточном валу 8 редуктора 4, размещено упругое звено 9, соединенное вспомогательными элементами с датчиком перемещения (месдозои) 10. На фиг.2 дано сечение А-А редуктора по промежуточному валу 8. На этом валу установлены косозубые зубчатые колеса 7, имеющие возможность относительного осевого перемещения на шлицах без возможности относительного разворота. Вал 8 вращается в подшипниках 11. Между внутренними торцами зубчатых колес 7 размещено упругое звено 9, выполненное, например, в виде сильфона, соединенного гидропроводом 12 с силовым гид- роцилиндрпм 13. Поршень 14 гидротирующих колес, выравнивая тем самым нагрузку. Давление от упругого звена передается на поршень гидро- цнлиндра и далее к датчику 10. Последний связан с системой управления электродвигателем и позволяет осуществлять регулирование привода и его отключение при заданных нагруз- ках. 2 з.п. ф-лы, 3 ил.
ципиндра 13 через упорный подшипник 15 и пружины 16 сжатия воздействуют на месдозу 10, соединенную с корпусом редуктора 4. Устройство работает следующим образом.
При возникновении (мгручкн на рабочем органе косоэубые колеса 7 под
действием осевых сил FQ , сжимая упругое звено 9, перемещаются по шлицам вала 8 и вдоль зубьев сопряженных контактирующих колес, выравнивая тем самым нагрузку. Давление от упРУгого звена (сильфона) 9 по гидропроводу 12 передается на поршень 14 гидроцилиндра 13 и далее через упорный подшипник 15 - на пружины сжатия 16 к месдозе 10. Требуемая жесткость упругого эвена 9 (сильфона) обеспечивается путем изменения жесткости пружин 16, которые одновременно выполняют роль компенсатора давления в гидросистеме при изменениях температуры окружающей среды. Месдоэа 10 электрически связана с системой управления электродвигателем и позволяет осуществлять регулирование привода и его отключение при заданных
нагрузках. В режиме стопорения рабочего органа после отключения электродвигателя месдоз.ой гашение сил инерции вращающегося ротора электродвигателя и зубчатых колес редуктора
осуществляется за счет перевода их вращательного движения в поступательное относительно неподвижных зубьев смежных колес (которые застопорены вместе с рабочим органом) и дополнительного сжатия упругого звена 9. С целью сохранения зацепления (длины контакта зубьев) при смещении копес подвижные в осевом направлении колеса выполнены шире сопряженных
5
зубчатых Ы лег ил нечичину осевого перемещения упругого звена.
Формула изобретения
11
15677246
продольного перемещения, при этом
зубчатые колеса связаны между собой посредством упругого зпенл, а корпус- редуктора снабжен датчиком перемещения, связанным с упругим звеном и системой управления электродвигателя .
А- А
11 15 16 //
Ч
Фиг.З
| Устройство для очистки открытых ирригационных лотков | 1986 |
|
SU1352009A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Привод механизма поворота верхнего строения экскаватора | 1982 |
|
SU1027337A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
