Изобретение относится к измерительной технике, а именно к устройствам преобразования параметров механического перемещения в электрический сигнал.
Целью изобретения является повышение точности измерений за счет самоюстировки датчика.
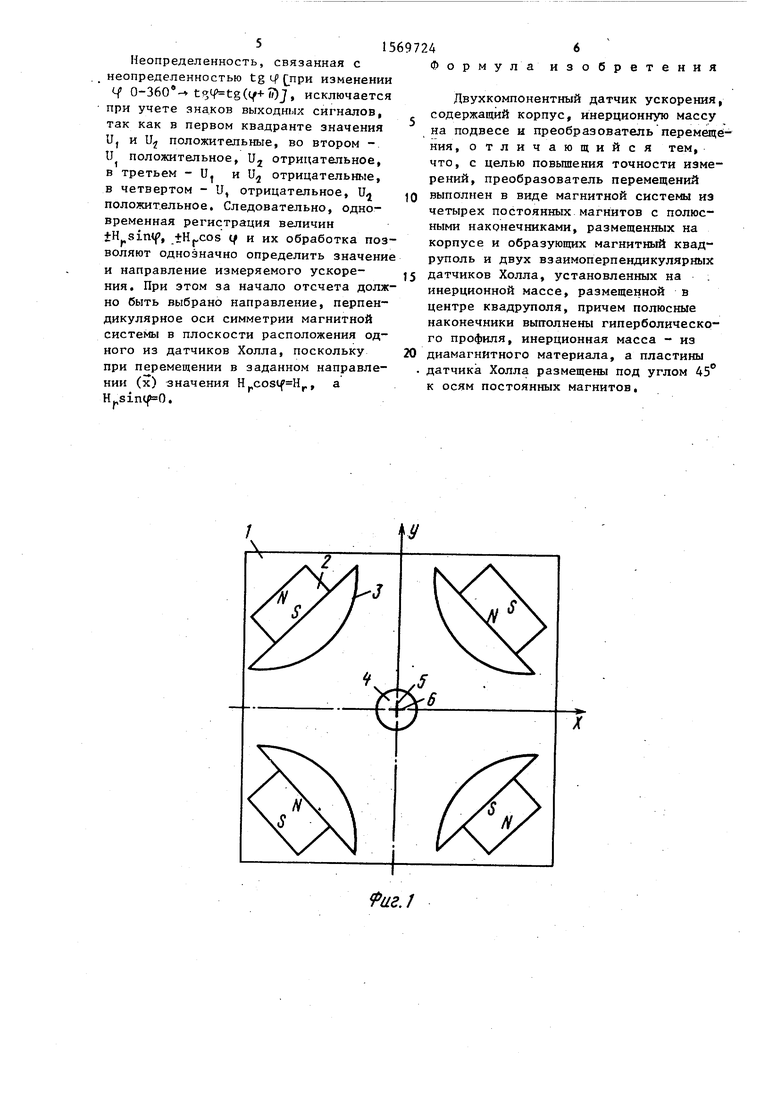
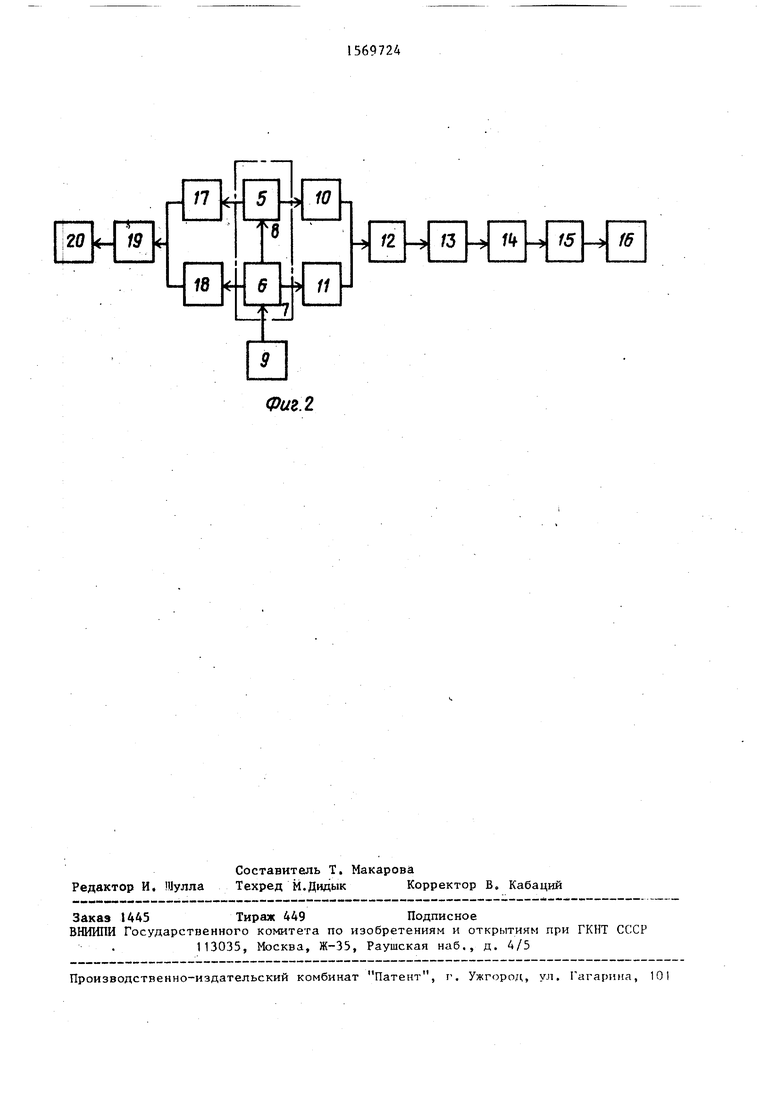
На фиг. 1 приведена принципиальная конструктивная схема предлагаемого датчика; на фиг. 2 - блок-схема обработки сигналов.
Датчик состоит из связанного с перемещающимся объектом корпуса 1 , в котором закреплена магнитная система. Магнитная система состоит из четырех магнитов 2 (например, цилиндрические самарийкобальтовые магниты) с полюсными наконечниками 3. Полюсные наконечники имеют сечение гиперболы, размещены так, что одноименные полюса лежат в противолежащих квадратах. В центре магнитной системы с возможностью отклонения от него (например, на растяжке или подвесе) укреплена инерционная масса 4, выполненная из диамагнитного материала (висмут, медь и др.). С инерционной массой жестко связаны два взаимоперпендикулярных датчика Холла 5 и 6, установленных так, что их пластины размещены под углом 45 к осям постоянных магнитов.
Датчик ускорения работает следующим образом
СП
О СО
J
KD
4Ь
315
Инерционная масса 4 с пластинами датчиков Холла,5 и 6 под действием сил инерции пропорциональных ускорению отклоняется в любом направлении на плоскости X-Y (фиг.1), При этом значения выходных сигналов датчиков Холла U, ,U г изменяются на величины, пропорциональные Hrsin Ц и Hrcoatf,
где Н - напряженность магнитного по
ля в точке расположения датчиков ,Холла; ср - угол, составляемый векто- ром ускорения с осью X.
Отклонение инерционной массы от положения равновесия происходит до тех пор, пока инерционная сила, действующая на нее, не уравновесится пондеромоторной силой, действующей на диамагнитное поле, помещенное в ноднородном магнитном полео
Величина пондеромоторной силы определяется по формуле . Hj.. grad4r, где m - масса тела;
х - магнитная восприимчивость. Направление силы зависит от знака магнитной восприимчивости вещества, из которого изготовлена инерционная масса- 4. Для диамагнитных тел магнитная восприимчивость отрицательна и такие тела выталкиваются из области поля с большей напряженностью. Учитывая, что для-используемой магнитной системы напряженность магнитного поля выражается формулой
Н
г Н.г,
где Нв - напряженность магнитного поля на полюсном наконечнике j
г - радиус-вектор системы. Учитывая, что градиент напряженности магнитного поля величина постоянная, можно записать:
F m-x-gradH-Hor,
т.е. чем больше отклонение инерционной массы 4 от оси симметрии, тем
0
5
0
5
0
5
больше уравновешивающая пондеромотор- ная сила, действующая на нее. Таким образом, при снятии ускорения инерционная масса возвращается в исходное состояние.
В предлагаемом датчике не требуется производить специальной начальной юстировки, т.е. установления инерционной массы 4 и связанных с ней магниточувствительнмх элементов 5 и 6 в определенную точку поля, поскольку инерционная масса, выталкиваясь из любой области поля с напряженностью не равной нулю, самопроизвольно устанавливается по оси магнитной системы, где . Таким образом, исключается погрешность, связанная с ошибкой начальной установки и ошибкой последующего воспроизводства начальной точки отсчета, за счет чего повышается точность измерения.
Величина измеряемого ускорения пропорциональна напряженности магнитного поля в точке расположения датчиков Холла. Сопоставительный анализ выходных ЭДС датчиков Холла с учетом их знаков позволяет определить величину ускорения, а также его напряжение. В качестве примера рассмотрена следующая схема обработки сигнала (фиг.2).
На входы 7 и 8 датчиков Холла 5 и 6 последовательно подается постоянный ток от источника 9 стабилизрован- ного тока. Далее используются две параллельные схемы обработки выходных сигналов. Первая включает два аналогичных умножителя 10 и 11, на входы которых подаются ЭДС Холла, последовательно соединенные сумматор 12, ло- гарифматор 13, делитель 14, обратный логарифматор 15 и индикатор 16. Блок последовательно осуществляет следующие операции:

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ ВЕЩЕСТВА | 2018 |
|
RU2680863C1 |
| ПОПЛАВКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1973 |
|
SU1839860A1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОЙ ВОСПРИИМЧИВОСТИ ОКСИДНЫХ КОМПОЗИЦИЙ И СОЛЕЙ В ЖИДКОЙ И ТВЕРДОЙ ФАЗАХ | 1998 |
|
RU2134417C1 |
| Способ магнитно-реологической диагностики магнитной восприимчивости частицы при ее магнитоуправляемом перемещении в жидкости | 2023 |
|
RU2805765C1 |
| Способ магнитно-реологического контроля магнитной восприимчивости частицы | 2020 |
|
RU2753159C1 |
| МАНОМЕТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ И ВОСПРОИЗВЕДЕНИЯ МАЛЫХ ДАВЛЕНИЙ ПОРШНЕВОЙ ПАРОЙ, ОБРАЗОВАННОЙ СТРУКТУРНО-СОПРЯЖЕННЫМИ МАГНЕТИКАМИ (ВАРИАНТЫ) | 2011 |
|
RU2489692C1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |
| Магнитно-реологический способ определения магнитной восприимчивости частицы | 2023 |
|
RU2813499C1 |
| Способ калибровки рычажных магнитных весов и эталонный образец для его осуществления | 1987 |
|
SU1499295A1 |
| Маятниковый компенсационный акселерометр | 1972 |
|
SU1839838A1 |
Изобретение относится к измерительной технике. Самоюстирующийся датчик ускорения позволяет определить величину и направление ускорения путем измерения знака и величины выходного напряжения двух датчиков Холла, связанных с инерционной массой, размещенной в неоднородном магнитном поле. Для этого инерционная масса 4 выполнена из диамагнитного материала и размещена с возможностью отклонения от оси симметрии магнитной системы. Магнитная система, жестко связанная с корпусом 1, состоит из четырех постоянных магнитов 2 с полюсными наконечниками 3 гиперболического профиля и образуют магнитный квадруполь. Пластины двух взаимно перпендикулярных датчиков Холла 5, 6 связаны с инерционной массой и расположены параллельно оси симметрии магнитной системы. 2 ил.
U, .sinV b 7g / pCHw -
U2 -cHrcos - c., j
HCH ZlnHj.,
В результате индикатор фиксирует величину, пропорциональную напряженности магнитного поля, т.е. величину, прямой пропорциональную определяемому ускорению. Вторая, параллельная первой, схема обработки сигнала включает два индикатора 17 и 18, фиксирующих величину и знак выходных ЭДС
датчиков Холла, делитель 19 и аналоговый блок 20 и осуществляет следующие преобразования:
ypH,l±ypHrsinif
9 JpHj- fyf Hrcosi/
&
tgi/
Неопределенность, связанная с неопределенностью tg p (/три изменении Ч 0-360 - (/+fJ)J, исключается при учете знаков выходных сигналов, так как в первом квадранте значения U, и U положительные, во втором - U положительное, U2 отрицательное, в третьем - U, и U отрицательные, в четвертом - U, отрицательное, U положительное. Следовательно, одновременная регистрация величин +Н sirMp, ±Hrcos if и их обработка позволяют однозначно определить значение и направление измеряемого ускорения. При этом за начало отсчета должно быть выбрано направление, перпендикулярное оси симметрии магнитной системы в плоскости расположения одного из датчиков Холла, поскольку при перемещении в заданном направлении (х) значения Hrcosif Hr, а HpSiiupO.
Формула изобретения
Двухкомпонентный датчик ускорения, содержащий корпус, инерционную массу на подвесе и преобразователь перемещения, отличающийся тем, что, с целью повышения точности измерений, преобразователь перемещений
выполнен в виде магнитной системы из четырех постоянных магнитов с полюсными наконечниками, размещенных на корпусе и образующих магнитный квад- руполь и двух взаимоперпендикулярных
5 датчиков Холла, установленных на инерционной массе, размещенной в центре квадруполя, причем полюсные наконечники выполнены гиперболического профиля, инерционная масса - из
0 диамагнитного материала, а пластины датчика Холла размещены под углом 45 к осям постоянных магнитов.
аг.1
20
Фиг.1
| 0 |
|
SU344358A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ адаптивного управления производством технически сложного изделия вдоль жизненного цикла | 2019 |
|
RU2709156C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
