Изобретение относится к автоматике и вычислительной технике и может быть использовано для удаления на бинарных изображениях шума в виде темных и светлых пятен и линий.
Цель изобретения - расширение области применения устройства за счет возможности устранения дефектов изображения в виде белых пятен и разры- 1 BOB линейных элементов изображения,
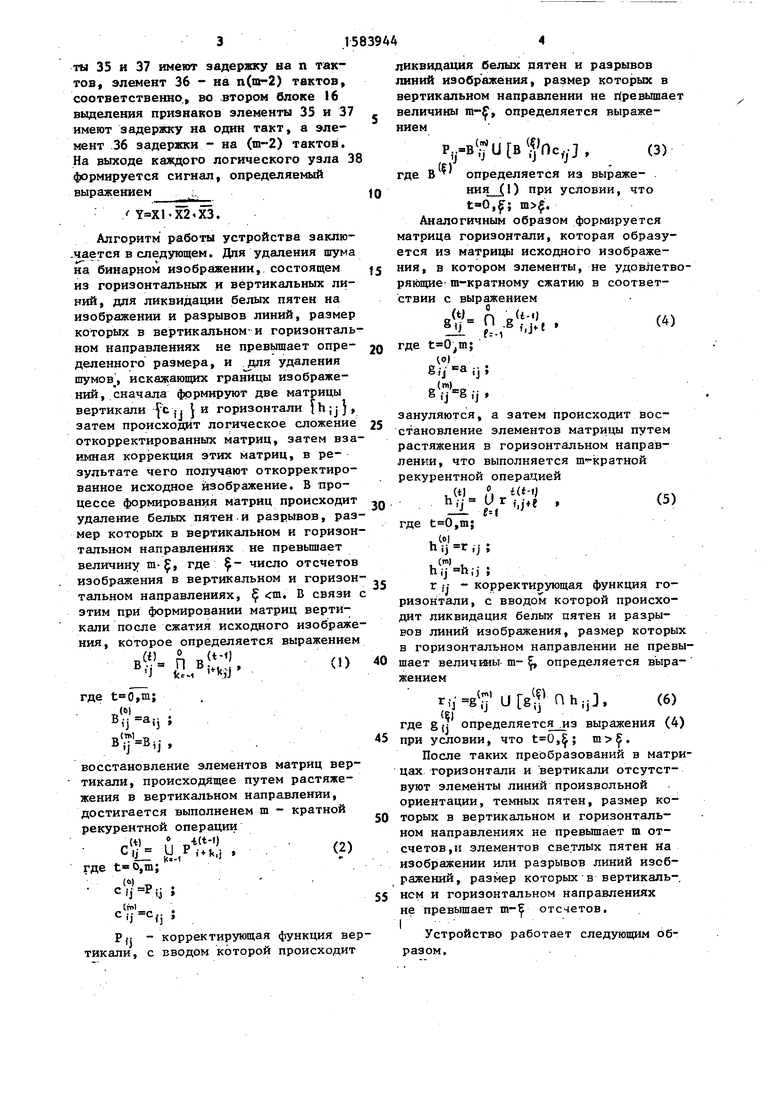
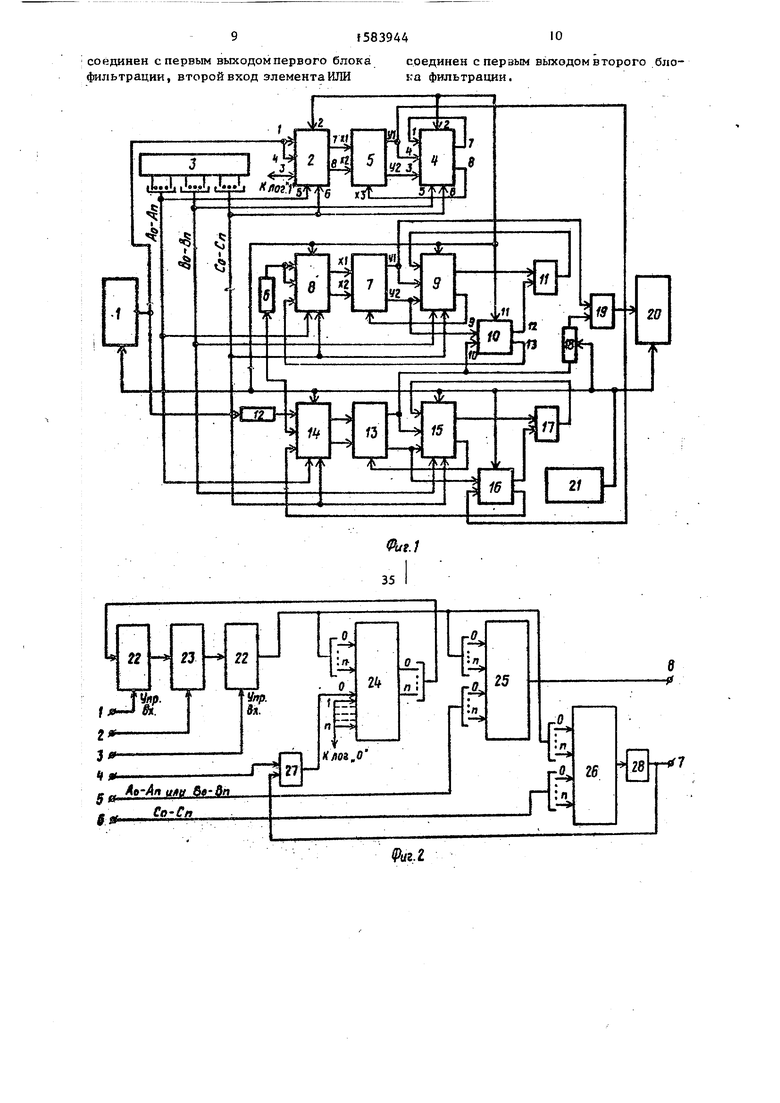
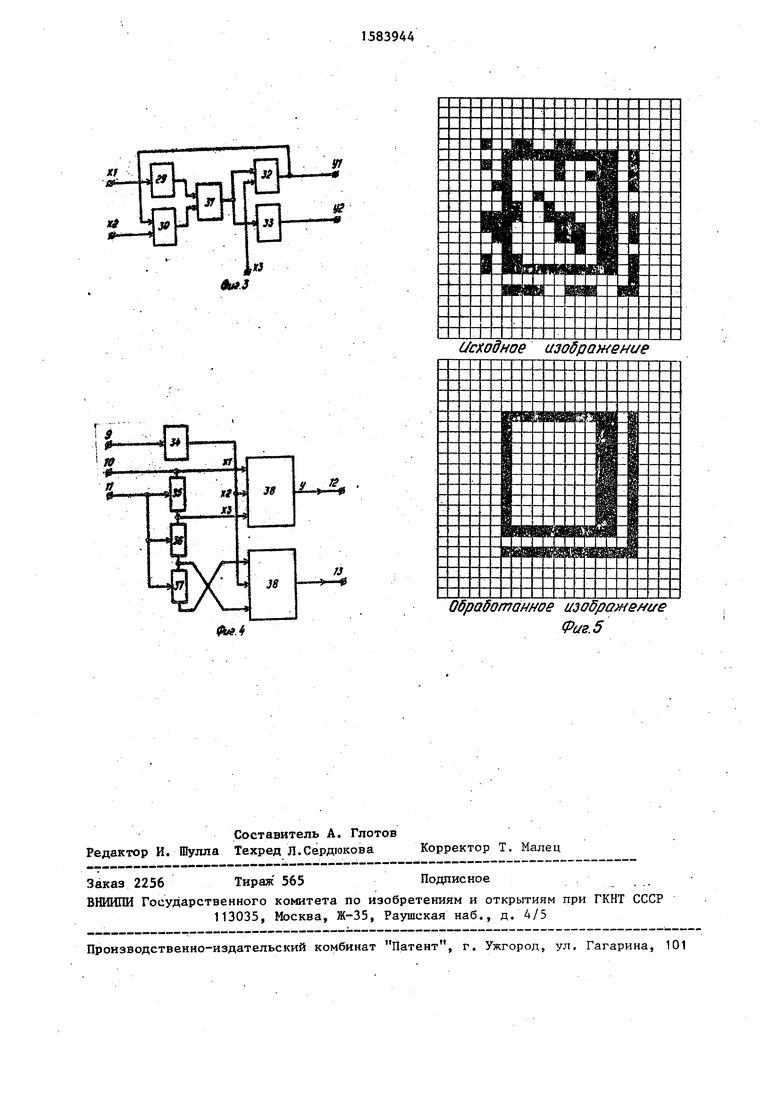
На фиг. 1 представлена схема устройства; на фиг. 2 - схема блока сжатия ; на фиг.3-4 - схемы блока фильтрации и выделения признаков; на фиг. 5 - схемы, поясняющие работу устройства.
Устройство ( фиг.1J содержит блок 1 ввода изображения, первый блок 2 сжатия , блок 3 задания кодов, второй блок 4 сжатия, первый блок 5 фильтрации, второй элемент 6 задержки, второй блок 7 фильтрации третий 8 и четвертый 9 блоки сжатий, первый блок 10
выделения признаков, первый элемент И 11, первый элемент 12 задержки,третий блок 13 фильтрации, пятый 14 и шестой 15 блоки сжатия, второй блок 16 выделения признаков, второй элемент И 17, третий элемент 18 задержки, элемент ИЛИ 19, блок 20 вывода изображения /блок 21 синхронизации.
Блок сжатия (фиг.2) содержит рва коммутатора 22, блок 23 задержек, сумматор 24, две схемы 25 и 26 сравнения, третий элемент И 27 и первый элемент НЕ 28.
Блок фильтрации (фиг.З) содержит второй элемент НЕ 29, четвертый элемент И 30, второй 31 и третий 32 элементы ИЛИ, третий элемент НЕ 33.
Блок выделения признаков (фиг.4) содержит четвертый элемент НЕ 34, четвертый 35, пятый 36 и шестой 37 элементы задержки, два логических узла 38, причем в первом блоке 10 (фиг.1) выделения признаков элемен(Л С
ел оо оо со
4 Ј
ты 35 и 37 имеют задержку на п тактов, элемент 36 - на n(m-2) тактов, соответственно, во втором блоке 16 выделения признаков элементы 35 и 37 имеют задержку на один такт, а элемент 36 задержки - на (та-2) тактов. На выходе каждого логического узла 38 формируется сигнал, определяемый выражением ..j Q
Y X1-X2«X3.
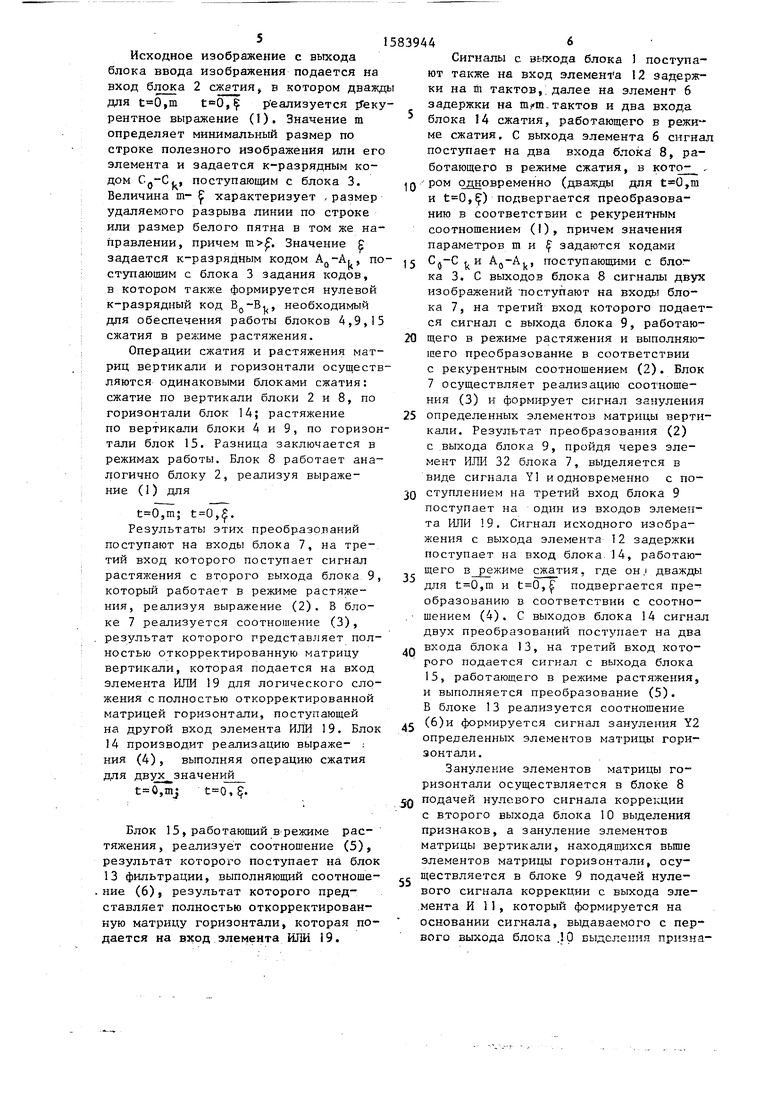
Алгоритм работы устройства заклю- .чается в следующем. Для удаления шума на бинарном изображении, состоящем $ из горизонтальных и вертикальных линий, для ликвидации белых пятен на изображении и разрывов линий, размер которых в вертикальном- и горизонтальном направлениях не превышает опре- 20 деленного размера, и для удаления шумов, искажающих границы изображений, сначала формируют две матрицы вертикали с {. к горизонтали fhjj}, затем происходит логическое сложение 25 откорректированных матриц, затем взаимная коррекция этих матриц, в результате чего получают откорректированное исходное изображение. В процессе формирования матриц происходит ,Q удаление белых пятен и разрывов, размер которых в вертикальном и горизонтальном направлениях не превышает величину т-Ј, где $- число отсчетов изображения в вертикальном и горизон- ,. тальном направлениях, § «он В связи с этим при формировании матриц вертикали после сжатия исходного изображения, которое определяется выражением ,) Ј )
ликвидация белых пятен и разрывов линий изображения, размер которых в вертикальном направлении не превышает величины тп-Ј, определяется выражением
,., где В(
(3)
определяется из выражения) при условии, что ,Ј; .
Аналогичным образом формируется матрица горизонтали, которая образуется из матрицы исходного изображения, в котором элементы, не удовлетворяющие m-кратному сжатию в соответствии с выражением
fl й(- LlL fs.,-8
где
to) gfjeaij
(га)
CT . eso .. б fj б ,j
зануляются, а затем происходит восстановление элементов матрицы путем растяжения в горизонтальном направлении, что выполняется т-кратной рекурентной операцией
(4)
. (t) hjjj
где ,m;
п (м
(5)
.Со)
Ь ij r ,j ;
. (m|
h,-j h;j ;
В -Г J1 J kr-i KjJ
r f.- - корректирующая функция горизонтали, с вводом которой происходит ликвидация белых пятен и разрывов линий изображения, размер которых в горизонтальном направлении не превы- (1) 40 шает величины т-, определяется выражением
ликвидация белых пятен и разрывов линий изображения, размер которых в вертикальном направлении не превыша величины тп-Ј, определяется выражением
,., где В(
(3)
определяется из выражения) при условии, что ,Ј; .
Аналогичным образом формируется матрица горизонтали, которая образуется из матрицы исходного изображения, в котором элементы, не удовлетряющие m-кратному сжатию в соответствии с выражением
fl й(- LlL fs.,-8
где
to) gfjeaij
(га)
CT . eso .. б fj б ,j
зануляются, а затем происходит восстановление элементов матрицы путем растяжения в горизонтальном направлении, что выполняется т-кратной рекурентной операцией
(4
. (t) hjjj
,m;
п (м
(5)
.Со)
Ь ij r ,j ;
. (m|
h,-j h;j ;
r f.- - кор нтали, с ликвидаци линий изо ризонталь величины ем
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции изображений | 1988 |
|
SU1583946A1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2011 |
|
RU2452012C1 |
| Устройство для коррекции изображений | 1985 |
|
SU1527646A1 |
| Устройство для считывания и кодирования изображений объектов | 1986 |
|
SU1548800A1 |
| Устройство для контроля дефектов фотошаблона | 1989 |
|
SU1698712A1 |
| Устройство для селекции дефектов изображений объектов | 1988 |
|
SU1631562A1 |
| Устройство для коррекции изображений | 1982 |
|
SU1167633A1 |
| Устройство для обработки и считывания изображений | 1989 |
|
SU1661809A1 |
| АССОЦИАТИВНЫЙ ВЫЧИСЛИТЕЛЬ СМЕЩЕНИЯ ЦЕНТРА ТЕКУЩЕГО ИЗОБРАЖЕНИЯ ОТ ЦЕНТРА ЭТАЛОННОГО | 1991 |
|
RU2029358C1 |
| Устройство формирования сигналов изображения | 1987 |
|
SU1483673A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах обработки изображения. Цель изобретения - расширение области применения устройства за счет возможности устранения дефектов изображения в виде белых пятен и разрывов линейных элементов изображения - достигается введением шести блоков сжатия, трех блоков фильтрации и блока задания кодов, что позволяет удалять на изображении шумы, искажающие границы изображения. 5 ил.
где ,m;
т(6
Bfj-a4 ;
W W1--R Bij Bij
восстановление элементов тикали, происходящее путе жения в вертикальном напр достигается выполненем m рекурентной операции
c L- у.,
где ,m; .
(ml
ctj-c{j ;
Pj: - корректирующая тикали, с вводом которой
(6)
5
0
5
,
где gj определяется из выражения (4) при условии, что ,; m.
После таких преобразований в матрицах горизонтали и вертикали отсутствуют элементы линий произвольной ориентации, темных пятен, размер которых в вертикальном и горизонтальном направлениях не превышает m отсчетов,и элементов светлых пятен на изображении или разрывов линий изображений, размер которых в вертикаль-, нем и горизонтальном направлениях не превышает т- отсчетов.
Устройство работает следующим образом.
Исходное изображение с выхода блока ввода изображения подается на вход блока 2 сжетия, в котором дважды для ,m ,$ реализуется рентное выражение (1), Значение m определяет минимальный размер по строке полезного изображения или его элемента и задается к-разрядным кодом С0-С, поступающим с блока 3. Величина т- Ј характеризует , размер удаляемого разрыва линии по строке или размер белого пятна в том же направлении, причем . Значение Ј задается к-разрядным кодом AQ-A, , поступающим с блока 3 задания кодов, в котором также формируется нулевой к-разрядный код BQ-B, необходимый для обеспечения работы блоков 4,9,15 сжатия в ре/шме растяжения.
Операции сжатия и растяжения матриц вертикали и горизонтали осуществляются одинаковыми блоками сжатия: сжатие по вертикали блоки 2 и 8, по горизонтали блок 14; растяжение по вертикали блоки 4 и 9, по горизонтали блок 15. Разница заключается в режимах работы. Блок 8 работает аналогично блоку 2, реализуя выражение (1) для
,m; ,Ј.
Результаты этих преобразований поступают на входы блока 7, на третий вход которого поступает сигнал растяжения с второго выхода блока 9, который работает в режиме растяжения, реализуя выражение (2). В блоке 7 реализуется соотношение (3), результат которого представляет полностью откорректированную матрицу вертикали, которая подается на вход элемента ИЛИ 19 для логического сложения с полностью откорректированной матрицей горизонтали, поступающей на другой вход элемента ИЛИ 19. Блок 14 производит реализацию выражения (4), выполняя операцию сжатия для двух значений
,mj ,$.
Блок 15, работающий в режиме растяжения, реализует соотношение (5), результат которого поступает на блок 13 фильтрации, выполняющий соотноше- ие (6), результат которого представляет полностью откорректированую матрицу горизонтали, которая поается на вход элемента ИЛИ 19.
0
0
5
Сигналы с выхода блока 1 поступают также на вход элемента 12 задержки на m тактов, далее на элемент 6 задержки на тактов и два входа блока 14 сжатия, работающего в режиме сжатия. С выхода элемента б сигнал поступает на два входа блока 8, работающего в режиме сжатия, в кото- , ром одновременно (дважды для ,m и ,) подвергается преобразованию в соответствии с рекурентным соотношением (1), причем значения параметров m и Ј задаются кодами 5 Сф-С и A0-Ak, поступающими с блока 3, С выходов блока 8 сигналы двух изображений поступают на входы блока 7, на третий вход которого подается сигнал с выхода блока 9, работающего в режиме растяжения и выполняющего преобразование в соответствии с рекурентным соотношением (2). Блок 7 осуществляет реализацию соотношения (3) и формирует сигнал зануления определенных элементов матрицы вертикали. Результат преобразования (2) с выхода блока 9, пройдя через элемент ИЛИ 32 блока 7, выделяется в виде сигнала Y1 и одновременно с поступлением на третий вход блока 9 поступает на один из входов элемента ИЛИ 19. Сигнал исходного изображения с выхода элемента 12 задержки поступает на вход блока 14, работающего в режиме сжатия, где он i дважды для ,m и ,Ј подвергается преобразованию в соответствии с соотношением (4). С выходов блока 14 сигнал двух преобразований поступает на два входа блока 13, на третий вход которого подается сигнал с выхода блока 15, работающего в режиме растяжения, и выполняется преобразование (5). В блоке 13 реализуется соотношение (6)и формируется сигнал зануления Y2 определенных элементов матрицы горизонтали.
Занулекие элементов матрицы горизонтали осуществляется в блоке 8 подачей нулевого сигнала коррекции с второго выхода блока 10 выделения признаков, а зануление элементов матрицы вертикали, находящихся выше элементов матрицы горизонтали, осуществляется в блоке 9 подачей нулевого сигнала коррекции с выхода элемента И 11, который формируется на основании сигнала, выдаваемого с первого выхода блока .10 выделения призна0
0
5
0
5
ков. Восстановление элементов матрицы } вертикали характеризующих корректируемые светлые пятна на исходном изображении, осуществляется в блоке 7
Аналогично зануление элементов матрицы горизонтали, находящихся левее элементов матрицы вертикали, осуществляется в блоке 14 подачей нулевого сигнала коррекции с выхода блока 16 выделение признаков. Зануление элементов матриц горизонтали, находящихся правее элементов матриц вертикали, осуществляется в блоке 15 подачей нулевого сигнала коррекции с вы- хода элемента И 17, который формируется сигналом, подаваемым с первого выхода блока 16 выделения признаков. Восстановление элементов матрицы горизонтали, характеризующих корректируемые светлые пятна на исходном изображении или разрывы линий, осуществляется в блоке 13.
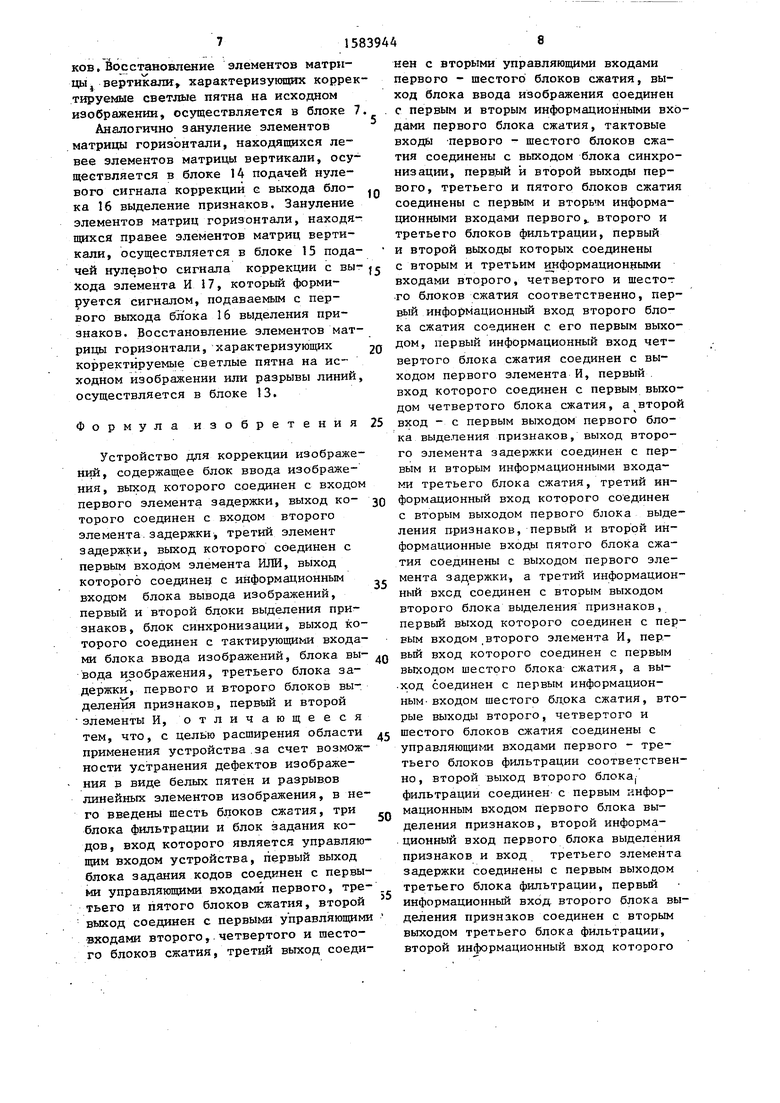
Формула изобретения
Устройство для коррекции изображений, содержащее блок ввода изображения , выход которого соединен с входом первого элемента задержки, выход которого соединен с входом второго элемента задержки, третий элемент задержки, выход которого соединен с первым входом элемента ИЛИ, выход которого соединен с информационным входом блока вывода изображений, первый и второй блоки выделения признаков, блок синхронизации, выход которого соединен с тактирующими входами блока ввода изображений, блока вы- Q вый вход которого соединен с
вода изображения, третьего блока задержки, первого и второго блоков выделения признаков, первый и второй элементы И, отличающееся тем, что, с целью расширения области применения устройства за счет возможности устранения дефектов изображения в виде белых пятен и разрывов линейных элементов изображения, в него введены шесть блоков сжатия, три блока фильтрации и блок задания кодов, вход которого является управляющим входом устройства, первый выход блока задания кодов соединен с первыми управляющими входами первого, третьего и пятого блоков сжатия, второй выход соединен с первыми управляющими входами второго, четвертого и шестого блоков сжатия, третий выход соеди45
50
55
выходом шестого блока сжатия ход соединен с первым информа ным- входом шестого блока сжат рые выходы второго, четвертог шестого блоков сжатия соедине управляющими входами первого тьего блоков фильтрации соотв но, второй выход второго блок фильтрации соединен с первым мационным входом первого блок деления признаков, второй инф ционный вход первого блока вы признаков и вход третьего э задержки соединены с первым в третьего блока фильтрации, пе информационный вход второго б деления признаков соединен с выходом третьего блока фильтр второй информационный вход ко
j
5
0
5
нен с вторыми управляющими входами первого - шестого блоков сжатия, выход блока ввода изображения соединен с первым и вторым информационными входами первого блока сжатия, тактовые входы -первого - шестого блоков сжатия соединены с выходом блока синхронизации, перв.ый и второй выходы первого, третьего и пятого блоков сжатия соединены с первым и вторым информационными входами первого,, второго и третьего блоков фильтрации, первый и второй выходы которых соединены с вторым и третьим информационными входами второго, четвертого и шестот го блоков сжатия соответственно, первый информационный вход второго блока сжатия соединен с его первым выходом, первый информационный вход четвертого блока сжатия соединен с выходом первого элемента И, первый вход которого соединен с первым выходом четвертого блока сжатия, а второй вход - с первым выходом первого блока выделения признаков, выход второго элемента задержки соединен с первым и вторым информационными входами третьего блока сжатия, третий информационный вход которого соединен с вторым выходом первого блока выделения признаков, первый и второй информационные входы пятого блока сжатия соединены с выходом первого элемента задержки, а третий информационный вход соединен с вторым выходом второго блока выделения признаков, первьй выход которого соединен с первым входом второго элемента И, перQ вый вход которого соединен с
первым а вы5
0
5
выходом шестого блока сжатия ход соединен с первым информационным- входом шестого блока сжатия, вторые выходы второго, четвертого и шестого блоков сжатия соединены с управляющими входами первого - третьего блоков фильтрации соответственно, второй выход второго блока, фильтрации соединен с первым информационным входом первого блока выделения признаков, второй информационный вход первого блока выделения признаков и вход третьего элемента задержки соединены с первым выходом третьего блока фильтрации, первый информационный вход второго блока выделения признаков соединен с вторым выходом третьего блока фильтрации, второй информационный вход которого
соединен с первым выходом первого блока соединен с первым выходом второго бло- фильтрации, второй вход элемента ИЛИ ка фильтрации.
Фи.1 35
Jtf
AtfJ
X-A
исходное изображение
Обработанное изображение Фиг. 5
| Устройство для коррекции изображений | 1982 |
|
SU1059585A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для коррекции изображений | 1985 |
|
SU1527646A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
