Область техники
Настоящее изобретение относится к устройству и способу для управления гибридным двигателем, а более конкретно к устройству и способу для управления гибридным двигателем, в котором в роторе вместо катушки индуктивности используется постоянный магнит, обмотка наматывается вокруг статора и выполнена в виде многофазных независимых параллельных секций, на роторе установлен кодовый датчик положения выпрямительного типа, а сенсорный датчик соединен со схемой запуска для плавного старта и вращения гибридного двигателя. А также настоящее изобретение относится к устройству и способу для управления гибридным двигателем, в котором его конфигурация упрощена, и таким образом снижена стоимость изготовления гибридного двигателя.
Предшествующий уровень техники
Обычный двигатель постоянного тока сконструирован так, что катушка индуктивности наматывается вокруг ротора, имея соответствующее количество полюсов, а обмотка со щеткой наматывается вокруг статора. В обычном двигателе постоянного тока необходима замена щетки из-за короткого замыкания или абразивного износа сегментных стержней.
Кроме того, в обычном двигателе переменного тока, постоянного тока и в двигателе постоянного тока малой мощности без щеток контроллеры для управления работой таких двигателей установлены интегрально с двигателями, и таким образом изготовление, ремонт и обслуживание таких двигателей затруднено. Контроллер обычного двигателя переменного тока имеет большие размеры. Он дорогостоящ и труден в управлении, так как осуществляет управление низкоамперным током высокого напряжения. Контроллер обычного двигателя постоянного тока осуществляет управление большим током низкого напряжения, поэтому он сложен в изготовлении из-за явления кругового искрения двигателя постоянного тока. Кроме того, переключающие элементы контроллера обычного двигателя постоянного тока дорогостоящи из-за того, что контроллер осуществляет управление током большой силы. Кроме того, так как обычные двигатели генерируют скачки напряжения, реактивность, гармоники и т.п., контроллеры обычных двигателей сложны в конструировании и дорогостоящи.
Кроме того, контроллеры обычного интегрального типа не могут работать самостоятельно из-за характеристик двигателей, и таким образом система, использующая обычный двигатель, не работает, когда двигатель или его контроллер не в норме, и аварийный режим системы не может быть осуществлен.
Кроме того, способ управления обычным двигателем предполагает синусоидальный сигнал, сигнал прямоугольной или трапецеидальной формы, чтобы генерировать противоэлектродвижущую силу, когда запускается и останавливается двигатель, поэтому конструирование и управление контроллером такого двигателя затруднено. Кроме того, при протекании тока через контроллер возникает короткое замыкание в ветви цепи переключающих элементов (переключающие элементы включаются одновременно, вызывая короткое замыкание, которое разрушает переключающие элементы). В целях предотвращения этого необходимо иметь цепь защиты от перекрестного влияния с использованием аппаратных управляющих устройств или программных средств.
Кроме того, способ управления обычным двигателем предполагает одновременное включение и выключение переключающих элементов на верхней и нижней ступенях двигателя. Когда переключающие элементы одновременно отключаются, на обмотке двигателя остается остаточное напряжение (явление гистерезиса). Это остаточное напряжение и входное напряжение вызывают аварийное явление в виде скачка напряжения при включении переключающих элементов. Во избежание этого предусматривается схема с использованием аппаратных управляющих устройств или программных средств, что ведет к увеличению размеров привода, усложнению управления двигателем и удорожанию контроллера.
Кроме того, способ управления обычным двигателем не требует синхронизации, так как в нем не используется электронный двигатель (используется способ управления замкнутым контуром для линейного управления или стабилизации оборотов). Кроме того, линейное управление трудно в осуществлении, а для стабилизации оборотов при управлении обычным двигателем требуется высококачественный алгоритм. Кроме того, двигатель постоянного тока малой мощности без щеток приводится в действие сенсорным сигналом, так как он является электронным двигателем. Однако в двигателе постоянного тока малой мощности без щеток в качестве способа соединений используется соединение по схеме звезда и по схеме треугольник с тем, чтобы скорость оборотов двигателя контролировалась с использованием обычного способа управления двигателем переменного тока. Таким образом, регулировать скорость вращения в двигателе постоянного тока малой мощности без щеток трудно.
Раскрытие изобретения
Техническая задача
Таким образом, для решения вышеназванных проблем, существующих в предшествующем уровне техники, было создано изобретение, основной целью которого является создание устройства и способа для управления гибридным двигателем, в котором в роторе вместо катушки индуктивности используется постоянный магнит, обмотка намотана вокруг статора и выполнена в виде многофазных независимых параллельных секций, на роторе установлен кодовый датчик положений выпрямительного типа, а сенсорный датчик соединен со схемой запуска для плавного старта и вращения гибридного двигателя.
Другой целью изобретения является создание устройства и способа для управления гибридным двигателем, которое может упростить конфигурацию гибридного двигателя и таким образом снизить стоимость изготовления гибридного двигателя.
Еще одной целью настоящего изобретения является создание устройства и способа для управления гибридным двигателем, которое предусматривает модуль для управления работой гибридного двигателя таким образом, чтобы этот модуль мог осуществлять независимое управление для каждой фазы двигателя и быть съемным для своей замены на новый в случае выхода из строя, обеспечивая таким образом простоту изготовления, ремонта и обслуживания гибридного двигателя.
Техническое решение
Для достижения вышеназванных целей в соответствии с одним аспектом настоящего изобретения создано устройство для управления гибридным двигателем, имеющим многофазную обмотку статора, выполненную в виде независимых параллельных секций, содержащее: кодовый датчик положений, установленный на роторе гибридного двигателя и работающий совместно с сенсорным датчиком для определения полюса ротора; сенсорный датчик для вывода сенсорного сигнала, обозначающего полюс ротора, считываемого кодовым датчиком положения; входной узел для регулирования скорости, генерирующий сигнал задания скорости для запуска двигателя; цепь силовых переключений для генерирования сигналов для запуска двигателя; модуль привода для приема сигнала задания скорости и сенсорного сигнала и вывода сигнала задания скорости, синхронизированного с сенсорным сигналом, в качестве управляющего сигнала на привод двигателя; источник питания для подачи тока постоянного напряжения в цепь силовых переключений; и логический источник питания для преобразования постоянного напряжения, получаемого от источника питания, в логическое напряжение и для использования преобразованного логического напряжения в модуле привода. Если в двигателе имеется n-е число фаз, то двигатель имеет n-е число цепей силовых переключений и n-е число модулей привода.
Модуль привода включает в себя: процессор для приема сигнала задания скорости и сенсорного сигнала и вывода сигнала задания скорости, синхронизированного сенсорным сигналом; логическое устройство на интегральных схемах для объединения сигнала задания скорости и сенсорного сигнала и вывода управляющего сигнала на привод двигателя; и запускающее устройство для получения сигнала привода двигателя от логического устройства и вывода сигналов для запуска цепи силовых переключений.
Двигатель включает обмотку, выполненную в виде многофазных независимых параллельных секций, а секции, соответствующие различным фазам, имеют одинаковое состояние возбуждения.
Источник питания имеет конфигурацию полной схемы мостового преобразователя и преобразует напряжение переменного тока в напряжение постоянного тока.
Логический источник питания преобразует напряжение постоянного тока, получаемое от источника питания, в логическое напряжение с использованием преобразователя постоянного тока.
Кодовый датчик положений имеет светоэкранирующую часть и световоспринимающую часть, расположенные на пластине датчика.
Процессор преобразует сигнал задания скорости в форме аналогового сигнала в цифровой сигнал с помощью имеющегося в нем аналого-цифрового преобразователя и выводит цифровой сигнал задания скорости каждый раз при входе сенсорного сигнала.
Цепь силовых переключений имеет конфигурацию мостовой схемы Н, включающую в себя первый, второй, третий и четвертый переключающие элементы. Первый, второй, третий и четвертый переключающие элементы предпочтительно используют один из следующих транзисторов: биполярный транзистор с изолированным затвором и полевой транзистор со структурой метал-оксид-полупроводник.
Обмотка статора гибридного двигателя выполнена в виде независимых параллельных секций.
Для достижения вышеназванных целей в соответствии с другим аспектом настоящего изобретения также предлагается способ управления гибридным двигателем, включающий преобразование напряжения переменного тока в напряжение постоянного тока, использование постоянного тока в гибридном двигателе, преобразование напряжения постоянного тока в логическое напряжение и использование преобразованного логического напряжения в гибридном двигателе; ввод сигнала задания скорости двигателя; преобразование сигнала задания скорости в цифровой сигнал, объединение цифрового сигнала задания скорости и сенсорного сигнала и выведение сигнала задания скорости, синхронизированного с сенсорным сигналом; объединение сигнала задания скорости с сенсорным сигналом и выведение сигналов для запуска верхней и нижней ступеней двигателя; генерирование сигналов для запуска двигателя, используя сигналы для запуска верхней и нижней ступеней двигателя; вращение двигателя, используя управляющие сигналы для запуска двигателя; и генерирование сенсорного сигнала, обозначающего полюс ротора двигателя и позволяющего возвратиться на этап преобразования сигнала задания скорости двигателя в цифровой сигнал, чтобы вновь произвести преобразование сигнала задания скорости двигателя в цифровой сигнал.
В двигателе используется гибридный модуль управления, включающий в себя процессор для приема сигнала задания скорости и сенсорного сигнала и выведения сигнала задания скорости, синхронизированного с сенсорным сигналом; логическое устройство на интегральных схемах для объединения сигнала задания скорости и сенсорного сигнала и выведения управляющих сигналов на привод двигателя; и запускающее устройство для приема управляющих сигналов на привод двигателя от логического устройства и выведения сигналов для запуска цепи силовых переключений.
Соответственно, для ротора вместо катушки индуктивности используется постоянный магнит, обмотка наматывается вокруг статора и выполняется в виде многофазных независимых параллельных секций, на роторе установлен кодовый датчик положений выпрямительного типа, а в схеме запуска двигателя имеется сенсорный датчик плавного старта и вращения гибридного двигателя.
Преимущества
Устройство и способ для управления гибридным двигателем согласно настоящему изобретению может снизить силовую нагрузку, распределяя ее между фазами (n-1) и контролируя распределенную силовую нагрузку во время привода гибридного двигателя. Согласно настоящему изобретению предусмотрена мостовая схема Н для каждой фазы, таким образом, увеличивается число переключающих элементов. Однако в гибридном двигателе пропускная способность переключающего элемента может быть уменьшена за счет распределительного управления (снижая токовую нагрузку цепи до (n-1) фаз) по сравнению с пропускной способностью переключающего элемента той же категории. Соответственно, может быть снижена стоимость переключающих элементов.
Кроме того, гибридный двигатель согласно настоящему изобретению содержит независимые схемы запуска для соответствующих фаз путем встраивания контроллера в модуль. Таким образом, даже если какая-нибудь фаза гибридного двигателя находится не в норме, двигатель может работать через другие нормальные фазы (т.е. возможна работа в аварийном режиме). Более того, независимые контроллеры для соответствующих фаз сконструированы так, что, когда один контроллер выходит из строя, это не влияет на другие контроллеры.
Кроме того, напряжение (постоянного тока) подается на двигатель способом частичного подвода тока, таким образом, благодаря неактивному периоду между положительным и отрицательным периодами при переключении, предотвращается перекрестное влияние (короткое замыкание в ветвях цепи переключающих элементов). Поэтому нет необходимости в цепи защиты от перекрестного влияния с использованием аппаратных управляющих устройств или программных средств. Таким образом, электрический ток отсутствует, когда двигатель запускается и останавливается, а проходит он только тогда, когда двигатель работает, то есть противоэлектродвижущая сила не генерируется.
Кроме того, настоящее изобретение может устранять скачки напряжения и реактивность, возникающие при включении и выключении двигателя. Поэтому размеры привода двигателя могут быть уменьшены по сравнению с приводом обычного двигателя переменного или постоянного тока.
Кроме того, с помощью настоящего изобретения легко осуществляется линейное управление и контроль постоянства скорости гибридного двигателя за счет синхронизации сенсорного сигнала полюса и сигнала задания скорости широтно-импульсной модуляции и контроль над положением двигателя, так как отсутствует изменение частоты вращения.
Более того, регулирование скорости осуществляется с использованием метода регулирования напряжения при низкой частоте, таким образом можно снизить шум при переключении.
Кроме того, число фаз статора и число полюсов ротора может быть уменьшено или увеличено по необходимости, а форма статора и ротора конструируются свободно: плоской формы, с ротором внутри, ротором снаружи или линейной формы. Соответственно возможно конструирование и изготовление различных двигателей для различных целей.
Краткое описание фигур чертежей
Фиг.1 - конфигурация устройства для управления гибридным двигателем в соответствии с настоящим изобретением;
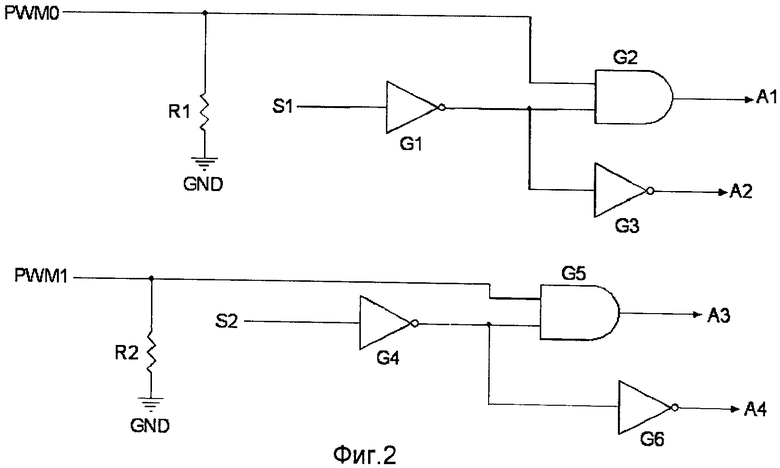
фиг.2 - принципиальная схема логического узла 123, показанного на фиг.1;
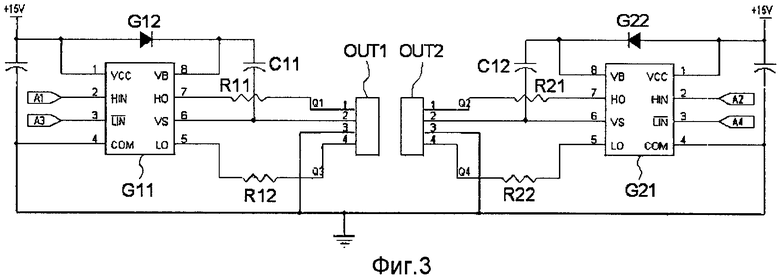
фиг.3 - принципиальная схема узла запуска 125, показанного на фиг.1;
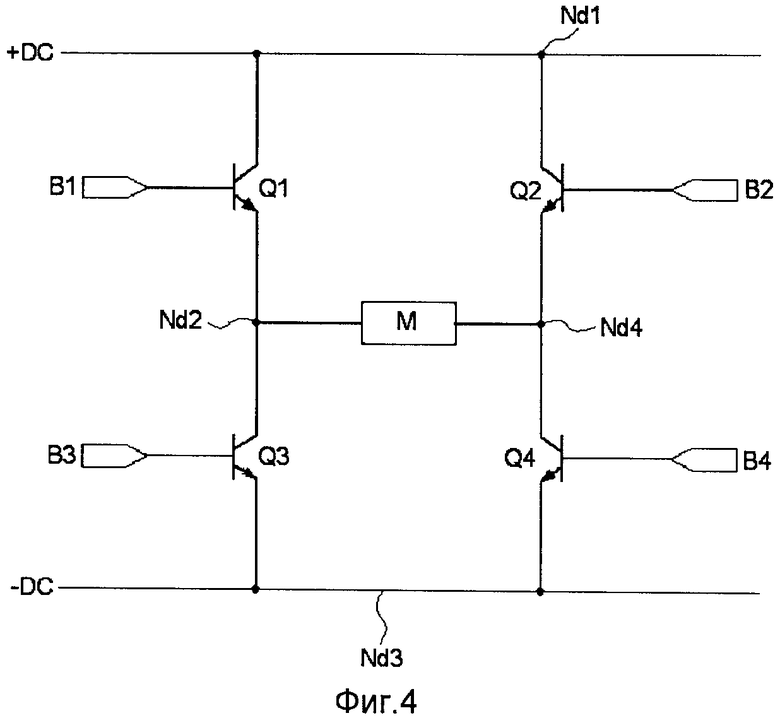
фиг.4 - принципиальная схема цепи 110 силовых переключений, показанной на фиг.1;
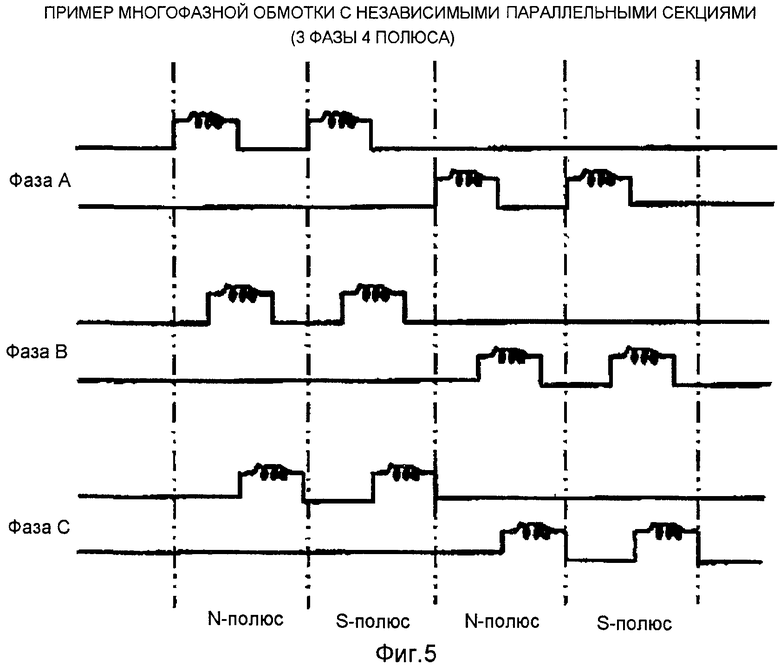
фиг.5 - трехфазная четырехполюсная обмотка статора гибридного двигателя согласно одному из вариантов осуществления настоящего изобретения; и
фиг.6 - блок-схема способа управления многофазным бесщеточным двигателем постоянного тока в соответствии с настоящим изобретением.
Ссылки на основные детали на чертежах: 10 - ротор; 20 - кодовый датчик положения выпрямительного типа; 30 - сенсорный датчик; 40 - источник питания; 50 - логический источник питания; 60 - входное устройство скорости; 70 - статор; 100 - модуль управления; 110 - цепь силовых переключений; 120 - модуль привода; 121 - процессор; 123 - логическое устройство; 125 - узел запуска.
Лучший вариант осуществления изобретения
Ниже приводится более полное описание настоящего изобретения, в котором показаны примеры осуществления изобретения со ссылками на прилагаемые чертежи. Изобретение, однако, может быть осуществлено во многих других формах, и его конструкция не должна ограничиваться вариантами, приведенными здесь.
А эти варианты приводятся для того, чтобы раскрытие изобретения было полным и завершенным и в полной мере передавало суть изобретения для специалистов в этой области. Одинаковые цифры на чертежах обозначают одинаковые элементы, и поэтому их описание будет опущено.
Другие цели и преимущества изобретения могут быть легче поняты из следующего подробного описания со ссылками на прилагаемые чертежи.
Гибридный двигатель и контроллер (управляющее устройство)
На фиг.1 показана конфигурация устройства для управления гибридным двигателем в соответствии с настоящим изобретением. Как показано на фиг.1, устройство для управления гибридным двигателем включает в себя статор 70, ротор 10, кодовый датчик положения 20 и сенсорный датчик 30, связанный с ротором 10, источник питания 40, логический источник питания 50, входное устройство скорости 60, процессор 121, модуль привода 120, состоящий из процессора 121, логического устройства 123 и узла запуска 125, и модуль управления 100, состоящий из модуля привода 120 и цепи силовых переключений 110. Если в двигателе n-е число фаз, то устройство для управления гибридным двигателем содержит n-е число модулей управления 100.
Статор 70 гибридного двигателя имеет конфигурацию якоря, а ротор 10 - постоянного магнита. Ротор может быть многополюсным, например, 2-полюсным, 4-полюсным, 6-полюсным, …, 2n-полюсным, а статор может быть многофазным, например, 2-фазным, 3-фазным, 4-фазным, 6-фазным, …, N-фазным. Соответственно, количество полюсов или фаз гибридного двигателя при необходимости может быть легко увеличено или уменьшено, а длина, толщина и форма гибридного двигателя могут быть легко изменены при необходимости.
Предпочтительно, чтобы двигатель имел обмотку, выполненную в виде многофазных независимых параллельных секций, а секции, соответствующие различным фазам, имели одинаковое состояние возбуждения.
Кодовый датчик положения 20, установленный на роторе 10 гибридного двигателя, соединен с осью гибридного двигателя и работает совместно с сенсорным датчиком 30, чтобы определять полюс ротора 10 гибридного двигателя. Кодовый датчик положения 20 имеет светоэкранирующую часть (не показана) и световоспринимающую часть (не показана), сформированные на пластине кодового датчика положения, чтобы определять положение ротора 10. Это позволяет кодовому датчику положения 20 контролировать импульс возбуждения гибридного двигателя и делает возможным ввод входного сигнала гибридного двигателя в качестве частичного импульса.
Сенсорный датчик 30 выводит сигнал, показывающий положение полюса ротора 10 гибридного двигателя, который считывается кодовым датчиком положения 20, на логическое устройство 123 и процессор 121. Предпочтительным вариантом исполнения сенсорного датчика 30 является фотодатчик.
Источник питания 40 имеет конфигурацию полной схемы мостового преобразователя и, таким образом, напрямую подает напряжение постоянного тока к логическому источнику питания 50 и цепи силовых переключений 110, когда подводится напряжение постоянного тока, а когда подводится напряжение переменного тока, он преобразует его в напряжение постоянного тока и подает напряжение постоянного тока на логический источник питания 50 и цепь силовых переключений 110. Настоящее изобретение может управлять скоростью гибридного двигателя путем регулирования напряжения источника питания 40.
Логический источник питания 50 преобразует напряжение постоянного тока, получаемое от источника питания 40, в логическое напряжение с использованием преобразователя постоянного тока для того, чтобы использовать напряжение постоянного тока в качестве логического напряжения. Логическое напряжение подается на модуль привода 120.
Входное устройство скорости 60 вводит сигнал задания скорости для гибридного двигателя. Входное устройство скорости 60 использует цифровой ключ или аналоговый ключ и подает сигнал задания скорости в виде аналогового сигнала на аналого-цифровой преобразователь (не показан) процессора 121.
Модуль управления 100 включает цепь силовых переключений 110 и модуль привода 120, а модуль привода 120 включает процессор 121, логическое устройство 123 и узел запуска 125, как описано выше.
Процессор 121 преобразует аналоговый сигнал задания скорости в цифровой сигнал с помощью содержащегося в нем аналого-цифрового преобразователя (не показан), принимает сенсорный сигнал от датчика 30 и выдает цифровой сигнал задания скорости, как только подается сенсорный сигнал. Сигнал задания скорости, синхронизированный с сенсорным сигналом, подается на логическое устройство 123 и осуществляется линейное управление и контроль постоянства скорости гибридного двигателя.
Логическое устройство 123 на интегральных схемах объединяет сигнал задания скорости, полученный от процессора, и сенсорный сигнал, полученный от датчика 30, и выдает сигналы для запуска двигателя.
Для достижения этого логический узел 123 включает в себя инверторы G1, G3, G4 и G6 и логические элементы И G2 и G5, как показано на фиг.2. Логический элемент И G2 получает широтно-импульсномодулированный сигнал задания скорости PWM0 от процессора 121 и сенсорный сигнал S1 от датчика 30 через инвертор G1, осуществляет логическую операцию И над сигналом задания скорости PWMO и сенсорным сигналом S1 и выдает результирующий сигнал А1. Инвертор G3 получает выходной сигнал инвертора G1, инвертирует его и выдает инвертированный сигнал А2. Логический элемент И G5 получает широтно-импульсномодулированный сигнал задания скорости PWM1 от процессора 121 и сенсорный сигнал S2 от датчика 30 через инвертор G4 и осуществляет логическую операцию И над сигналом задания скорости PWM1 и сенсорным сигналом S2 и выдает результирующий сигнал A3. Инвертор G6 получает выходной сигнал инвертора G4, инвертирует его и выдает инвертированный сигнал А4.
Узел запуска 125 получает сигналы привода двигателя А1, А2, A3, и А4 от логического узла 123 и выдает сигналы для приведения в действие цепи силовых переключений 110.
Как показано на фиг.3, узел запуска 125 включает в себя первый кристалл ИС G11, который получает от логического узла 123 сигналы А1 и A3 для запуска двигателя и выдает сигналы В1 и В3 для срабатывания переключающих элементов Q1 и Q3 цепи силовых переключений 110, и второй кристалл ИС G21, который получает от логического узла 123 сигналы А2 и А4 запуска двигателя и выдает сигналы В2 и В4 для срабатывания переключающих элементов Q2 и Q4 цепи силовых переключений 110.
Цепь силовых переключения 110 генерирует сигналы для запуска гибридного двигателя и имеет конфигурацию мостовой схемы Н, включающую в себя первый, второй, третий и четвертый переключающие элементы Q1, Q2, Q3 и Q4, как показано на фиг.4. Предпочтительно, чтобы первый, второй, третий и четвертый переключающие элементы Q1, Q2, Q3 и Q4 использовали следующие транзисторы: биполярные транзисторы с изолированным затвором и полевые транзисторы со структурой метал-оксид-полупроводник.
Если гибридный двигатель - это многофазный двигатель, устройство для управления гибридным двигателем включает n-е число модулей управления 100, каждый из которых имеет цепи силовых переключений 110 и модуль привода 120.
3-фазная 4-полюсная обмотка статора гибридного двигателя.
На фиг.5 показана 3-фазная 4-полюсная обмотка статора гибридного двигателя в соответствии с одним из вариантов настоящего изобретения.
Обмотка статора гибридного двигателя формирует полюса (N-полюс и S-полюс) в силу того, что приход тока в паз обмотки отличается от его выхода из паза обмотки, и коррелирует с полюсом ротора для генерирования вращающего момента.
Способ управления многофазным бесщеточным двигателем постоянного тока.
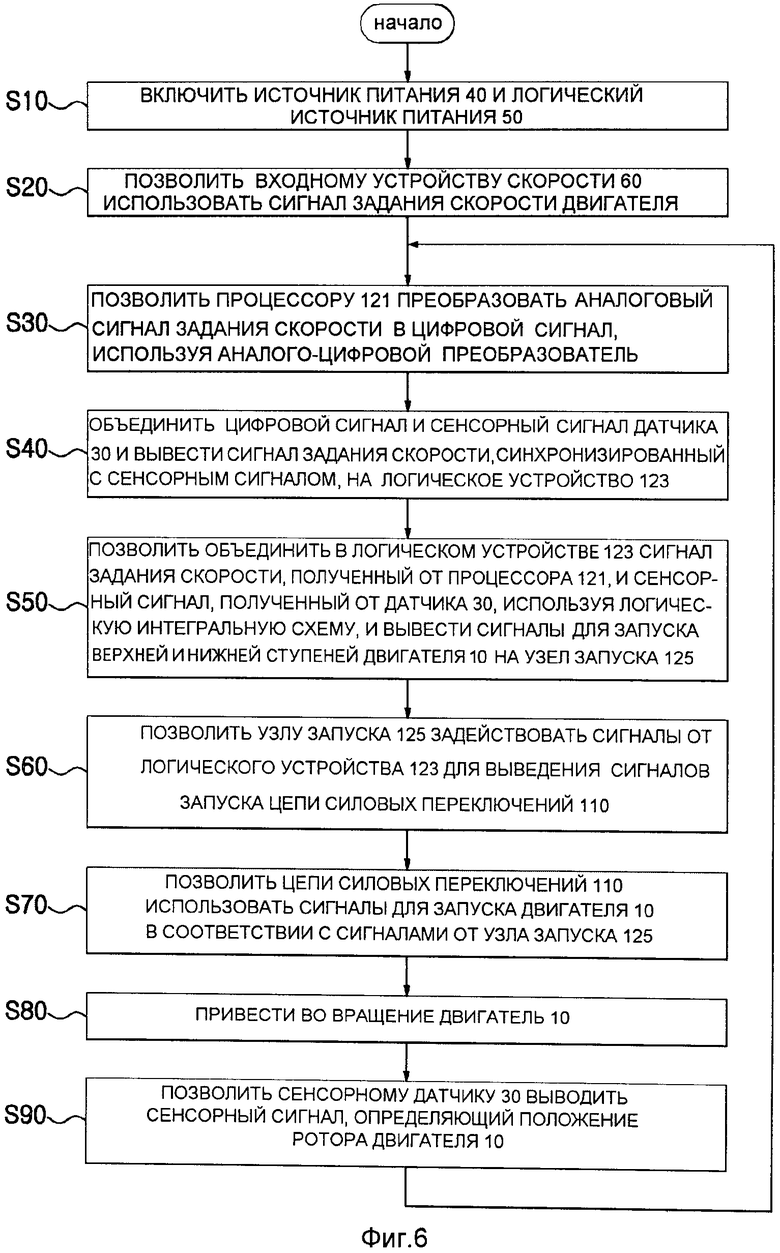
На фиг.6 показана блок-схема способа управления многофазным бесщеточным двигателем постоянного тока в соответствии с настоящим изобретением. Как показано на фиг.1-6, источник питания 40 преобразует напряжение переменного тока в напряжение постоянного тока и подает напряжение постоянного тока на логический источник питания 50 и цепь силовых переключений 110, а логический источник питания 50 преобразует напряжение постоянного тока в логическое напряжение и подает логическое напряжение на модуль привода 120 в операции S10.
Затем входное устройство скорости 60 вводит сигнал задания скорости гибридного двигателя в процессор 121 модуля привода в операции S20.
Процессор 121 преобразует сигнал задания оборотов в цифровой сигнал в операции S30, объединяет сигнал задания скорости и сенсорный сигнал, полученный от датчика 30, и выдает сигнал задания скорости, синхронизированный с сенсорным сигналом, на логический узел 123 в операции S40.
Логический узел 123 объединяет сигнал задания скорости, полученный от процессора 121, и сенсорный сигнал, полученный от датчика 30, и выдает сигналы для запуска верхней и нижней ступеней гибридного двигателя на узел запуска 125 в операции S50.
Узел запуска 125 проводит сигналы для привода верхней и нижней ступеней гибридного двигателя и выдает сигналы для запуска цепи силовых переключений 110 в операции S60.
Цепь силовых переключений 110 задействуется сигналами, полученными от узла запуска 125, и выдает сигналы для запуска гибридного двигателя в операции S70.
Сигналы, снимаемые с цепи силовых переключений 110, вращают ротор 10 в операции S80.
Сенсорный датчик 30 выдает сенсорный сигнал, обозначающий полюс ротора 10 гибридного двигателя, на процессор 121 и логическое устройство 123 для управления ротором 10 в операции S90.
Как описано выше, устройство для управления многофазным бесщеточным двигателем постоянного тока объединяет сенсорный сигнал, обозначающий полюс ротора, считываемый датчиком 30, и сигнал задания скорости, вводимый входным узлом скорости 60, для генерирования сигнала задания скорости, синхронизированного с сенсорным сигналом, и генерирует сигнал управления двигателем с использованием сигнала задания скорости для привода в действие гибридного двигателя. В результате, через секции многофазной обмотки гибридного двигателя течет прямоугольно-импульсный переменный ток для плавного привода гибридного двигателя.
Гибридный двигатель согласно настоящему изобретению включает в себя якорь в качестве статора и постоянный магнит в качестве ротора. Вообще, если в качестве обмотки статора используется соленоидная катушка, то двигатель генерирует синусоидальные колебания вращательного момента. Соответственно, в настоящем изобретении обмотка статора намотана в виде независимых параллельных многофазных секций, так что подходит для приводного двигателя, генерирующего трапецеидальные колебания вращающего момента. Кроме того, настоящее изобретение минимизирует потери в обмотке катушки возбуждения и повышает КПД двигателя за счет биполярности. Кроме того, настоящее изобретение повышает эффективность использования секций обмотки за счет многофазности (например, 2-фазное 1-полюсное возбуждение, 3-фазное 2-полюсное возбуждение, 4-фазное 3-полюсное возбуждение, 5-фазное 4-полюсное возбуждение, n-фазное (n-1)-полюсное возбуждение, n-фазное (n-2)-полюсное возбуждение, и т.д.), что позволяет сделать конструкцию компактной и улучшить показания по колебаниям при вращении. В дополнение, настоящее изобретение содержит просто и надежно встроенные кодовый датчик положения и сенсорный датчик для улучшения характеристик пуска и вращения двигателя. Кроме того, настоящее изобретение представляет собой двигатель простой конструкции, что снижает стоимость изготовления двигателя.
Хотя настоящее изобретение было описано со ссылкой на конкретные иллюстрированные фигурами чертежей варианты осуществления, оно не ограничивается этими вариантами, а ограничивается только прилагаемой формулой изобретения. Понятно, что специалисты в этой области могут изменять или модифицировать варианты осуществления изобретения не отходя от сущности и объема охраны настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным двигателем и устройство для его осуществления | 1979 |
|
SU807973A1 |
| ПРИВОД ВРАЩЕНИЯ ВОЛНОВОДНО-ЩЕЛЕВОЙ АНТЕННЫ | 2011 |
|
RU2458435C1 |
| СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА ФОРМИРОВАНИЕМ В ЭЛЕКТРОПРИВОДЕ ЧАСТОТНО-РЕГУЛИРУЕМОГО СИГНАЛА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2006 |
|
RU2326775C2 |
| Тяговый инвертор электрогрузовика | 2024 |
|
RU2825486C1 |
| Электропривод переменного тока | 1985 |
|
SU1272460A1 |
| СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2007 |
|
RU2346376C1 |
| Блок управления для двигателя на внутренних постоянных магнитах и двигательная установка, содержащая такой блок управления | 2017 |
|
RU2733224C2 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к устройству и способу для управления гибридным двигателем, а более конкретно к устройству и способу для управления гибридным двигателем, в котором в роторе вместо катушки индуктивности используется постоянный магнит. Техническим результатом является упрощение конфигурации гибридного двигателя и снижение стоимости изготовления гибридного двигателя. В устройстве для управления гибридным двигателем обмотка наматывается вокруг статора и выполнена в виде многофазных независимых параллельных секций, на роторе установлен кодовый датчик положения выпрямительного типа, а сенсорный датчик соединен со схемой запуска для плавного старта и вращения гибридного двигателя. Кодовый датчик положения установлен на роторе гибридного двигателя и работает совместно с сенсорным датчиком для определения полюса ротора. Сенсорный датчик предназначен для вывода сенсорного сигнала, обозначающего полюс ротора и считываемого кодовым датчиком положения. Устройство содержит входной узел скорости для генерирования сигнала задания скорости для привода двигателя; цепь силовых переключений для генерирования сигналов для запуска двигателя; модуль привода для приема сигнала задания скорости и сенсорного сигнала и выдачи сигнала задания скорости, синхронизированного с сенсорным сигналом, в качестве сигнала для запуска двигателя; источник питания для подачи тока постоянного напряжения в цепь силовых переключений; и логический источник питания для преобразования постоянного напряжения, получаемого от источника питания, в логическое напряжение и для использования преобразованного логического напряжения в модуле привода. Если в двигателе n-е число фаз, то двигатель содержит n-е число цепей силовых переключений и n-е число модулей привода. 2 н. и 8 з.п. ф-лы, 6 ил.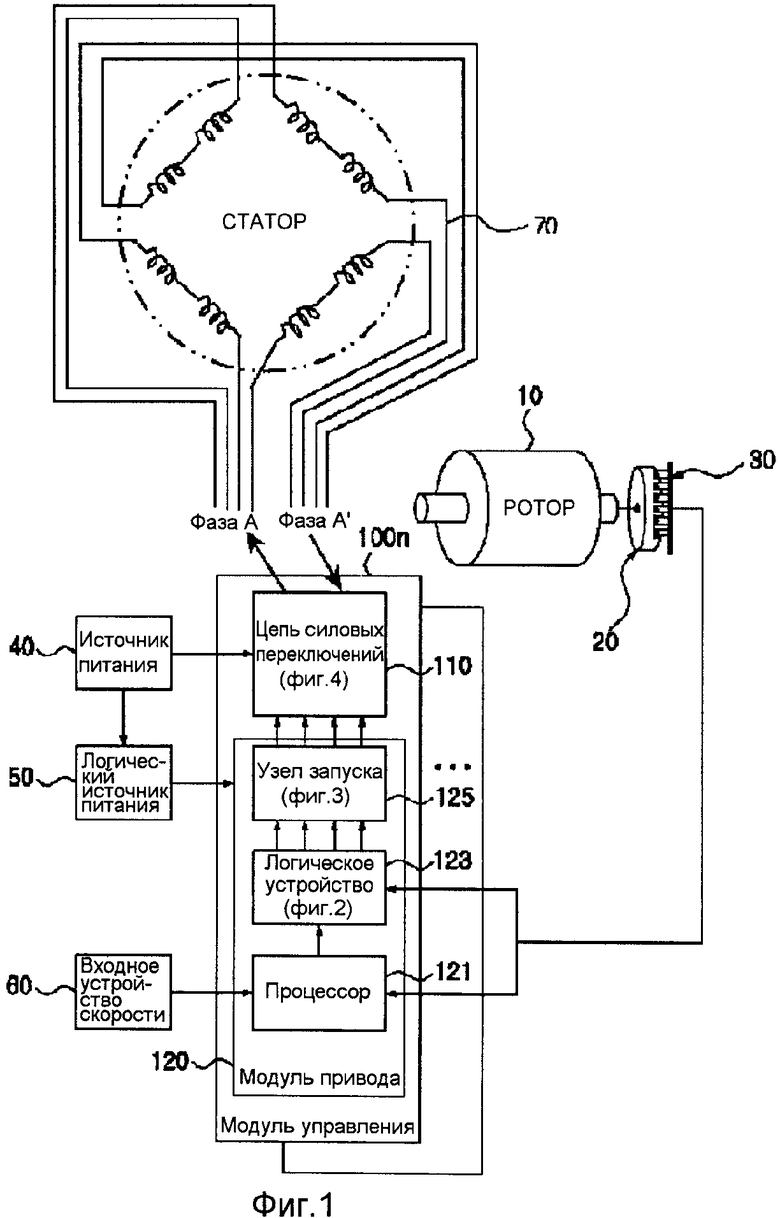
1. Устройство для управления гибридным двигателем, который имеет многофазную обмотку статора, выполненную в виде независимых параллельных секций, содержащее: кодовый датчик положений, установленный на роторе гибридного двигателя и работающий совместно с сенсорным датчиком для определения полюса ротора; сенсорный датчик для вывода сенсорного сигнала, обозначающего полюс ротора, считываемого кодовым датчиком положения; входной узел скорости для генерирования сигнала задания скорости для привода двигателя; цепь силовых переключений для генерирования сигналов для привода в действие двигателя; модуль привода для приема сигнала задания скорости и сенсорного сигнала и выдачи сигнала задания скорости, синхронизированного с сенсорным сигналом, в качестве сигнала для привода двигателя; источник питания для подачи тока постоянного напряжения в цепь силовых переключений; и логический источник питания для преобразования постоянного напряжения, получаемого от источника питания, в логическое напряжение и для использования преобразованного логического напряжения в модуле привода, при этом если в двигателе выполнено n число фаз, то двигатель включает n число цепей силовых переключений и n число модулей привода.
2. Устройство по п.1, отличающееся тем, что модуль привода включает в себя: процессор для приема сигнала задания скорости и сенсорного сигнала и выдачи сигнала задания скорости, синхронизированного с сенсорным сигналом; логическое устройство на интегральных схемах для объединения сигнала задания скорости и сенсорного сигнала и выдачи сигнала привода двигателя; и привод для приема сигнала привода двигателя от логического устройства и выдачи сигналов для запуска цепи силовых переключений.
3. Устройство по п.1 или 2, отличающееся тем, что двигатель включает многофазную обмотку статора, выполненную в виде независимых параллельных секций, а секции, соответствующие различным фазам, имеют одинаковое состояние возбуждения.
4. Устройство по п.1 или 2, отличающееся тем, что датчик положения имеет светоэкранирующую часть и световоспринимающую часть, сформированные на пластине кодового датчика положения.
5. Устройство по п.1 или 2, отличающееся тем, что процессор выполнен с возможностью преобразования сигнала задания скорости в форме аналогового сигнала в цифровой сигнал с помощью аналого-цифрового преобразователя и выдачи цифрового сигнала задания скорости каждый раз при входе сенсорного сигнала.
6. Устройство по п.1 или 2, отличающееся тем, что цепь силовых переключений имеет конфигурацию мостовой схемы Н, включающей первый, второй, третий и четвертый переключающие элементы.
7. Устройство по п.1 или 2, отличающееся тем, что обмотка статора гибридного двигателя представляет собой многофазную обмотку с независимыми параллельными секциями.
8. Устройство по п.7, отличающееся тем, что обмотка статора выполнена с возможностью формирования N-полюса и S-полюса в силу того, что ток на входе в паз обмотки отличается от тока на выходе из паза обмотки, и коррелирует с полюсом ротора для генерирования вращающего момента.
9. Способ управления гибридным двигателем, включающий: преобразование напряжения переменного тока в напряжение постоянного тока, использование постоянного тока в гибридном двигателе, преобразование напряжения постоянного тока в логическое напряжение и использование преобразованного логического напряжения в гибридном двигателе; ввод сигнала задания скорости двигателя; преобразование сигнала задания скорости двигателя в цифровой сигнал, объединение цифрового сигнала задания скорости с сенсорным сигналом, и вывод сигнала задания скорости, синхронизированного с сенсорным сигналом; объединение сигнала задания скорости с сенсорным сигналом и вывод сигналов для привода верхней и нижней ступеней двигателя; генерирование сигналов для привода двигателя, используя сигналы для привода верхней и нижней ступеней двигателя; вращение двигателя, используя сигналы привода; и генерирование сенсорного сигнала, обозначающего полюс ротора двигателя и позволяющего возвратиться на ступень преобразования сигнала задания скорости двигателя в цифровой сигнал, чтобы вновь произвести преобразование сигнала задания скорости в цифровой сигнал.
10. Способ по п.9, отличающийся тем, что в гибридном двигателе используют гибридный модуль управления, включающий процессор для приема сигнала задания скорости и сенсорного сигнала и выведения сигнала задания скорости, синхронизированного с сенсорным сигналом, логическое устройство на интегральных схемах для объединения сигнала задания скорости и сенсорного сигнала и выведения сигналов для привода двигателя; и запускающее устройство для приема сигналов привода двигателя от логического устройства и выведения сигналов для запуска цепи силовых переключений.
| СПОСОБ УПРАВЛЕНИЯ БЕСКОНТАКТНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2239937C2 |
| US 6710581 B1, 23.04.2004 | |||
| DE 102004030460 В3, 30.06.2005 | |||
| JP 2001251897 A, 14.09.2001 | |||
| Сигнатурный анализатор | 1985 |
|
SU1270760A1 |
| KR 100229963 B1, 15.11.1999 | |||
| Корректирующий задатчик скорости тормозимого колеса транспортного средства | 1977 |
|
SU631374A2 |
| WO 2006000192 A2, 05.01.2006. | |||

