Изобретение относится к машиностроению, а именно к конструкциям устройств транспортирования предметов обработки, и может быть использовано в различных многопозиционных технологических машинах для последовательного перемещения предмета обработки между рабочими позициями по циклоидальной траектории.
Известно устройство транспортирования предметов обработки, содержащее планетарный механизм, на осях сателлитов которого установлены захватные органы, совершающие при вращении водила движение по гипоциклоиде.
Недостаток известного циклоидального транспортного устройства в том, что оно не позволяет осуществлять транспортирование длинных в осевом направлении предметов обработки (например, валов), так как траектория их движения проходит над столом закрывающим планетарный механизм.
Известно свободное от названного недостатка устройство транспортирования предметов обработки, содержащее захваты и механизм перемещения захватов, выполненный в виде планетарного механизма с сателлитами и кривошипно-шатунных механизмов, кривошипы которых закреплены на осях сателлитов, а шатуны установлены в кулисах посаженных с возможностью вращения на приводном валу.
При большом (5 и более) количестве захватов кулисы будут расположены на приводном валу одна над другой, увеличивая тем самым вертикальный габарит транспортного устройства. Возникающая при таком расположении разница уровней кулис и захватов приводит к появлению дополнительных моментов, изгибающих кривошипы и увеличивающих их износ.
Изобретение направлено на уменьшение габаритов транспортного устройства и повышение его надежности за счет расположения кулис и захватов на одном уровне, снижающего момент, изгибающий кривошипы, и уменьшающий их износ.
Эта задача решается тем, что известное устройство транспортирования предметов обработки, содержащее захваты и механизм перемещения захватов, выполненный в виде планетарного механизма с сателлитами и кривошипно-шатунных механизмов, кривошипы которых закреплены на осях сателлитов, а шатуны установлены в кулисах, снабжено дополнительным планетарным механизмом, сателлиты которого кинематически связаны с сателлитами планетарного механизма, кулисы установлены на дополнительных кривошипах, закрепленных на сателлитах дополнительного планетарного механизма, при этом числа зубьев, несущих кривошипы сателлитов планетарных механизмов, равны между собой.
Дополнительный кривошип дает возможность уйти от крепления кулис на приводном валу, уменьшить вертикальный габарит транспортного устройства и устранить появление дополнительного момента, изгибающего кривошип. Закрепление дополнительного кривошипа на сателлите дополнительного планетарного механизма, имеющего равное количество зубьев с несущим кривошип сателлитом основного планетарного механизма, обеспечивает синхронность вращения кривошипов и перемещение предмета обработки, укрепленного в захвате, по циклоидальной траектории, последовательно обходящей рабочие позиции.
На чертеже показана кинематическая схема предлагаемого устройства.
Устройство содержит захваты 1, основной и дополнительный планетарные механизмы привода захватов, включающие общие водило 2 и неподвижно установленное зубчатое колесо 3. Сателлиты 4 кинематически связаны с сателлитами 5 основного планетарного механизма и сателлитами 6 дополнительного планетарного механизма. Сателлиты 5 и 6 имеют равное количество зубьев. Кривошип 7 закреплен на сателлите 5, а дополнительный кривошип 8 на сателлите 6. На дополнительном кривошипе 8 установлена кулиса 9, образующая поступательную пару с шатуном 10, шарнирно связанным с кривошипом 7. На шатуне 10 жестко закреплен захват 1 с предметов обработки 11.
Предлагаемое устройство работает следующим образом.
Вращение водила 2 от привода (не показан) передается посредством обкатывания по неподвижному зубчатому колесу 3 сателлиту 4. Связанные с сателлитом 4 сателлиты 5 и 6 синхронно вращают кривошипы 7 и 8, приводя в движение шатун 10. При этом предмет обработки 11, укрепленный в захвате 1, перемещается во циклоидальной траектории, последовательно обходя рабочие позиции.
Предлагаемое транспортное устройство может быть использовано в различных многопозиционных технологических машинах для автоматического перемещения предмета обработки между рабочими позициями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Автомат для штамповки деталей | 1991 |
|
SU1811947A1 |
| МНОГОПОЗИЦИОННАЯ ТЕХНОЛОГИЧЕСКАЯ МАШИНА | 1992 |
|
RU2030274C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2142392C1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ ЯИЦ ИЗ ЯЧЕИСТОЙ ТАРЫ | 1992 |
|
RU2030862C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| Устройство для подачи заготовок | 1987 |
|
SU1548005A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2137686C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2138425C1 |
Изобретение относится к машиностроению. При вращении водила 2 устройства для транспортирования деталей сателлиты 4 обкатываются по неподвижному зубчатому колесу 3 основного планетарного механизма, синхронно вращая через сателлиты 5 и 6 дополнительного планетарного механизма кривошипы 7 и 8 и приводя в движение шатун 10. При этом предмет обработки 11, укрепленный в захвате 1, движется по циклоидальной траектории. 1 ил.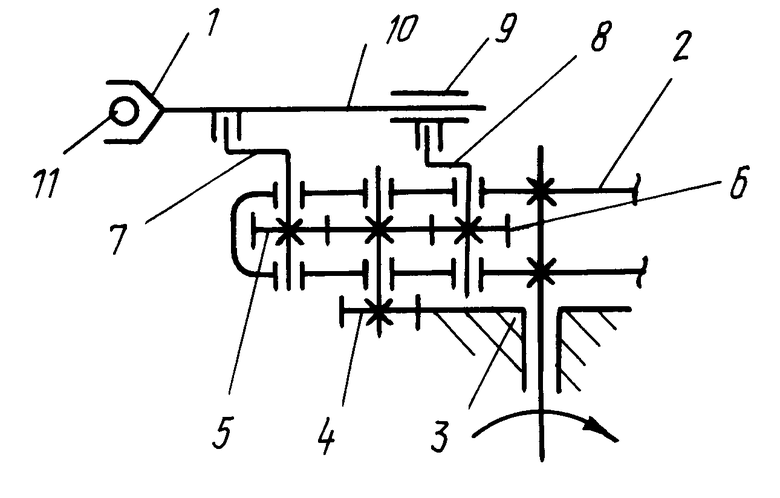
УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ПРЕДМЕТОВ ОБРАБОТКИ, содержащее захваты и привод перемещения захватов, выполненный в виде основного планетарного механизма с сателлитами и кривошипно-шатунных механизмов, кривошипы которых закреплены на осях сателлитов, а шатуны установлены в кулисах, отличающееся тем, что оно снабжено дополнительным планетарным механизмом, сателлиты которого кинематически связаны с сателлитами основного планетарного механизма, кулисы установлены на дополнительных кривошипах, закрепленных на сателлитах дополнительного планетарного механизма, при этом числа зубьев несущих кривошипы сателлитов планетарных механизмов равны между собой.
| Устройство для подачи заготовок | 1987 |
|
SU1548005A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
