Предлагаемое изобретение относится к области измерительной техники и может быть использовано в качестве прецизионного датчика линейных ускорений в системах навигации.
Известны поплавковые компенсационные акселерометры, содержащие корпус, подвижную часть, установленную в опорах, датчик угла, магнитоэлектрический датчик момента, состоящий из постоянного магнита с ярмом и рамки с обмоткой, жестко связанной с подвижной частью и расположенной в зазоре между магнитом и ярмом.
Недостатком известного устройства является наличие паразитных магнитных тяжений подвижной части акселерометра магнитным полем магнитной системы датчика момента.
Целью предлагаемого изобретения является повышение точности акселерометра путем компенсации магнитных тяжений подвижной части акселерометра.
Сущность предлагаемого изобретения состоит в том, что на корпусе акселерометра дополнительно установлена подвижная относительно оси подвеса магнитная система, выполненная в виде магнитопровода с регулируемым и профилированным рабочим зазорами, постоянного магнита, штока и компенсационного элемента, причем в регулируемом зазоре помещен шток из магнитного материала, а в рабочем зазоре - компенсационный элемент. Профиль поверхностей магнитопровода в рабочем зазоре выполнен в виде кривой, знак кривизны которой соответствует знаку разности между средней магнитной восприимчивостью рамки магнитоэлектрического датчика момента и магнитной восприимчивостью заливочной жидкости, а компенсационный элемент закреплен на подвижной части и выполнен из материала, знак магнитной восприимчивости которого противоположен знаку кривизны профиля.
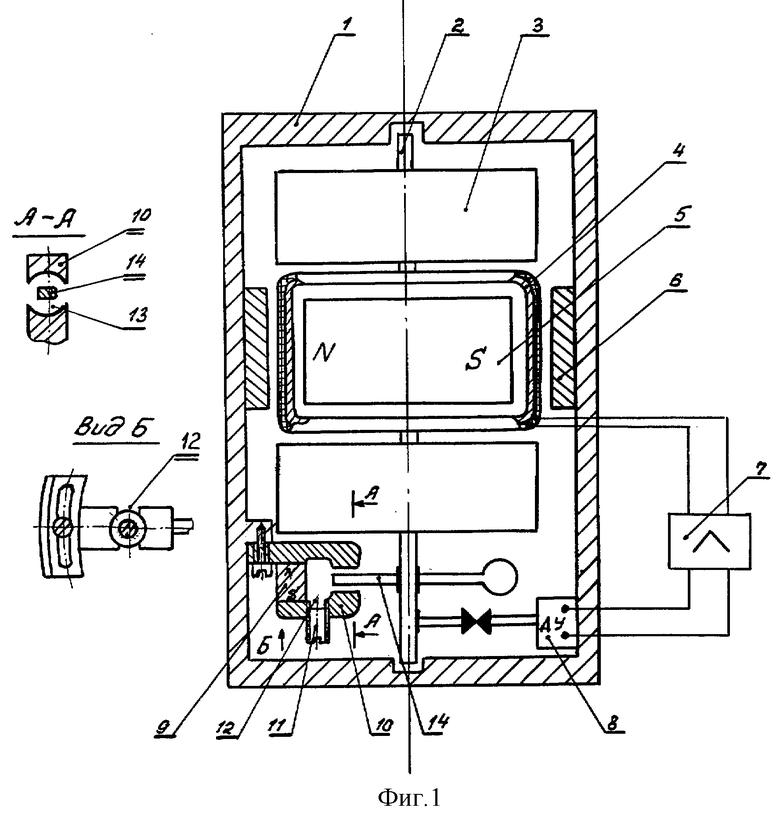
Схема поплавкового компенсационного акселерометра приведена на фиг.1, где
1 - герметичный корпус;
2 - опоры (подвес);
3 - подвижная часть с поплавком и маятником;
4 - рамка с обмоткой датчика момента;
5 - постоянный цилиндрический магнит датчика момента;
6 - ярмо датчика момента;
7 - усилитель обратной связи;
8 - датчик угла;
9 - постоянный магнит дополнительной магнитной системы;
10 - магнитопровод дополнительной магнитной системы;
11 - подвижный шток;
12 - регулируемый зазор;
13 - профилированный рабочий зазор;
14 - компенсационный элемент.
Акселерометр содержит подвижную часть 3 с поплавками и маятником, установленную в опорах 2 и взвешенную в жидкости, которой заполнен герметичный корпус 1, датчик угла 8 поворота подвижной части относительно корпуса, магнитоэлектрический датчик момента, состоящий из постоянного цилиндрического магнита 5 и кольцевого ярма 6, в зазоре между которыми расположена рамка 4 с обмоткой датчика момента, закрепленная на подвижной части. Выход датчика угла подключен ко входу усилителя обратной связи 7. Выход усилителя соединен с обмоткой датчика момента. На внутренней стороне корпуса размещена дополнительная магнитная система, состоящая из постоянного магнита 9 и магнитопровода 10 с регулируемым и рабочим зазорами, В регулируемом зазоре 12 помещен шток 11 из магнитного материала, положение которого в магнитопроводе фиксируется резьбовым соединением, а по окончании регулировки - контрящей краской. В рабочем зазоре 13 размещен элемент компенсации 14, закрепленный на подвижной части 3 акселерометра. Торцевые части магнитопровода 10, образующие рабочий зазор, профилированы с целью создания неравномерного магнитного поля в последнем. Дополнительная магнитная система установлена в корпусе на цилиндрическое посадочное место, ось которого совпадает с осью вращения подвижной части акселерометра, что ограничивает перемещения магнитной системы и позволяет ей поворачиваться строго вокруг оси вращения подвижной части. Фиксация положения магнитной системы на корпусе осуществляется винтами.
При действии ускорения маятник на подвижной части акселерометра создает момент, под действием которого подвижная часть поворачивается относительно корпуса. Этот поворот регистрирует датчик угла, сигнал с которого поступает на усилитель, усиливается и подается в обмотку датчика момента. При взаимодействии тока в обмотке с магнитным полем датчика момента к подвижной части акселерометра прикладывается момент, компенсирующий момент от действующего ускорения. Установившееся значение тока в обмотке датчика момента пропорционально действующему ускорению и является выходной величиной акселерометра.
Наличие вредных моментов, в том числе и паразитных магнитных тяжений, приводит к появлению ложных сигналов на выходе акселерометра, то есть снижает его точность.
Устранения вредных моментов, в основном момента паразитных магнитных тяжений, добиваются регулировкой положения подвижной магнитной системы относительно корпуса 1 и штока 11 относительно магнитопровода 10 с последующей фиксацией подвижной магнитной системы и штока.
Паразитным магнитным тяжениям подвергаются элементы подвижной части акселерометра, находящиеся в зазоре магнитной системы датчика момента, то есть рамка с обмоткой датчика момента.
Вне зазора магнитное поле резко ослабевает и при отсутствии деталей из магнитного материала на подвижной части не вызывает тяжений последней.
Магнитные тяжения рамки датчика момента вызваны пара- или диамагнитным эффектами, имеющими место в неравномерном магнитном поле, то есть втягиванием парамагнитных тел в область более интенсивного магнитного поля или выталкивание диамагнитных тел из области сильного магнитного поля.
Цилиндрический магнит датчика момента в кольцевом ярме создает косинусоидальное магнитное поле в зазоре, то есть
где Н - напряженность магнитного поля;
Н0 - амплитудное значение напряженности магнитного поля;
ϕ - угловая координата.
Такое распределение магнитного поля позволяет устранить некоторые методические погрешности акселерометра, однако оно является причиной магнитных тяжений.
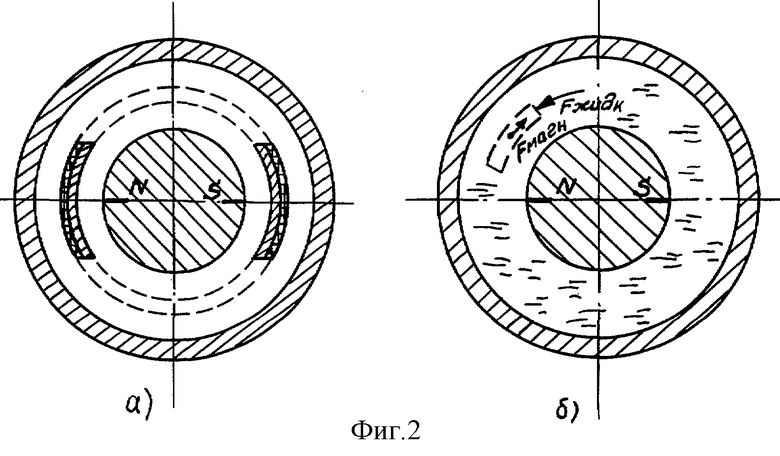
На рамку датчика момента, выполненную в виде усеченного тонкостенного цилиндра (фиг.2а) и состоящую из каркаса с обмоткой, при условии однородности материала и симметрии рамки действует момент магнитных тяжений
где æк - объемная магнитная восприимчивость материала каркаса;
æобм - объемная магнитная восприимчивость материала обмотки;
hк - толщина каркаса;
hобм - толщина обмотки;
R - средний радиус рамки;
l - высота части рамки, находящейся в зазоре магнитной системы датчика момента;
ϕр - угловая ширина рамки;
H0 - амплитудное значение напряженности магнитного поля в зазоре;
ϕ - угол отклонения плоскости симметрии рамки от плоскости максимальной напряженности магнитного поля в зазоре (то есть линии полюсов магнита датчика момента).
Как правило, æк·hк≫æобм·hобм, то есть
Так как толщина обмотки датчика момента обычно мала по сравнению с толщиной каркаса, то
где hр - толщина всей рамки,
Жидкости, как и твердые тела, обладают определенными магнитными свойствами, то есть заливочная жидкость является либо диамагнитной, либо парамагнитной.
Это вызывает дополнительные магнитные тяжения, механизм возникновения, которых может быть пояснен следующим образом.
На выделенный объем жидкости (фиг.2б), например, диамагнитной, со стороны неравномерного магнитного поля действует сила Fмагн, стремящаяся вытолкнуть его из области сильного магнитного поля. Однако в силу замкнутости системы ″магнитное поле - жидкость″ выделенный объем жидкости неподвижен вследствие того, что силовое воздействие магнитного поля компенсируется разностью давлений соседних слоев жидкости. Таким образом на выделенный объем жидкости со стороны окружающей жидкости действует усилие Fжидк, стремящееся втянуть этот объем в область более сильного магнитного поля. Если объем жидкости заменить твердым телом, то на него будет действовать такая же сила со стороны окружающей жидкости, как и на рассмотренный объем жидкости. Например, диамагнитная жидкость будет способствовать втягиванию находящегося в ней твердого тела в область интенсивного магнитного поля, то есть усиливать парамагнетизм твердого тела, а парамагнитная жидкость - усиливать диамагнетизм твердого тела, находящегося в ней.
На рамку моментного датчика со стороны жидкости в зазоре магнитной системы датчика момента действует момент Мж
где æж - объемная магнитная восприимчивость жидкости.
На рамку действует суммарный момент тяжений, равный:
или
где Кт - крутизна момента магнитных тяжений
Уравнение (8) было получено для симметричной рамки. Для несимметричной рамки под углом ϕ=0 следует понимать такое положение рамки, при котором потокосцепление магнитного поля постоянного магнита датчика момента и магнитного поля, создаваемого током, протекающим в обмотке рамки, максимально. В этом положении (назовем его нейтральным) нелинейность выходной характеристики акселерометра минимальна (равна нулю).
Таким образом для несимметричной рамки уравнение (8) принимает вид:
где угол ϕ0 обусловлен смещением центра обмотки относительно плоскости симметрии каркаса, а также собственной несимметрией каркаса рамки и обмотки.
Наличие угла ϕ0 затрудняет регулировку прибора, так как уменьшение нелинейности связано с увеличением момента тяжений и наоборот.
Это противоречие устраняется введением в конструкцию акселерометра дополнительной миниатюрной магнитной системы, расположенной на корпусе и состоящей из постоянного магнита и магнитопровода с зазором, в котором за счет профилирования поверхностей магнитопровода создается неравномерное магнитное поле, и компенсационного элемента, например, в виде тонкого стержня из неферромагнитного материала, закрепленного на подвижной части акселерометра и расположенного в зазоре дополнительной магнитной системы.
На компенсационный элемент со стороны неравномерного магнитного поля в зазоре дополнительной системы действует сила

где F - сила, действующая на компенсационный элемент;
æкомп - эффективная объемная магнитная восприимчивость компенсационного элемента, æкомп=æэ-æж, где æэи æж - значения объемной магнитной восприимчивости соответственно материала компенсационного элемента и заливочной жидкости;
Vкомп - объем компенсационного элемента;
Нкомп - напряженность магнитного поля в зазоре дополнительной магнитной системы;
 - градиент напряженности магнитного поля вдоль зазора.
- градиент напряженности магнитного поля вдоль зазора.
К подвижной части прикладывается сила F и момент Мкомп:

где Rкомп - расстояние от оси подвижной части до зазора дополнительной магнитной системы.
Сила F компенсируется реакцией в опорах. При введении в конструкцию 2-х симметричных магнитных систем и компенсационных элементов к подвижной части прикладывается только момент М'комп=2Мкомп.
Так как dS=Rкомп·dϕ,
где dϕ - элементарный угол поворота относительно оси подвижной части акселерометра,
то 
Если поверхности магнитопровода, образующие рабочий зазор дополнительной магнитной системы, выполнить в виде цилиндрических поверхностей, то
где Кпр - коэффициент, пропорциональный крутизне профиля;
Н0комп - амплитудное значение напряженности магнитного поля.
При повороте дополнительной магнитной системы в корпусе вокруг оси подвижной части акселерометра на угол ϕкомп относительно нейтрального положения подвижной части акселерометра уравнение (13) принимает вид:
Мкомп=æкомп·Vкомп·Кпр·H2 0комп·ϕ+æкомп·Vкомп·Кпр·H2 0комп·ϕкомп (14)
или
где ϕ - угол отклонения подвижной части акселерометра от нейтрального положения.
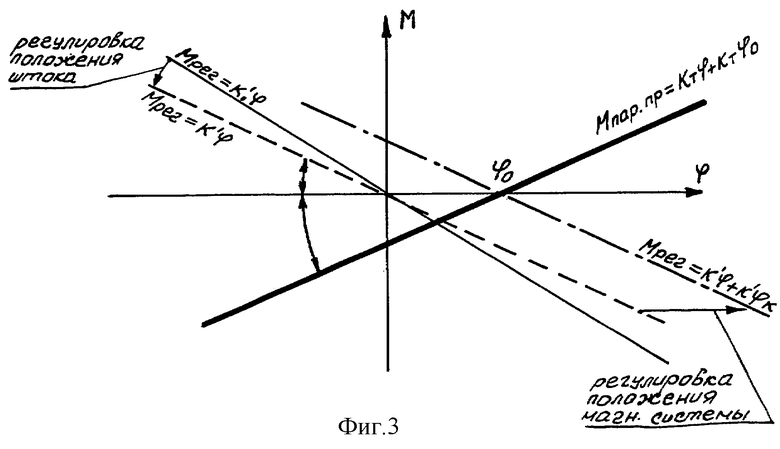
Так как крутизна магнитных тяжений Кт (уравнение (9) является постоянной величиной для приборов одной конструкции, то расчетом соответствующих параметров компенсационной системы (дополнительной магнитной системы и компенсационного элемента, то есть величин æкомп, Н0комп, Кпр, Vкомп) для приборов одной конструкции можно обеспечить Кт=-К', а при регулировке каждого отдельного прибора, заключающейся в повороте дополнительной магнитной системы на угол ϕкомп и фиксации ее в этом положении, можно добиться выполнения равенства ϕкомп=ϕ0, то есть осуществить практически полную компенсацию магнитных тяжений (фиг.3), при которой Мкомп=-Мт.
Эта компенсация осуществляется при нейтральном положении рамки, то есть одновременно достигается минимальная величина нелинейности и устраняется момент магнитных тяжений. При этом момент тяжений практически устраняется при любых малых отклонениях подвижной части от нейтрального положения, то есть дополнительно исключаются погрешности, связанные с дрейфом датчика угла, статизмом системы и т.д.
Величины кривизны Кт магнитных тяжений незначительно колеблются у отдельных приборов одинаковой конструкции в пределах соответствующих допусков (например, из-за колебаний размеров рамки в пределах соответствующих допусков), кроме магнитных тяжений существует ряд дополнительных паразитных воздействий на подвижную часть акселерометра, например, упругие тяжения токоподводов, поэтому величину Кт тоже целесообразно регулировать. Требование к регулировке Кт - неизбежность ранее отрегулированных параметров. Это требование можно выполнить регулировкой напряженности магнитного поля в зазоре дополнительной магнитной системы. Для этой цели в магнитопроводе выполнен регулируемый зазор, в котором размещен шток из магнитного материала.
При перемещении штока меняется проводимость магнитопровода, что приводит к изменению напряженности магнитного поля в зазоре, причем характер распределения поля в зазоре остается прежним, так как не меняется форма зазора.
Для расширения диапазона регулировки желательно увеличивать крутизну момента компенсации. При большой крутизне момента компенсации паразитные тяжения могут быть полностью устранены даже у приборов, в настоящее время бракующихся из-за повышенных паразитных тяжений, обусловленных, например, феррозагрязнениями подвижной части.
Меры по увеличению крутизны компенсационного момента могут быть рассмотрены на примере акселерометра, залитого кремниево-органической диамагнитной жидкостью, подвижную часть которого можно считать алюминиевой, то есть парамагнитной, так как из алюминия выполнен каркас рамки датчика момента, который, в основном, и испытывает тяжения.
Для парамагнитной подвижной части нейтральное положение является устойчивым в отношении магнитных тяжений, то есть при отклонении подвижной части от нейтрального положения силы со стороны магнитного поля стремятся вернуть ее обратно.
Диамагнитная жидкость, как было показано выше, еще больше увеличивает устойчивость подвижной части в нейтральном положении, то есть Кт=К+Кж>0, так как æж<0, æр>0.
Задача компенсационной системы заключается в том, чтобы сделать нейтральное положение подвижной части безразличным, то есть в рассматриваемом случае система компенсации должна обеспечивать неустойчивость подвижной части в нейтральном положении, то есть должны выполняться условия:
К'<0
|К'|>Кт
Если профиль полюсов магнитопровода магнитной системы компенсации выполнен в виде, выпуклых (в сторону зазора) поверхностей, то есть поверхностей с отрицательной кривизной, то магнитное поле в зазоре компенсационной системы имеет такой же характер, как и поле датчика момента (нейтральному положению подвижной части соответствует наиболее интенсивное магнитное поле). В этом случае для обеспечения отрицательной крутизны момента компенсации, компенсационный стержень должен быть выполнен из сильного диамагнетика.
Диамагнитная жидкость, воздействуя на стержень, создает вредный момент, усиливающий паразитные тяжения. Следовательно, при увеличении объема стержня, напряженности магнитного поля и крутизны профиля магнитопровода, будет увеличиваться не только компенсационный момент, но и вредный, то есть подобные меры по увеличению крутизны момента компенсации являются малоэффективными.
Устранить это противоречие может профилирование зазора в виде вогнутых поверхностей (поверхностей с положительной кривизной), то есть создание в центре зазора ослабленного поля. При этом силовое воздействие диамагнитной жидкости на стержень становится противоположным - жидкость выталкивает элемент из центра зазора, то есть вредное влияние жидкости заменяется полезным. Стержень (компенсационный элемент) при этом должен быть выполнен из парамагнитного материала, например, из хрома или алюминия (в последнем случае обеспечивается однородность материала подвижной части, облегчается крепление элемента - возможна сварка и т.д.).
В общем случае диапазон регулирования акселерометра по паразитному моменту можно расширить, если профиль поверхностей магнитопровода, образующих рабочий зазор, выполнить в виде кривой, знак кривизны которой соответствует знаку разности между средней магнитной восприимчивостью подвижной части акселерометра и магнитной восприимчивостью заливочной жидкости, а компенсационный элемент выполнить из материала, знак магнитной восприимчивости которого противоположен знаку кривизны профиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Маятниковый компенсационный акселерометр | 1972 |
|
SU1839838A1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1975 |
|
SU1840663A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| СПОСОБ РЕГУЛИРОВКИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1980 |
|
SU1840724A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ КРУТИЗНЫ ХАРАКТЕРИСТИКИ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2028001C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
SU1760861A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2003 |
|
RU2242011C2 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1978 |
|
SU1839858A1 |
Изобретение относится к области измерительной техники и может быть использовано в качестве прецизионного датчика линейных ускорений в системах навигации. Сущность: акселерометр содержит корпус с камерой, залитой жидкостью с магнитной восприимчивостью. В камере расположена подвижная система. Кроме того, акселерометр содержит датчик угла, датчик момента с подвижной рамкой, связанные через усилитель и компенсатор моментов магнитного выталкивания рамки в жидкости с дополнительной магнитной системой. При этом компенсатор моментов магнитного выталкивания рамки в жидкости выполнен в виде элемента компенсации, установленного на неподвижной системе, и расположен в неравномерном зазоре дополнительной магнитной системы. Форма зазора выполнена с учетом величин и знаков магнитной восприимчивости жидкости, рамки датчика момента и элемента компенсации. Кроме того, дополнительная магнитная система может быть выполнена в виде двух параллельных намагниченных вдоль оси стержневых магнитов, а элемент компенсации располагаться между ними. Элемент компенсации может быть выполнен также в виде ступенчатого цилиндра, ось которого перпендикулярна осям стержневых магнитов дополнительной магнитной системы. Технический результат: увеличение точности, уменьшение паразитных моментов, снижение чувствительности к осевым люфтам. 3 ил.