Изобретение относится к области военной техники, в частности к ходовой части колесных многоосных шасси (далее - КМШ).
Известны способы повышения плавности хода, например, для ГМ-352, когда для повышения плавности хода используется гидропневматические рессоры, состоящие из цилиндров, поршней, штоков, амортизаторов и пневмобаллонов (Учебник «Военные автомобили и гусеничные машины. Основы конструкции шасси». ГАБТУ МО РФ. «Рыбинский Дом печати» - АРП. Рыбинск-Рязань, 1996. В.Ф. Васильченков, с. 386-388. Открытое издание.).
Кроме того, известен способ повышения плавности хода КМШ для автомобильного шасси 135 ЛМ, в котором используется подвеска неуправляемых (средних) колес, не имеющих эластичной подвески, а также управляемых (передних и задних) колес шасси, имеющих независимую торсионную подвеску, включающую направляющее устройство, упругий элемент (торсион) и амортизатор гидравлического рычажного типа, двойного действия с рычажно-кулачковым приводом, предназначенные для смягчения толчков, ударов и быстрого гашения колебаний рамы (корпуса) при движении по неровностям местности (Техническое описание и инструкция по эксплуатации автомобильного шасси 135 ЛМ. - М.: Военное издательство МО СССР, 1966, с. 112, 115. Открытое издание. Прототип).
Известный способ повышения плавности хода КМШ обеспечивает смягчение толчков, ударов и быстрое гашение колебаний корпуса при движении по неровностям местности и преодолении препятствий.
Однако указанный способ не в полной мере позволяет исключить колебания корпуса КМШ при движении по пересеченной местности, в том числе на высоких скоростях движения, что приводит к снижению эргономических показателей машины (перегрузке экипажа), повышению нагрузки (динамической) на узлы и механизмы машины, что может привести к выходу их из строя, а также повышению вероятности пробоя подвески.
Задача изобретения заключается в повышении плавности хода КМШ, достигаемой с помощью автоматического регулирования положения корпуса шасси с использованием бортовой информационно-управляющей системы (БИУС).
Техническим решением изобретения является использование в составе способа повышения плавности хода КМШ БИУС, клапанно-золотниковой коробки, расширительного бака, гидронасоса, датчика отклонения угла балансира, датчика скорости и гидропневмоцилиндров с трубопроводами.
Техническим результатом изобретения является обеспечение автоматической стабилизации корпуса КМШ, улучшение эргономических показателей, являющихся весьма значимыми для экипажа и перевозимого груза (вооружения), исключение пробоя подвески.
При этом способ повышения плавности хода КМШ основан на том, что установленный в носовой части шасси первый опорный каток с балансиром и датчиком отклонения угла при отклонении балансира во время движения машины по неровностям местности формирует и передает сигнал о наличии неровностей (кочек и ям) в БИУС, которая также принимает сигналы от датчика скорости, обрабатывает принятые сигналы и управляет клапанно-золотниковой коробкой, осуществляющей регулирование потоков жидкости, проходящих от гидронасоса в определенные гидроцилиндры, в определенные периоды времени, тем самым регулируется положение опорных катков КМШ (выдвигаются, задвигаются) и обеспечивается прямолинейность шасси при езде по неровностям местности.
Способ повышения плавности хода колесного многоосного шасси включает подвеску неуправляемых колес, не имеющих эластичной подвески, а также управляемых колес шасси, имеющих независимую торсионную подвеску, состоящую из направляющего устройства, упругого элемента и амортизатора гидравлического рычажного типа, двойного действия с рычажно-кулачковым приводом, предназначенных для смягчения толчков, ударов и быстрого гашения колебаний рамы при движении по неровностям местности. Согласно изобретению в составе способа используют бортовую информационно-управляющую систему, принимающую, обрабатывающую сигналы от датчика отклонения угла балансира и датчика скорости, при движении машины и в определенные периоды времени передающей сигналы на клапанно-золотниковую коробку, управляют потоками жидкости, проходящими от гидронасоса через клапанно-золотниковую коробку к гидропневмоцилиндрам, регулируют положение опорных катков и положение корпуса машины.
Изобретение поясняется фиг. 1, на которой показано устройство, обеспечивающее работу способа повышения плавности хода КМШ, где: 1 - датчик отклонения угла балансира; 2 - балансир; 3 - электропровода; 4 - БИУС; 5 - клапанно-золотниковая коробка; 6 - расширительный бак; 7 - трубопроводы; 8 - гидронасос; 9 - первый опорный каток; 10 - датчик скорости; 11 - опорный каток; 12 - дорожное полотно; 13 - гидропневмоцилиндр; 14 - шток с поршнем; 15 - полость с газом; 16 - рабочая полость.
На фиг. 1 пунктиром (------) показана электросвязь между датчиком отклонения угла балансира 1, датчиком скорости 10, БИУС 4 и клапанно-золотниковой коробкой 5.
При движении КМШ по дорожному полотну 12 (ямы, кочки) балансир 2, скрепленный с первым опорным катком 9, производит колебательные движения, которые фиксируются датчиком отклонения угла балансира 1. Датчик скорости 10 служит для определения скорости движения КМШ и передачи сигнала по электропроводам 3 на БИУС 4, которая принимает, обрабатывает сигналы с датчика скорости 10, установленного в первом опорном катке 9, и датчика отклонения угла балансира 1 и управляет по электропроводам 3 клапанно-золотниковой коробкой 5, распределяющей в определенный период времени потоки жидкости, проходящие по трубопроводам 7 от гидронасоса 8 в рабочую полость 16 гидропневмоцилиндра 13. Гидронасос 8 предназначен для создания давления в системе. В гидропневмоцилиндре 13 расположена полость с газом 15 и при наезде на кочку дорожного полотна 12 опорный каток 11, жестко соединенный через подшипник со штоком с поршнем 14, передвигает шток вверх, который сжимает газ в полости с газом 15. При наезде на яму опорный каток 11 перемещается вниз и передвигает за собой шток с поршнем 14. Для исключения пробоя подвески БИУС 4 регулирует через клапанно-золотниковую коробку 5 количество жидкости, находящейся в рабочей полости 16 гидропневмоцилиндра 13 (подает жидкость - при наезде на яму и осуществляет ее забор - при наезде на кочку). Через расширительный бак 6 производится заправка системы жидкостью.
Пример работы способа. При движении КМШ по дорожному полотну 12 балансир 2, скрепленный с первым опорным катком 9, производит колебательные движения, которые фиксируются датчиком отклонения угла балансира 1. Датчик скорости 10 определяет скорость шасси. Датчик отклонения угла балансира 1 и датчик скорости 10 передают сигналы по электропроводам 3 на БИУС 4, которая принимает, обрабатывает сигналы и управляет по электропроводам 3 клапанно-золотниковой коробкой 5, распределяющей потоки жидкости, проходящие по трубопроводам 7 от гидронасоса 8 в рабочую полость 16 гидропневмоцилиндра 13. В гидропневмоцилиндре 13 расположена полость с газом 15, и при наезде на кочку дорожного полотна 12 опорный каток 11, жестко соединенный через подшипник со штоком с поршнем 14, передвигает шток вверх, который сжимает газ в полости с газом 15 гидропневмоцилиндра 13. При наезде на яму опорный каток 11 передвигает вниз шток с поршнем 14. Для исключения пробоя подвески БИУС 4 регулирует через клапанно-золотниковую коробку 5 количество жидкости, находящейся в рабочей полости 16 гидропневмоцилиндра 13. Через расширительный бак 6 производится заправка системы жидкостью.
Предлагаемый способ позволяет при движении колесного многоосного шасси автоматически регулировать положение корпуса, улучшить эргономические показатели (снизив колебательные движения экипажа), исключить пробой подвески, снизить динамическую нагрузку с узлов и агрегатов машины.
Литература
1. Техническое описание и инструкция по эксплуатации автомобильного шасси 135 ЛМ. - М.: Военное издательство МО СССР, 1966, с. 112, 115. Открытое издание.
2. Учебник «Военные автомобили и гусеничные машины. Основы конструкции шасси». ГАБТУ МО РФ. «Рыбинский Дом печати» - АРП. Рыбинск-Рязань, 1996. В.Ф. Васильченков, с. 386-388. Открытое издание.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2105691C1 |
| Способ повышения сцепных свойств колёсного транспортного средства | 2017 |
|
RU2658244C1 |
| Способ повышения сцепных свойств колёс автомобиля с ледяной дорогой | 2017 |
|
RU2651366C1 |
| ДВУХСТУПЕНЧАТОЕ АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2597061C2 |
| ПОДВЕСКА ТАНКА | 2010 |
|
RU2422292C1 |
| ПОДВЕСКА ПРИЦЕПА | 1995 |
|
RU2127199C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| ПОДВЕСКА ГУСЕНИЧНОГО ДВИЖИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794144C1 |
| ХОДОВАЯ ЧАСТЬ ДВУХЗВЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2023 |
|
RU2802326C1 |
| Гидропневматическая подвеска для транспортного средства | 1990 |
|
SU1791167A1 |
Изобретение относится к области военной техники, в частности к ходовой части колесных многоосных шасси. Способ повышения плавности хода колесного многоосного шасси включает подвеску неуправляемых колес, не имеющих эластичной подвески, а также управляемых колес шасси, имеющих независимую торсионную подвеску. Независимая торсионная подвеска состоит из направляющего устройства, упругого элемента и амортизатора гидравлического рычажного типа, двойного действия с рычажно-кулачковым приводом, предназначенных для смягчения толчков, ударов и быстрого гашения колебаний рамы при движении по неровностям местности. В составе способа используют бортовую информационно-управляющую систему, принимающую, обрабатывающую сигналы от датчика отклонения угла балансира и датчика скорости. При движении машины и в определенные периоды времени бортовая информационно-управляющая система передает сигналы на клапанно-золотниковую коробку, управляя потоками жидкости проходящей от гидронасоса через клапанно-золотниковую коробку к гидропневмоцилиндрам, регулируя положение опорных катков и положение корпуса машины. Достигается обеспечение автоматической стабилизации корпуса колесного многоосного шасси, улучшение эргономических показателей и исключение пробоя подвески. 1 ил.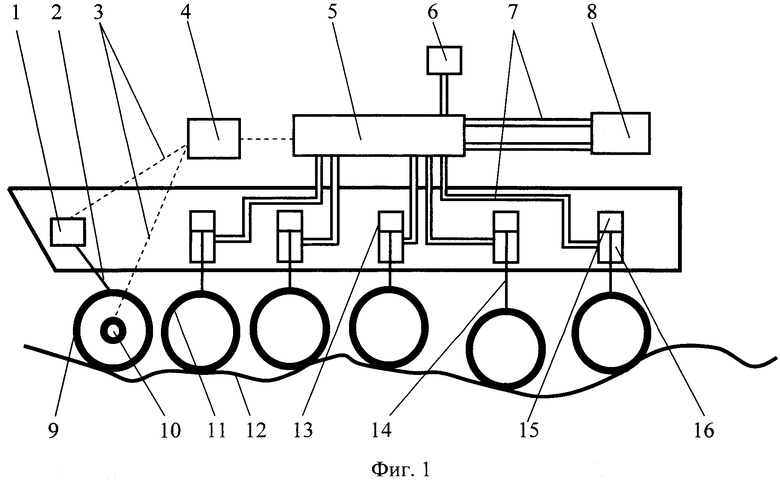
Способ повышения плавности хода колесного многоосного шасси, включающий подвеску неуправляемых колес, не имеющих эластичной подвески, а также управляемых колес шасси, имеющих независимую торсионную подвеску, состоящую из направляющего устройства, упругого элемента и амортизатора гидравлического рычажного типа, двойного действия с рычажно-кулачковым приводом, предназначенных для смягчения толчков, ударов и быстрого гашения колебаний рамы при движении по неровностям местности, отличающийся тем, что в составе способа используют бортовую информационно-управляющую систему, принимающую, обрабатывающую сигналы от датчика отклонения угла балансира и датчика скорости, при движении машины и в определенные периоды времени передающую сигналы на клапанно-золотниковую коробку, управляют потоками жидкости, проходящими от гидронасоса через клапанно-золотниковую коробку к гидропневмоцилиндрам, регулируют положение опорных катков и положение корпуса машины.
| US 3625303 A, 07.12.1971;RU 2501688 C1, 20.12.2013;WO 2013111736 A1, 01.08.2013;JPH 04362411 A, 15.12.1992 |

