Изобретение относится к испытательной технике и может быть использовано в машиностроении.
Целью изобретения является повышение помехоустойчивости, которое достигается путем измерения только двух текущих интервалов времени и последующего функционально их преобразования.
В режиме затухающих колебаний линейных механических колебательных
систем с одной степенью свободы промежуток времени между двумя соседни- ми моментами положениями равновесия
равен
Дг tb - t,
/W ,
(О
где
Си
(2)
си,
- частота свободных колебаний;
uJ, - собственная частота колебаний;
h - коэффициент демпфирования
(параметр рассеяния механической энергии); -первый и второй соседние моменты прохождения положения равновесия.
Обозначим
t,,t
Л3 &г-2йл (t 2(t5- tl)
з- t,) - t
- 2ts +
1
где t - момент равенства нулю скоI
рости колебаний.
(3)
(4)
(5)
Определим h из (5)
( 1
1 и
-
2 (6)
Из соотношения (2) определим td
. Ш} +
h1
(7)
Учитывая соотношения (1),(6) и (7), получим
to.
X
или
1Г
1
cos
Г ( Л«
-t 2
Учитывая, что
ZU 4- - 24
1
(9)
оя
10
о15
)
20
25
)
30
d
35
40
45
(8)
50
)
55
Ю)
42 между со- и t положеВведенные новые операции позволяют за счет измерения только двух текущих интервалов времени (исходные данные) без измерения мгновенных значений перемещения, скорости и ускорения путем функционального преобразования исходных данных получить значения параметра h рассеяния механической энергии и частоты WJfl собственных колебаний системы, что повышает помехоустойчивость.
Предложенный способ осуществляют следующим образом.
Исследуемая линейная механическая колебательная система возбуждается каким-либо механическим воздействием, например кратковременным воздействием - ударом.
Свободное движение в этом случае представляет собой затухающие колебания .
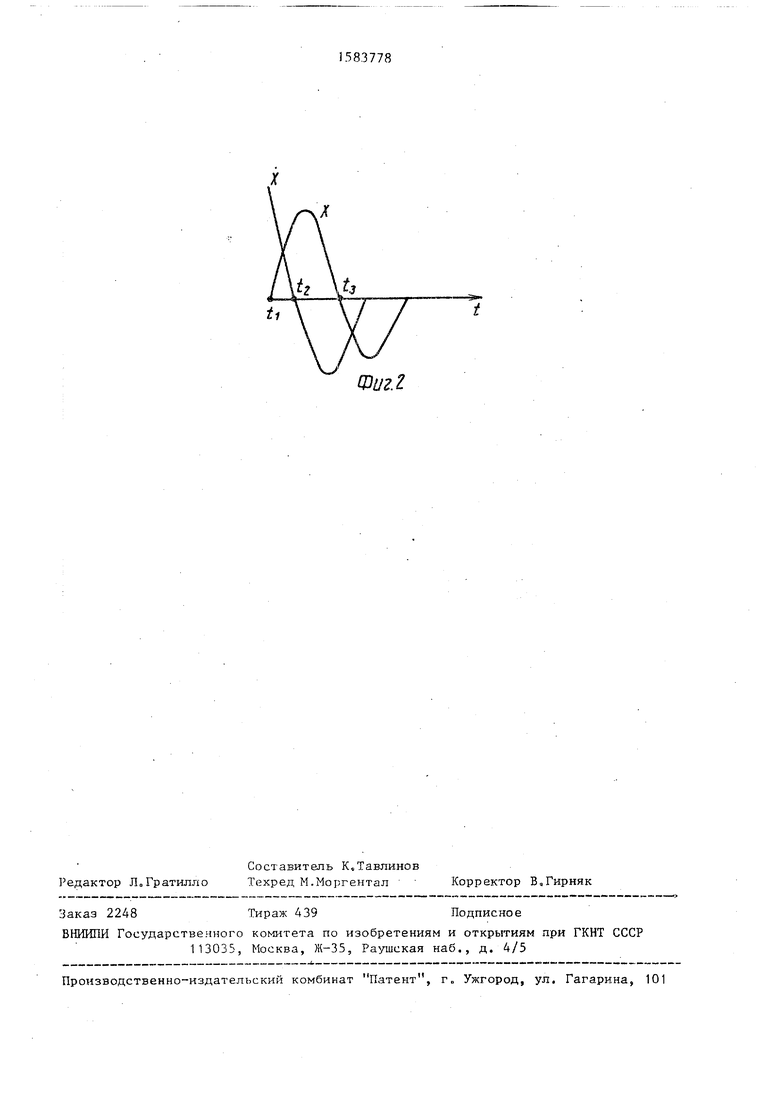
Фиксируют сигнал, равный промежутку Л , времени между моментом t , прохождения положения равновесия и моментом t: 2 равенства нулю скорости и промежутку времени седними моментами t 1 ния равновесия.
Как следует из теоретических исследований (соотношения (9) и (lO)J параметр h рассеяния механической энергии и собственную частоту uja определяют в результате Лункциональ- ного преобразования сигналов Д1 и
Л2.
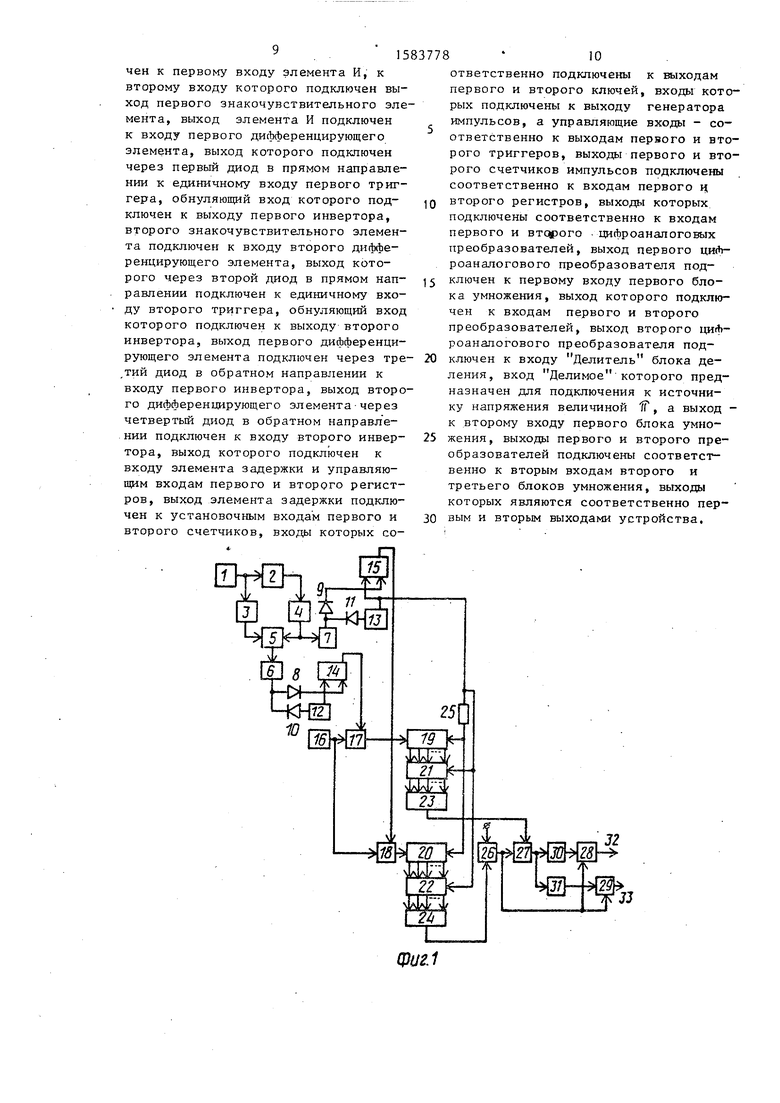
На фиг.1 представлена структурная схема устройства для реализации предложенного способа определения рассеяния энергии и собственной частоты линейной механической колебательной системы; на фиг. 2 - эпюры затухающих колебаний перемещения X и скорости X .
Устройство содержит измерительный преобразователь 1 скорости X,интегратор 2, первый 3 и второй 4 знако- чувствительные элементы, элемент И5, первый 6 и второй 7 дифференцирующие элементы, первый 8, второй 9, третий 10 и четвертый 1 I диоды,пер - вый 12 и второй 13 инверторы,первый 14 и второй 15 триггеры,генератор 16 импульсов, первый 17 и второй 18 ключи, первый 19 и второй 20 счетчики импульсов, первый 21 и второй 22 регистры, первый 23 и второй 24 циф- роаналоговый преобразователи (ЦАП), элемент 25 задержки, блок 26 деле515
ния, первый 27, второй 28 и третий 29 блоки умножения, первый 30 и второй 31 преобразователи, первый 32 и второй 33 выходы устройства.
Выход измерительного преобразователя 1 скорости подключен к объединенным входам интегратора 2 и первого знакочувствительного элемента 3, выход интегратора 2 подключен к вхо- ду второго знакочувствительного элемента 4, выход которого подключен к первому входу элемента И5 непосредственно, а к единичному входу второ- го триггера 15 - через последова- тельно соединенные второй дисЬгЬерен- цирующий элемент 7 и второй диод 9 в прямом направлении.
Нулевой вход второго триггера 15 подключен к выходу второго цифАерен- цирующего элемента 7 через последовательно соединенные четвертый диод 11 и второй инвертор 13.
Выход первого знакочувствительного элемента 3 подключен к второму входу элемента И5, выход которого через последовательно соединенные первый дифференцирующий элемент 6 и первый диод 8, включенный в прямом направлении к единичному входу первого триггера 14, нулевой вход которого подключен к выходу первого дифференцирующего элемента 6 через последовательно соединенные третий диод 10, включенный в обратном нап- равлении, и первый инвертор 12,
Единичные выходы первого 14 и второго 15 триггеров подключены к управляющим входам первого 17 и второго 18 ключей соответственно, входы которых объединены и подключены к выходу генератора 16 импульсов.
Выходы первого 17 и второго 18 ключей подключены к входам первого 19 и второго 20 счетчиков соответст- венно,
Выходы разрядов первого 19 и второго 20 счетчиков подключены к входа первого 21 и второго 22 регистров соответственно, выходы которых через первый 23 и второй 24 ЦАП соответственно подключены к первому входу блока 27 умножения и входу Делитель блока 26 деления, к входу Делимое которого подключен выход источника напряжения величиной fT соответственно.
Выход блока 26 деления подключен к объединенным первым входам первого
27, второго 28 и третьего 29 блоков умножения. Выход первого блока 27 умножения подключен к объединенным входам первого 30 и второго 31 преобразователей, выходы которых подключены к вторым входам блоков 28 и 29 умножения соответственно,выходы которых подключены к первому 32 и второму 33 выходам устройства.
Выход второго инвертора 13 подключен к управляющим входам первого 21 и второго 22 регистров непосредственно, а к установочным входам первого 19 и второго 20 счетчиков через элемент 25 задержки.
Устройство работает следующим образом.
Измерительный преобразователь 1 скорости формирует на выходе напряжение, пропорциональное производной перемещения X, а на выходе интегратора 2 формируется напряжение,пропорциональное перемещению X. На выходах первого 3 и второго 4 знакочувстви- тельных элементов формируются сигналы в течение положительных полупериодов входных сигналов XX соответственно .
На выходе элемента И5 формируется сигнал при совпадении положительных значений X и X в каждом полупериоде.
В момент t формирования сигнала на выходе элемента И5 первый триггер 14 устанавливается в единичное состояние импульсом с выхода первого диода В, ,
При этом первый ключ 17 замыкается и на вход первого счетчика 19 поступают импульсы с выхода генератора 6 импульсов.
В тот же момент t1 времени второй триггер 15 устанавливается в единичное состояние импульсом с выхода второго дифференцирующего элемента /. При этом замыкается второй ключ 18 и импульсы с выхода генератора 16 импульсов поступают на вход второго счетчика 20,
Первый триггер 14 устанавливается в нулевое состояние импульсом с выхода первого дифференцирующего эле- кента 6, соответствующим заднему Лронту импульса с элемента И5 (момент t2 ).
Начиная с момента t, содержимое первого счетчика 19 остается без изменения.
В момент t3 времени, соответствующий заднему Арона у импульса с второго знакочувствительного элемента 4, второй триггер 15 устанавливается s пулевое состояние, при этом второй люч 18 размыкается и содержимое второго счетчика 20 больше че изменяется. Кроме того, импульс, Формируемый в момент t-g времени, поступает на входы первого 21 и второго 22 регистров, в результате чего содержимое Первого счетчика 19 переносится в первый регистр 23, а содержимое второго счетчика 20 переносится во вто- рой регистр 22, Тот же импульс,задержанный элементом 25 задержки, поступает на установочные входы первого 19 и второго 20 счетчиков, устанавливая их в пулевое состояние.
Сигнал и з с выхода второго ЦАП 24 поступает на вход Делитель блока 26 деления, на вход Делимое которого поступает сигнал, равный 1Г . Сигнал, равный и/4-j, поступает на первый вход первого блока 27 умножения, на второй вход которого поступает сигнал /), с выхода первого ДАЛ 23.
Сигнал с выхода первого блока 27
1Г умножения, равный -.- /I,, поступает
на входы первого 30 и второго 31 преобразователей, на выходе первого из которых формируется сигнал, равный
di
ctg (--;- 1Г),
а на выходе второго 2.Л,
сигнал, равный l/sin(--- If),
д 2
Сигналы с выходов первого 30 и второго 31 преобразователей поступают на первые входы второго 28 и третьего 29 блоков умножения соответственно, на вторые входы которых поступает сигнал с выхода блока 26 деления.
На выходе второго блока 28 умножечи формируется сигнал, равный h, а на выходе третьего блока 29 умножения Лорми руется сигнал, равный (.ор.
Формула изобретения
1. Способ определения рассеяния энергии и собственней частоты механической колебательной системы, заключающийся в том, что возбуждают затухающие колебания исследуемой системы, фиксируют моменты
прохождения положения равновесия и равенств а нулю скорости колебаний, отличающийся тем,что, с целью повышения помехоустойчивости, измеряют первый интервал времени между первым моментом прохождения поло-, жения равновесия и моментом равенства нулю скорости колебаний и второй интервал времени между первым и вторым моментами прохождения положения равновесия, параметр рассеяния энергии h и собственную частоту колебаний системы определяют из
5
0
5
0
5
0
5
где
,
t г t,J
Af
t зt
t ч
ti
л,
первый и второй соседние моменты прохождения положения равновесия; момент равенства нулю скорости колебаний; первый интервал времени ;
второй интервал времени,
2. Устройство для определения рассеяния энергии и собственной частоты механической системы, содер-. жащее вибропреобразовательf устанавливаемый на испытуемом объекте, два ключа, два регистра и генератор сигналов, отличающее ся тем, что, с целью повышения помехоустойчивости, оно снабжено интегратором, двумя знакочувствительными элементами, элементом И, двумя дифференцирующими элементами, четырьмя диодами., двумя инверторами, двумя триггерами, двумя счетчиками импульсов, двумя цпфроанаЛоговыми преобразователями, элементом- задержки, блоком деления, тремя блоками умножения и двумя преобразователями, в качестве генератора сигналов использован генератор импульсов, а вибропреобразователь представляет собой преобразователь скорости, выход ко- - торого подключен к входам первого знакочувствительного элемента и интегратора, выход которого подключен к входу второго знакочувствительного элемента, выход которого подклю
Изобретение относится к испытательной технике. Цель изобретения - повышение помехоустойчивости. Цель достигается путем измерения только двух текущих интервалов времени (исходные данные) и последующего функционального преобразования исходных данных. Исследуемая линейная механическая колебательная система возбуждается каким-либо механическим воздействием, например, ударом. Свободное движение в этом случае представляет собой затухающие колебания. Фиксируют сигналы, равные промежутку времени Δ 1 между первым моментом T 1 прохождения положения равновесия и моментом T 2 равенства нулю скорости колебаний и промежутку времени Δ 2 между первым моментом T 1 и вторым моментом T 3 прохождения положения равновесия. Параметр H рассеяния механической энергии и собственную частоту ω о колебаний системы определяют из условия H=φ/Δ 2 .CTG(Δ 1/Δ 2φ)
Ω 0=φ/Δ 2 .1/SIN(Δ 1/Δ 2φ, где Δ 1=T 2-T 1
Δ 2=T 3-T 1. 2 ил.
Фиг.1
Фиг.2.
| Способ определения рассеяния энергии и собственной частоты линейной колебательной механической системы | 1985 |
|
SU1295254A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для виброиспытаний | 1985 |
|
SU1352321A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
