Изобретение относится к средствам автоматизации погрузочно-разгрузочных работ и может быть использовано в качестве захватного органа промышленных роботов или манипуляторов для- легкой промышленности.
Цель изобретения - повышение надежности работы устройства и расширение его технологических возможностей.
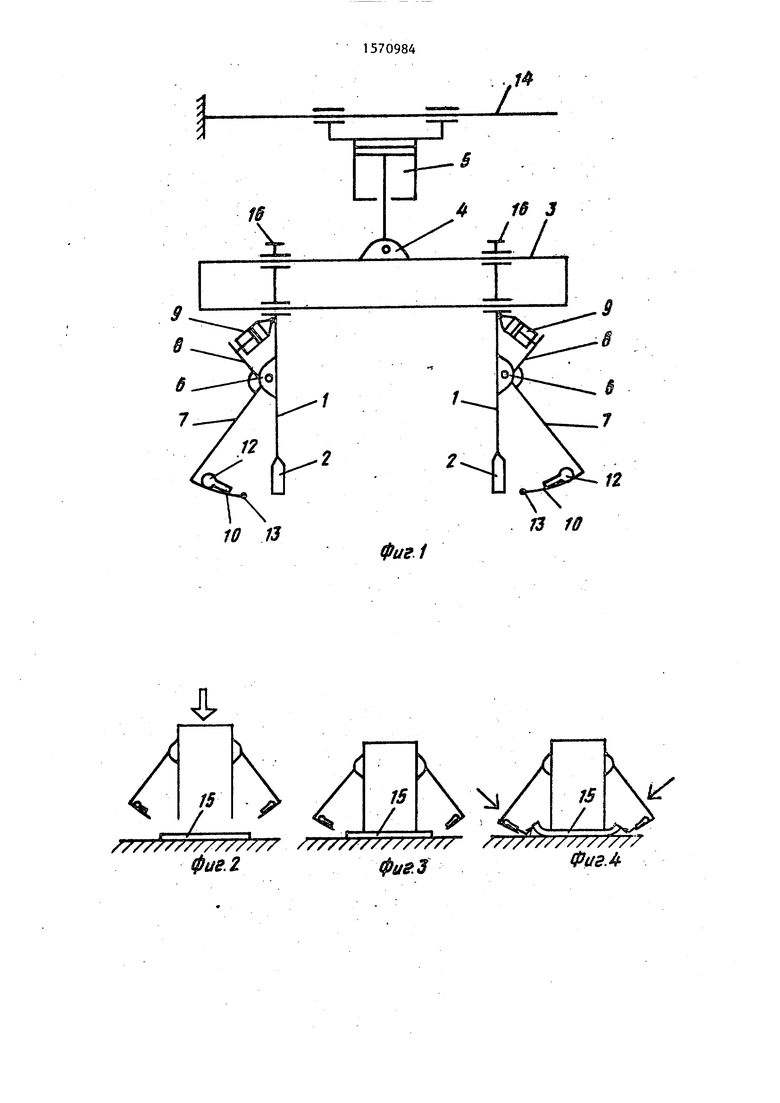
На фиг. 1 показана принципиальная схема устройства; на фиг. 2-5 - положение устройства при работе на фиг. 6 - рабочий участок зажима.
Устройство содержит раму 1, выполненную в виде двух параллельных раздвижных одна относительно другой планок 2, установленных на горизонтальной направляющей 3, которая с помощью шарнира 4 соединена с механизмом 5 подъема. На опорной раме 1 с наружной ее стороны с помощью шарниров 6 установлены зажимы 7, выполненные в виде рычагов 8, соединенных с индивидуальными приводными элементами 9, например пневмоцилиндрами. Рабочие участки 10 зажимов 7 выполнены с прорезями И, в которых размешены пневмосопла 12, обращенные в сторону опорных планок 2. Концевые части 13 рабочих участков 10 зажимов 7 обтянуты эластичным материалом, например резиной.
Предлагаемое устройство подвешено на горизонтальной траверсе 14, по коСЛ
со
00 Ј
торой оно перемещается при транспортировке захватываемых деталей 15 с одного рабочего места на другое (привод не показан). Регулировка устройства по размерам деталей 15 осуществляется с помощью винтов 1 б.
Устройство работает следующим образом.
В ИСХОДНОМ ПОЛОЖеНИИ (фИГ . 1 И 2)
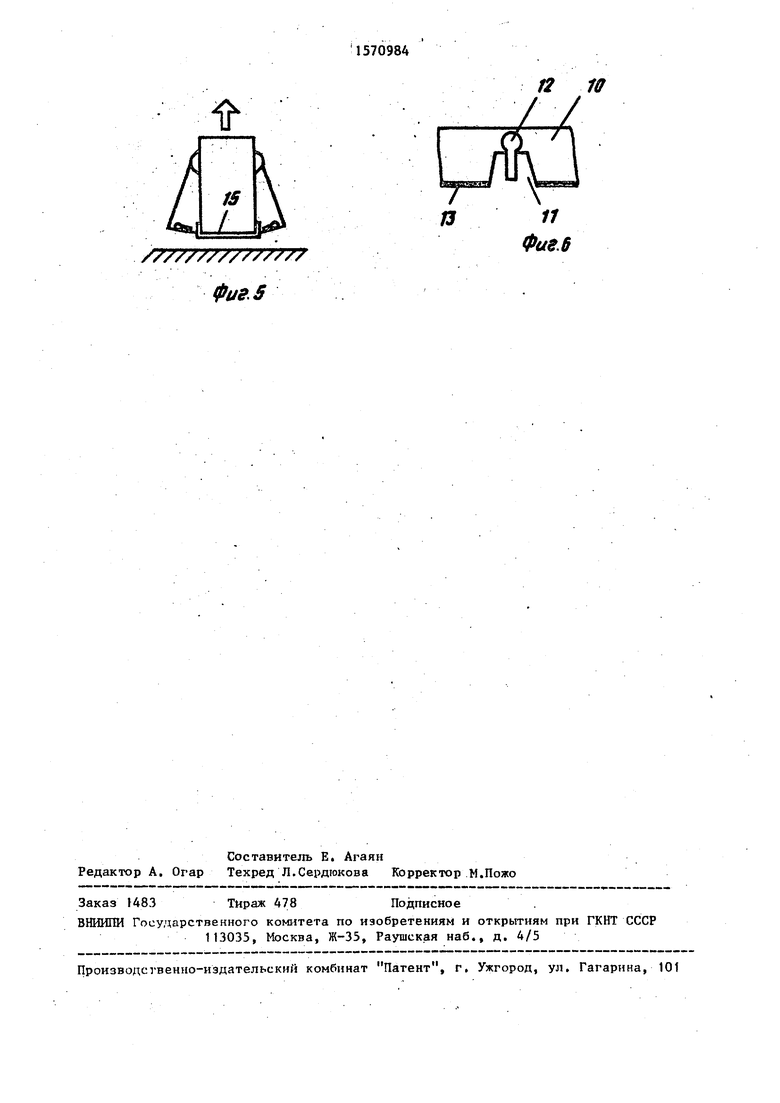
устройство находится над захватываемой деталью 15 (лежащей, например, на стопе или на ленте конвейера). При пуске устройства оно с помощью цилиндра механизма 5 подъема перемещается вниз до образования жесткой опоры меж ду планками 2 и деталью 15 (фиг. 3). Затем в сопла 12 подается сжатый воздух (фиг. 4). Выходящая из сопл 12 воздушная струя, отражаясь от поверх- ности стола или конвейера, приподнимает свободный край детали 15 (лежащей за пределами планок 2). Одноврв- :менно зажимы 7 посредством индивидуальных пневмоприводов 9 и рычагов 8 поворачиваются вокруг шарниров 6 и рабочие участки 10, приближаясь к планкам 2, прочно прижимают края детали 15 к наружным стенкам планок 2 (фиг. 4). Затем устройство перемеща- ется вверх (фиг. 5) и переносит деталь 15 в нужном направлении. Для точ ного направления воздушной струи сопла 1 2 к краю детали 15 оно размещено в прорези 11 рабочего участка 10 за- жима 7. Для прочного прижатия детали 15 к опорным планкам 2 концевые части 13 рабочих участков 10 зажимов 7 обтянуты мягким эластичным материалом например резиной, которая одновремен- но выполняет функцию амортизатора, сглаживающего удары зажимов 7 о поверхность опорных планок 2 (фиг. 6). При переходе от одних размеров деталей 15 к другим опорные планки 2 сме- щаются относительно направляющей 3 после ослабления крепежных винтов 16. Шарнир 4 обеспечивает самопроизвольную балансировку устройства над деталью 1 5,.
Предлагаемое техническое решение обеспечивает повышение надежности захвата, точности позиционирования де
$
0
тали и расширение-технологических возможностей устройства за счет того, что натянутая на опорную раму деталь может быть вместе с жесткой опорной рамой точно уложена в новой рабочей позиции. Кроме того, выполнение на рабочих участках зажимов выемок с установленными в них соплами, обращен- ньми в сторону опорных планок обеспечивает точность ориентации струи воздуха к краю захватываемой детали и, следовательно, надежность захвата, а загиб детали на 90е обеспечивает ее надежное удержание. Надежность захвата обеспечивается также тем, что концевые части зажимов обтянуты эластичным материалом, например, резиной.
Формула изобретения
1.Устройство для захвата и транспортировки мягких плоских деталей, преимущественно из текстильного материала, содержащее раму с двумя вертикально расположенными опорными эле ментами и смонтированные у одного из опорных элементов сопло, направленное в сторону опорного элемента, и зажим для крепления края захватываемой детали, включающий рычаг, закрепленный на наружной стороне соответствующего опорного элемента с возможностью контакта с ним, и привод поворота рычага, отличающееся тем, что, с целью повышения надежности работы, оно дополнительно имеет размещенные у другого опорного элемента С9пло и зажим для крепления края захватываемой детали, установленные аналогично первым, каждый опорный элемент выполнен в виде горизонтальной планки, а каждый рычаг контактирует с боковой наружной поверхностью опорного элемента и его рабочая поверхность выполнена из эластичного материала с прорезями для установки в них соответствующих сопл.
2.Устройство- по п. 1, отличающееся тем, что, с целью расширения технологических возможностей, рама выполнена в виде двух па- раллельшгпс раздвижных одна относи- тельно другой планок.
«а а «е
$
чн
h
Vtis.
-з- со о о г, ш
H
л
« «5 С «
И
-.«М
I
ч
Я
$ §
Г
ft
:
I.
Г
«ч
«
§
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальное устройство для ориентирования и фиксации трубчатых элементов | 1990 |
|
SU1733166A1 |
| Машина для смены доменных фурм | 1935 |
|
SU48395A1 |
| СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО С ПРОФИЛЬНОЙ ПЛАНКОЙ И СКОЛЬЗЯЩИМ НЕСУЩИМ УЗЛОМ ДЛЯ ПОДВИЖНЫХ ЭЛЕМЕНТОВ ПРЕДМЕТА МЕБЕЛИ | 2006 |
|
RU2386772C2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ НА БОРТОВОЕ КОЛЬЦО ШИНЫ И СПОСОБ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ | 1997 |
|
RU2177879C2 |
| Устройство для получения деталей одежды, выкраиваемых из полотна материала | 1990 |
|
SU1837818A3 |
| Устройство для открывания полиэтиленовых мешков | 1980 |
|
SU948776A1 |
| ЗАХВАТ ДЛЯ МЕШКОВ | 1990 |
|
RU2021197C1 |
| БЫТОВОЙ ПРИБОР С УСТРОЙСТВОМ КРЕПЛЕНИЯ ЭЛЕКТРОМОТОРА | 2005 |
|
RU2373824C2 |
| Способ растягивания и складывания симметричной детали швейных изделий из мягкого куска ткани для подачи его в рабочую зону швейной машины и устройство для его осуществления | 1988 |
|
SU1634130A3 |
| УСТРОЙСТВО ДЛЯ ПЕРЕНОСА БОБИН | 1998 |
|
RU2204520C2 |
Изобретение относится к средствам автоматизации погрузочно-разгрузочных работ, в частности к устройствам для захвата и транспортировки мягких плоских деталей, преимущественно из текстильных материалов, и позволяет повысить надежность работы, расширяет технологические возможности устройства. В устройстве опорная рама выполнена в виде параллельных раздвижных относительно друг друга планок, установленных на горизонтальной направляющей, шарнирно соединенной с механизмом подъема, а зажимы для крепления захватываемой детали выполнены в виде рычагов, шарнирно установленных на наружных сторонах опорных планок совместно с индивидуальными приводными элементами, например пневмоцилиндрами, причем на рабочих участках зажимов выполнены выемки и установлены в них сопла, обращенные в сторону опорных планок, а концевые части зажимов обтянуты эластичным материалом, например резиной. 1 з.п. ф-лы, 6 ил.
Фи&5
| Акцептованная заявка ФРГ № 3147818, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
