Изобретение относится к сельскохозяйственному машиностроению и ноже т быть применено в косилке с ротаг ционным режущим аппаратом.
Цель изобретения - повышение надежности работы.
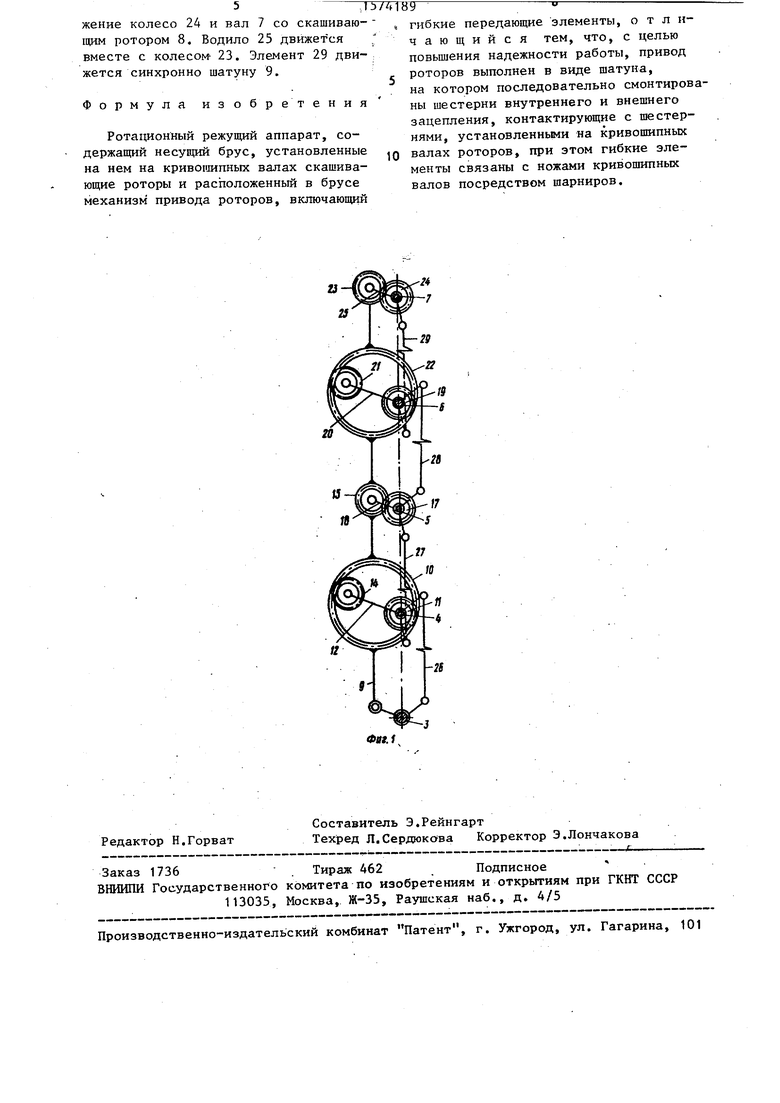
На фиг. 1 показана кинематическая схема привода, вид сверху; на фиг.2 - то же, вид сбоку.
Ротационный режущий аппарат состоит -щ несущего бруса 14 в котором посредством кинематических соединений 2 установлены ведущий вад 3 и ведомые валы 4-7, несущие скашивающие роторы 8 с ножами (не показаны)
Валы 3 т 7 выполнены кривошипными,, Шатун 9, на котором смонтированы зубчатые колеса зубчато-рычажных передач посредством кинематического соединения 2, присоединяется к ведущему валу 3. Зубчатое колесо 10, установленное на шатуне 9, входит в за- цепление с центральным колесом 11, установленным на валу 4. Водило 12 посредством кинематического соединения 13 установлено на валу 4. Сателлит 14, входящий в зацепление с зубчатым колесом 10,установлен на . Водиле 12 посредством кинематического соединения 2.
Зубчатое колесо 15, установленное на шатуне 9 посредством крон- Штейна 16, входит в зацепление с колесом 17, установленным на валу 5, водило 18 посредством кинематического соединения 13 присоединяется к валу 3 и посредством кинематического соединения 2 - к колесу 15.
Зубчатое колесо с внутренними Зубьями, установленное на шануте 9, ехбдит в зацепление с центральным Колесом 19, установленным на валу б. Водило 20 посредством кинематического соединения 13 установлено на валу 6. Сателлит 21, входящий в зацепление с зубчатым колесом 22, установлен на водиле 20 посредством кинематического соединения 2.
Зубчатое колесо 23, установленное на шатуне 9, входит в. зацепление с колесом 24, установленным на валу 6. Водило 25 посредством кинематического соединения 13 присоединяется к валу 7 и посредством кинематического соединения 2 - к колесу 2.3.
Гибкий передающий элемент 26, присоединенный к валам 3 и 4, образует параллелограммный механизм
(механизм параллельных кривошипов) с гибким звеном. Этот механизм располагается в плоскости параллельной плоскости расположения зубчато-рычажного механизма, состоящего из колес 10 и 11. Оба механизма вращаются одновременно, чем обеспечивается синхронность вращения валов 3 и 4. Гибкий передающий элемент 27 образует механизм параллельных кривошипов между валами 4 и 5.
Гибкий передающий элемент образует механизм параллельных кривошипов
5 между валами 5 и 6. Гибкий передающий элемент 29 образует механизм параллельных кривошипов между валами 6 и 7 .
Кинематическое соединение 22 эк0 Бивалентно кинематической паре третьего класса. Кинематическое соединение 26 эквивалентно кинематической паре четвертого класса. Оба эти кинематических соединения конструктивно могут
5 быть выполнены абсолютно идентично для любого из механизмов схемы привода.
Для уменьшения консольной нагрузки на валы 2-7 несущий брус может
Q иметь перегородку 30.
Ротационный режущий аппарат работает следующим образом.
Крутящий момент подается на ведущий вал 3. Вал 3 приводит в движение шатун 9 и закрепленное на нем зубчатое колесо 10. Зубчатое колесо 11, входящее в зацепление с колесом 10, получает от него вращение и приводит в движение вал 4 со скашивающим ротор 8. Элемент 21 получа0 ет движение от кривошипа 3,и, перемещаясь синхронно шатуну 9, передает движение валу 4. Шатун 9 передает движение зубчатому колесу 15, которое в свою очередь приводит в движение
5 колесо 17 и вал 5 со скашивающим
ротором 8. Водило 18 движется вместе с колесом 16. Элемент 27 движется синхронно-шатуну 9.
Шатун 9 передает движение зубча0 тому колесу 22. Зубчатое колесо 19, входящее в зацепление с колесом 22,
получает от него вращение и приводит в движение вал 6 со скашивающим ротором 8. Сателлит 21 и водило 20 приводятся в движение от колеса 22. Элемент 23 движется синхронно шатуну 9 о
Шатун 9 передает движения зубчатому колесу 23, которое приводит в дви5
жение колесо 24 и вал 7 со скашивающим ротором 8. Водило 25 движет ся вместе с колесом 23. Элемент 29 движется синхронно шатуну 9.
Формула изобретения
Ротационный режущий аппарат, содержащий несущий брус, установленные на нем на кривошипных валах скашивающие роторы и расположенный в брусе механизм привода роторов, включающий
ТгггеЭ
, гибкие
10
передающие элементы, отличающийся тем, что, с целью повышения надежности работы, привод роторов выполнен в виде шатуна, на котором последовательно смонтированы шестерни внутреннего и внешнего зацепления, контактирующие с шестернями, установленными на кривошипных валах роторов, при этом гибкие элементы связаны с ножами кривошипных валов посредством шарниров.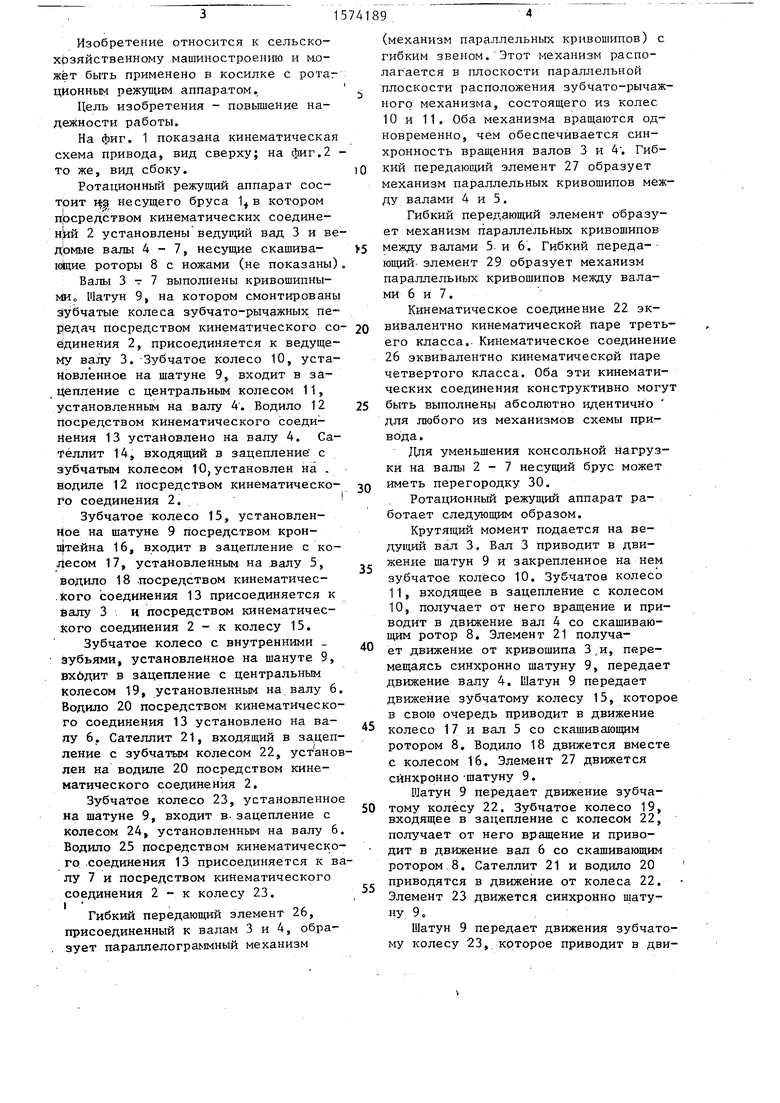
| название | год | авторы | номер документа |
|---|---|---|---|
| Почвообрабатывающая машина | 1985 |
|
SU1353332A2 |
| Ротационный режущий аппарат | 1988 |
|
SU1690595A1 |
| Ротационный режущий аппарат | 1984 |
|
SU1240379A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Вибрационная борона | 1981 |
|
SU1056933A1 |
| Устройство для резки бруса из пластичного материала | 1985 |
|
SU1342742A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ПРЕДМЕТОВ ОБРАБОТКИ | 1993 |
|
RU2049644C1 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| РАБОЧИЙ ОРГАН УСТРОЙСТВА ДЛЯ МОЙКИ АВТОМОБИЛЕЙ | 1991 |
|
RU2017640C1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть применено в косилке с ротационным режущим аппаратом. Использование данного технического решения позволяет повысить надежность работы привода ротационных режущих аппаратов. Ротационный режущий аппарат состоит из несущего бруса 1, в котором посредством кинематических соединений 2 установлены ведущий вал 3 и ведомые валы 6, 7, несущие скашивающие роторы 8 с ножами. Валы 3, 4, 5, 6, 7 выполнены кривошипными и связаны между собой посредством гибких передающих элементов 26, 27, 28, 29 и шатуна 9 с размещенными на нем зубчатыми колесами, входящими в зацепление с зубчатыми колесами, расположенными на валах 3, 4, 5, 6, 7. При вращении вала 3 движение передается посредством шатуна 9 на валы 3, 4, 5, 6, 7, которые также передают вращение друг другу посредством гибких передающих элементов 26, 27, 28, 29. 2 ил.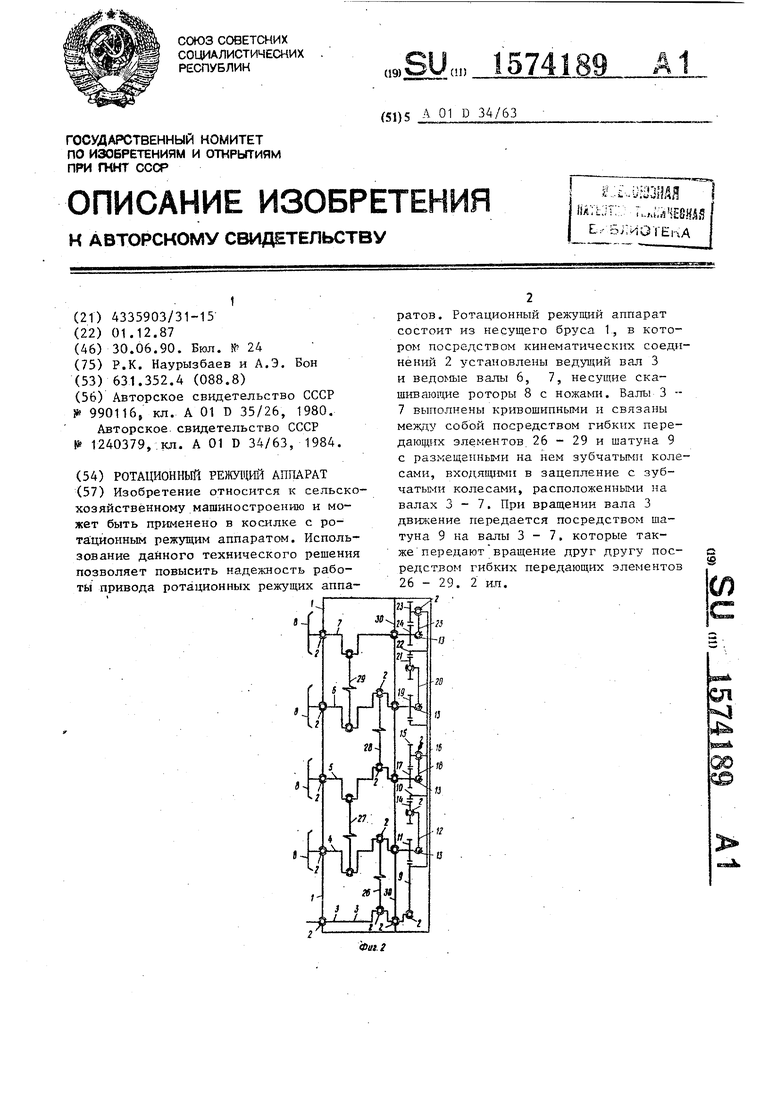
а
ч
| Ротационный режущий аппарат | 1980 |
|
SU990116A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ротационный режущий аппарат | 1984 |
|
SU1240379A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
