Изобретение относится к технике I манипулирования тонкими гибкими изделиями к может быть использовано для имитации движения исследуемого объекта.
Цель изобретения - повышение достоверности результатов физического моделирования за счет обеспечения разнообразия конфигурации плоских траекторий движения исследуемого объекта.
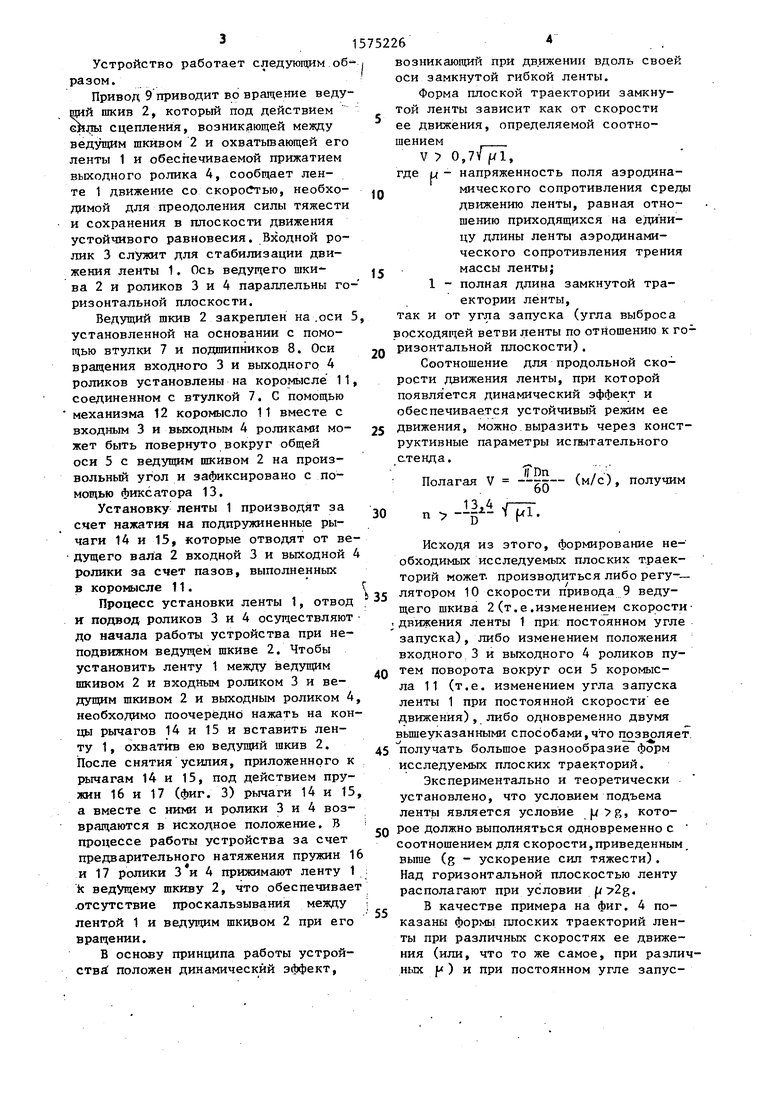
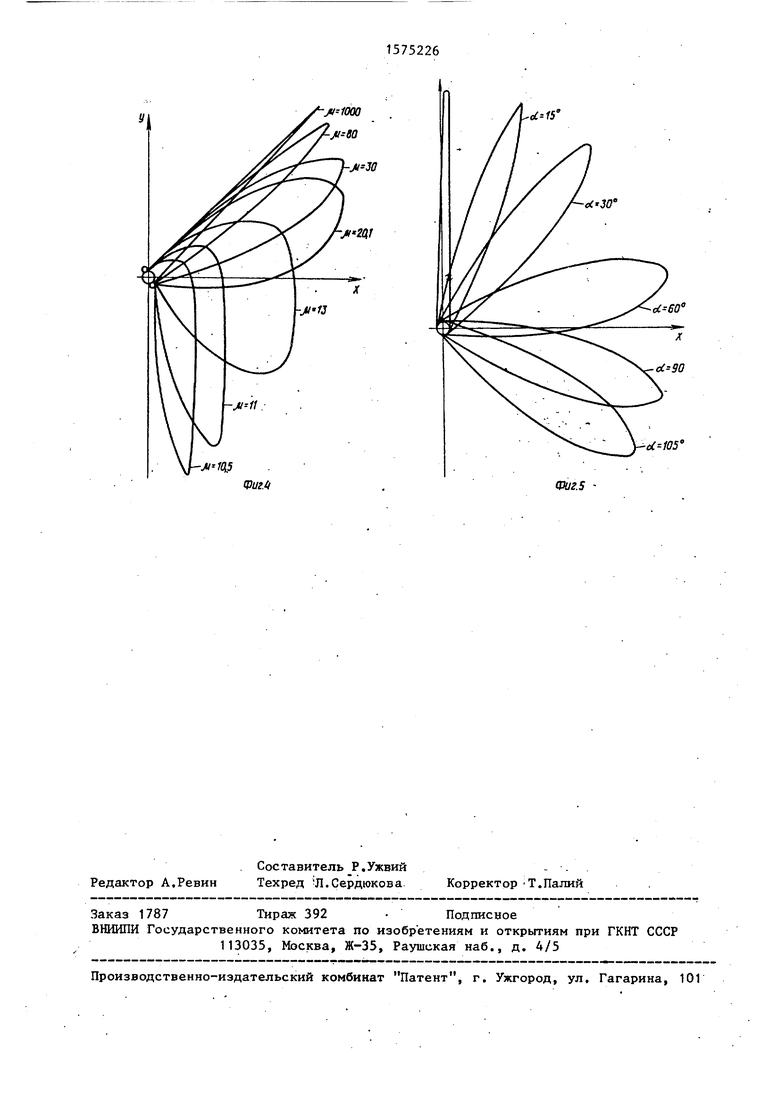
На фиг. 1 изображено предлагаемое устройство в рабочем положении, аксонометрия; на фиг. 2 - то же, разрез} на фиг. 3 - разрез А-А на фиг. 2; на ФИР. 4 и фиг. 5 - формы плоских траекторий ленты.
Устройство содержит гибкую ленту .1 с нанесенным на ней эквивалентом объекта, охватывающую ведущий шкив 2, который приводится во вращение приводом 9 с регулятором 10 скорости. ,
Лента 1 прижата к ведущему шкиву 2 входным Зи выходным 4 роликами,которые установлены на коромысле 11,качающемся относительно общей оси 5 с веду- щим шкивом 2 и имеющим механизм 12 его поворота, снабженный фиксатором 13 и размещенный соосно с приводом 9 ведущего шкива 2. Кроме того устройство содержит рычаги 14 и 15, основание 6, втулку 7, подшипник 8, и пружины 16 и 17.
сд сд
N3 Ю
оэ
Устройство работает следующим об- разом.
Привод 9 приводит во вращение ведущий шкив 2, который под действием силы сцепления, возникающей между ведущим шкивом 2 и охватывающей его ленты 1 и обеспечиваемой прижатием выходного ролика 4, сообщает ленте 1 движение со скоростью, необходимой для преодоления силы тяжести и сохранения в плоскости движения устойчивого равновесия. Входной ролик 3 служит для стабилизации движения ленты 1. Ось ведущего шки ва 2 и роликов 3 и 4 параллельны горизонтальной плоскости.
Ведущий шкив 2 закреплен на оси 5 установленной на основании с помощью втулки 7 и подшипников 8. Оси вращения входного 3 и выходного 4 роликов установлены на коромысле 11, соединенном с втулкой 7. С помощью механизма 12 коромысло 11 вместе с входным 3 и выходным 4 роликами может быть повернуто вокруг общей оси 5 с ведущим шкивом 2 на произвольный угол и зафиксировано с помощью фиксатора 13.
Установку ленты 1 производят за счет нажатия на подпружиненные рычаги 14 и 15, которые отводят от ведущего вала 2 входной 3 и выходной 4 ролики за счет пазов, выполненных в коромысле 11.
Процесс установки ленты 1, отвод и подвод роликов 3 и 4 осуществляют до начала работы устройства при неподвижном ведущем шкиве 2. Чтобы установить ленту 1 между ведущим шкивом 2 и входным роликом 3 и ведущим шкивом 2 и выходным роликом 4, необходимо поочередно нажать на концы рычагов 14 и 15 и вставить ленту 1, охватив ею ведущий шкив 2. После снятия усилия, приложенного к рычагам 14 и 15, под действием пружин 16 и 17 (фиг. 3) рычаги 14 и 15, а вместе с ними и ролики 3 и 4 возвращаются в исходное положение. В процессе работы устройства за счет предварительного натяжения пружин 16 и 17 ролики 4 прижимают ленту 1 к ведущему шкиву 2, что обеспечивает отсутствие проскальзывания между лентой 1 и ведущим шкивом 2 при его вращении.
В основу принципа работы устройства положен динамический эффект,
0
5
0
5
0
возникающий при движении вдоль своей оси замкнутой гибкой ленты.
Форма плоской траектории замкнутой ленты зависит как от скорости ее движения, определяемой соотношением
V 0,7Г|йТ,
где и - напряженность поля аэродинамического сопротивления среды движению ленты, равная отношению приходящихся на единицу длины ленты аэродинамического сопротивления трения массы ленты;
полная длина замкнутой траектории ленты,
так и от угла запуска (угла выброса восходящей ветви ленты по отношению к горизонтальной плоскости).
Соотношение для продольной скорости движения ленты, при которой появляется динамический эффект и обеспечивается устойчивый режим ее движения, можно выразить через конструктивные параметры испытательного стенда.
Пп 60 13,4
1
Полагая V
(м/с), получим
-М -ГТТ п 5А- Ч pi.
Исходя из этого, формирование необходимых исследуемых плоских траекторий может, производиться либо регу-- 35 лятором 10 скорости привода 9 ведущего шкива 2(т.е.изменением скорости j движения ленты 1 при постоянном угле запуска), либо изменением положения входного 3 и выходного 4 роликов пудр тем поворота вокруг оси 5 коромысла 11 (т.е. изменением угла запуска ленты 1 при постоянной скорости ее движения), либо одновременно двумя вышеуказанными способами,что позволяет 45 получать большое разнообразие форм исследуемых плоских траекторий.
Экспериментально и теоретически установлено, что условием подъема ленты является условие , кото- 5Q рое должно выполняться одновременно с соотношением для скорости,приведенным, выше (g - ускорение сил тяжести). Над горизонтальной плоскостью ленту располагают при условии .
В качестве примера на фиг. 4 показаны формы плоских траекторий ленты при различных скоростях ее движения (или, что то же самое, при различных р) и при постоянном угле запус55
ка, равном 45°.
На фиг. 5 показаны формы плоских траекторий ленты при различных углах запуска при постоянной скорости (при. постоянном ц 30).
Скорость движения замкнутой ленты ограничивается механической прочностью ленты на разрыв. Эта скорость определяется следующим соотношением
где Т J- допускаемое усилие на разрыв
ленты;
m - погонная масса ленты. Это соотношение также может быть выражено через конструктивные параметры испытательного стенда. Полагая
ffDn бб
V
(м/с),
получим
п
I CTJ С D m
Использование предлагаемого устройства (по сравнению с известными) повышает достоверность результатов физического моделирования за счет обеспечения разнообразия конфигураций плоских тракторий исследуемого объекта.
Формула изобретения
Устройство для физического моделирования полета исследуемого объекта, со- держащее гибкий ленточный подвижный эле- .мент, охватывающий ведущий шкив и прижатый к нему входным и выходным роли
ками, отличающееся тем, что, с целью повышения достоверности7 результатов физического моделирования за счет обеспечения разнообразия конфигураций плоских траекторий движения исследуемого объекта, оно имеет коромысло с механизмом его поворота и фиксации в заданном положении, при этом ось коромысла совмещена с осью щего шкива, а входной и выходной ролики установлены на концах коромысла, привод ведущего шкива снабжен регулятором скорости, обеспечивающим следующие пределы регулирования частоты вращения ведущего шкива п (об/мин -.
0
D
Чл J.
5
0
5
где D - диаметр ведущего шкива, м; допускаемое усилие на разрыв гибкого ленточного подвижного элемента, кг; m - погонная масса гибкого ленточного подвижного элемента; кг/м;
и - напряженность поля аэродинамического сопротивления среды движению гибкого ленточного подвижного элемента, равная отношению приходящихся на единицу длины . элемента аэродинамического сопротивления трения и массы элемента, 1 - полная длина гибкого ленточного подвижного элемента, м.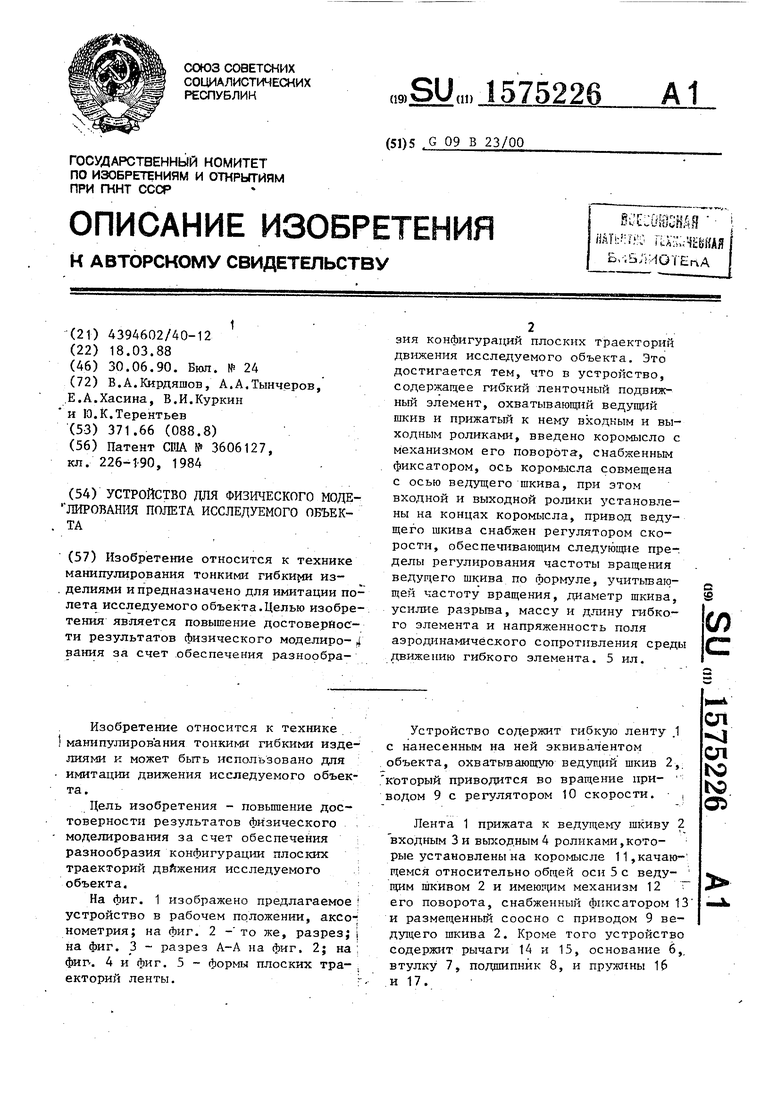
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для добычи тяжелой нефти | 2019 |
|
RU2705680C1 |
| Устройство для ленточного шлифования | 1978 |
|
SU882728A2 |
| Ленточно-шлифовальный станок для обработки кромок пера лопаток | 1980 |
|
SU891366A1 |
| Установка для непрерывного изготовления гибких рукавов из ленточного полимерного материала | 1985 |
|
SU1248842A1 |
| Ленточно-шлифовальный станок для обработки кромок пера лопаток | 1981 |
|
SU1004079A1 |
| ПРИВОДЫ С ПОСТОЯННОЙ ЛИНЕЙНОЙ СКОРОСТЬЮ ЛОПАСТЕЙ ДЛЯ ЦИКЛОИДНЫХ РОТОРОВ И ГРЕБНЫХ ПРОПЕЛЛЕРОВ С НЕКРУГОВЫМИ ОРБИТАМИ | 2024 |
|
RU2828914C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ С ГИБКИМИ СВЯЗЯМИ | 2003 |
|
RU2229642C1 |
| Конвейер | 1990 |
|
SU1751100A1 |
| СПОСОБ УНИЧТОЖЕНИЯ КОЛОРАДСКОГО ЖУКА С ИЗМЕЛЬЧЕНИЕМ БОТВЫ КАРТОФЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2361399C2 |
| СПОСОБ И УСТАНОВКА ДЛЯ ИЗВЛЕЧЕНИЯ ТВЕРДОГО ОСАДКА ПУТЕМ ВЫПАРИВАНИЯ ИЗ ТЕКУЧЕГО ВЕЩЕСТВА | 1999 |
|
RU2212925C2 |
Изобретение относится к технике манипулирования тонкими гибкими изделиями и предназначено для имитации полета исследуемого объекта. Целью изобретения является повышение достоверности результатов физического моделирования за счет обеспечения разнообразия конфигураций плоских траекторий движения исследуемого объекта. Это достигается тем, что в устройство, содержащее гибкий ленточный подвижный элемент, охватывающий ведущий шкив и прижатый к нему входным и выходным роликами, введено коромысло с механизмом его поворота, снабженным фиксатором, ось коромысла совмещена с осью ведущего шкива, при этом входной и выходной ролики установлены на концах коромысла, привод ведущего шкива снабжен регулятором скорости, обеспечивающим следующие пределы регулирования частоты вращения ведущего шкива по формуле, учитывающей частоту вращения, диаметр шкива, усилие разрыва, массу и длину гибкого элемента и напряженность поля аэродинамического сопротивления среды движения гибкого элемента. 5 ил.
Фиг. f
/
Фиг. 2
12
-Л ЩУ
mutti
-ct:15
JU X
Фиг 5
| Патент CPJA № 3606127, кл | |||
| Переносное устройство для вырезания круглых отверстий в листах и т.п. работ | 1919 |
|
SU226A1 |
