/////////Z 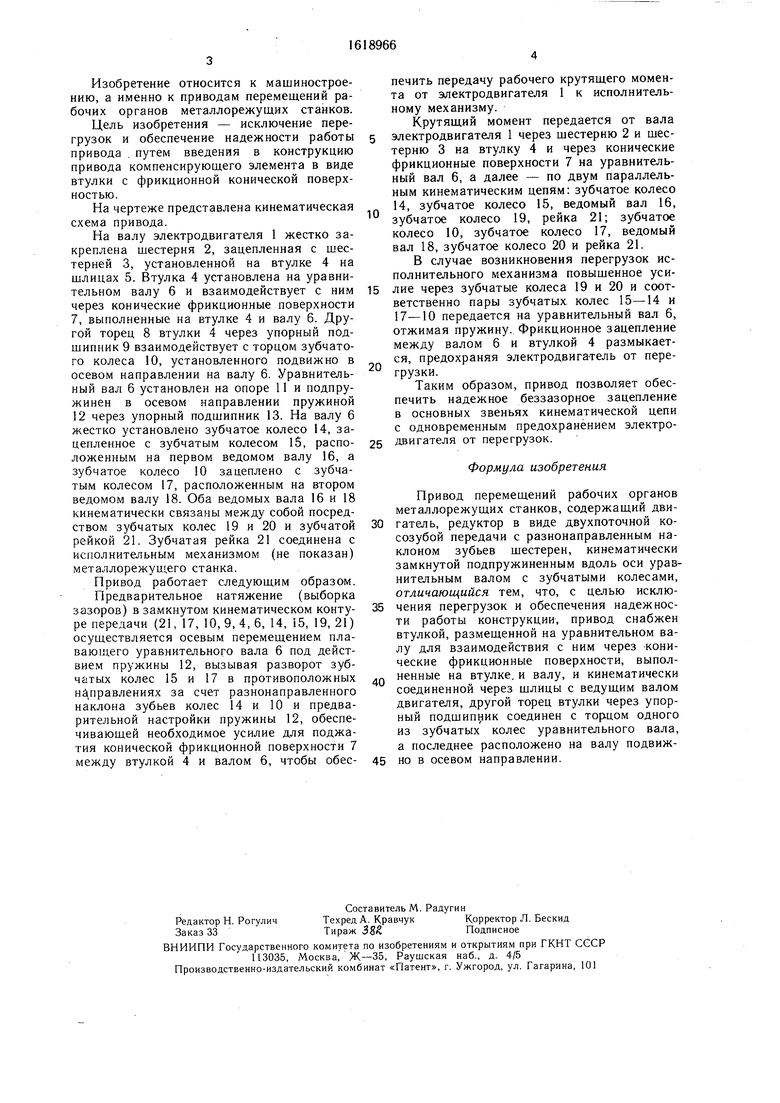
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования и круговых подач планшайбы металлорежущего станка | 1988 |
|
SU1590317A1 |
| КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019441C1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
| Привод исполнительного механизма горного комбайна | 1988 |
|
SU1707196A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ВИНТОВАЯ СИЛОВАЯ ГОЛОВКА | 1968 |
|
SU217890A1 |
| Привод вертикальной роликовой мельницы | 1983 |
|
SU1135490A1 |
| Устройство для измерения работы дизельных двигателей | 1990 |
|
SU1744525A1 |
| ЭЛЕКТРОМОТОР-КОЛЕСО ДЛЯ ТРАНСПОРТНЫХ МАШИН | 1970 |
|
SU268193A1 |
| БЕСФЛАТТЕРНАЯ МНОГОДИСКОВАЯ ФРИКЦИОННАЯ МУФТА ДЛЯ СОЕДИНЕНИЯ ВАЛОВ ПРИВОДА С ВОЗМОЖНОСТЬЮ РАЗНОНАПРАВЛЕННОГО ИХ ВРАЩЕНИЯ | 2016 |
|
RU2618661C1 |
| Коробка передач транспортного средства | 1986 |
|
SU1411168A1 |
Изобретение относится к машиностроению Цель изобретения - исключение перегрузок и обеспечение надежности в работе Привод, содержащий электродвигатель 1 и редуктор в виде двухпоточной косозубой передачи с разнонаправленным наклоном зубьев зубчатых колес 10 и 14, установленных на уравнительном валу 6, снабжен втулкой 4, кинематически замыкающей оба потока передачи посредством фрикционных конических поверхностей 7, выполненных на втулке 4 и валу 6, настраиваемых на рабочие нагрузки с помощью пружины 12 На втулке 4 посредством шлицев 5 установлена шестерня 3, зацепленная с шестерней 2, закрепленной на валу электродвигателя При работе привода втулка 4 в совокупности с уравнительным валом 6 и прхжиной 12 позволяет обеспечить надежное беззазорное зацепление основных эвеньев кинематической цепи и при возникновении перегрузок на исполнительном механизме кинематически отключить электродвигатель от редуктора. 1 ил (С
/ / 2 20
Изобретение относится к машиностроению, а именно к приводам перемещений рабочих органов металлорежущих станков.
Цель изобретения - исключение перегрузок и обеспечение надежности работы привода путем введения в конструкцию привода компенсирующего элемента в виде втулки с фрикционной конической поверхностью.
На чертеже представлена кинематическая схема привода.
На валу электродвигателя 1 жестко закреплена шестерня 2, зацепленная с шестерней 3, установленной на втулке 4 на шлицах 5. Втулка 4 установлена на уравнительном валу 6 и взаимодействует с ним через конические фрикционные поверхности 7, выполненные на втулке 4 и валу 6. Другой торец 8 втулки 4 через упорный подшипник 9 взаимодействует с торцом зубчатого колеса 10, установленного подвижно в осевом направлении на валу 6. Уравнительный вал 6 установлен на опоре 11 и подпружинен в осевом направлении пружиной 12 через упорный подшипник 13. На валу 6 жестко установлено зубчатое колесо 14, зацепленное с зубчатым колесом 15, расположенным на первом ведомом валу 16, а зубчатое колесо 10 зацеплено с зубчатым колесом 17, расположенным на втором ведомом валу 18. Оба ведомых вала 16 и 18 кинематически связаны между собой посредством зубчатых колес 19 и 20 и зубчатой рейкой 21. Зубчатая рейка 21 соединена с исполнительным механизмом (не показан) металлорежущего станка.
Привод работает следующим образом.
Предварительное натяжение (выборка зазоров) в замкнутом кинематическом контуре передачи (21, 17, 10,9,4,6, 14, 15, 19, 21) осуществляется осевым перемещением плавающего уравнительного вала 6 под действием пружины 12, вызывая разворот зубчатых колес 15 и 17 в противоположных направлениях за счет разнонаправленного наклона зубьев колес 14 и 10 и предварительной настройки пружины 12, обеспечивающей необходимое усилие для поджа- тия конической фрикционной поверхности 7 между втулкой 4 и валом 6, чтобы обес
печить передачу рабочего крутящего момента от электродвигателя 1 к исполнительному механизму.
Крутящий момент передается от вала электродвигателя 1 через шестерню 2 и шестерню 3 на втулку 4 и через конические фрикционные поверхности 7 на уравнительный вал 6, а далее - по двум параллельным кинематическим цепям: зубчатое колесо 14, зубчатое колесо 15, ведомый вал 16, зубчатое колесо 19, рейка 21; зубчатое колесо 10, зубчатое колесо 17, ведомый вал 18, зубчатое колесо 20 и рейка 21.
В случае возникновения перегрузок исполнительного механизма повышенное уси- лие через зубчатые колеса 19 и 20 и соответственно пары зубчатых колес 15-14 и 17-10 передается на уравнительный вал 6, отжимая пружину. Фрикционное зацепление между валом 6 и втулкой 4 размыкается, предохраняя электродвигатель от перегрузки.
Таким образом, привод позволяет обеспечить надежное беззазорное зацепление в основных звеньях кинематической цепи с одновременным предохранением электро- 5 двигателя от перегрузок.
Формула изобретения
0
Привод перемещений рабочих органов металлорежущих станков, содержащий двигатель, редуктор в виде двухпоточнои ко- созубой передачи с разнонаправленным наклоном зубьев шестерен, кинематически замкнутой подпружиненным вдоль оси уравнительным валом с зубчатыми колесами, отличающийся тем, что, с целью исключения перегрузок и обеспечения надежности работы конструкции, привод снабжен втулкой, размещенной на уравнительном валу для взаимодействия с ним через конические фрикционные поверхности, выполненные на втулке, и валу, и кинематически соединенной через шлицы с ведущим валом двигателя, другой торец втулки через упорный подшипник соединен с тор-цом одного из зубчатых колес уравнительного вала, а последнее расположено на валу подвижно в осевом направлении.
| БЕЗЗАЗОРНЫЙ ПРИВОД | 1966 |
|
SU224265A1 |
