Изобретение относится к электротехнике и может быть использовано для вращательного перемещения подвижного элемента, а также в позиционных устройствах, требующих совмещения перемещения поданного элемента в аксиальном направлении с его вращением вокруг продольной оси двигателя и осуществления точного останова рабочего органа.
Цель изобретения - расширение эксплуатационных возможностей путем реализации режима вращательного движения.
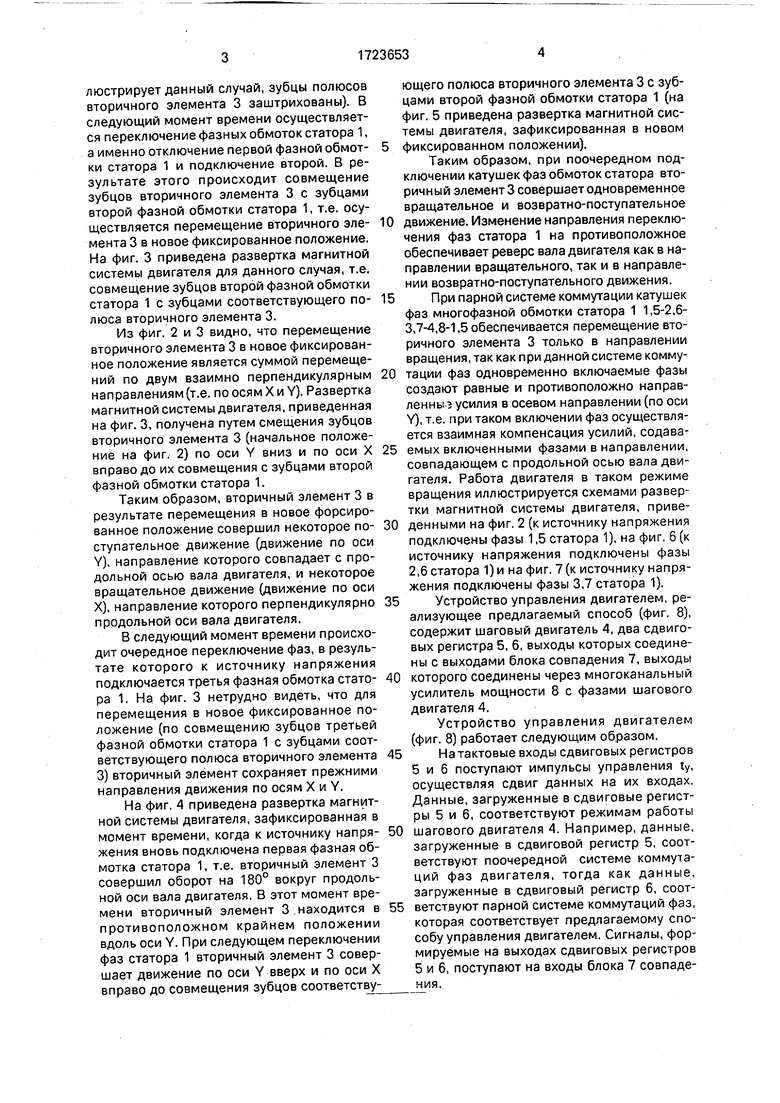
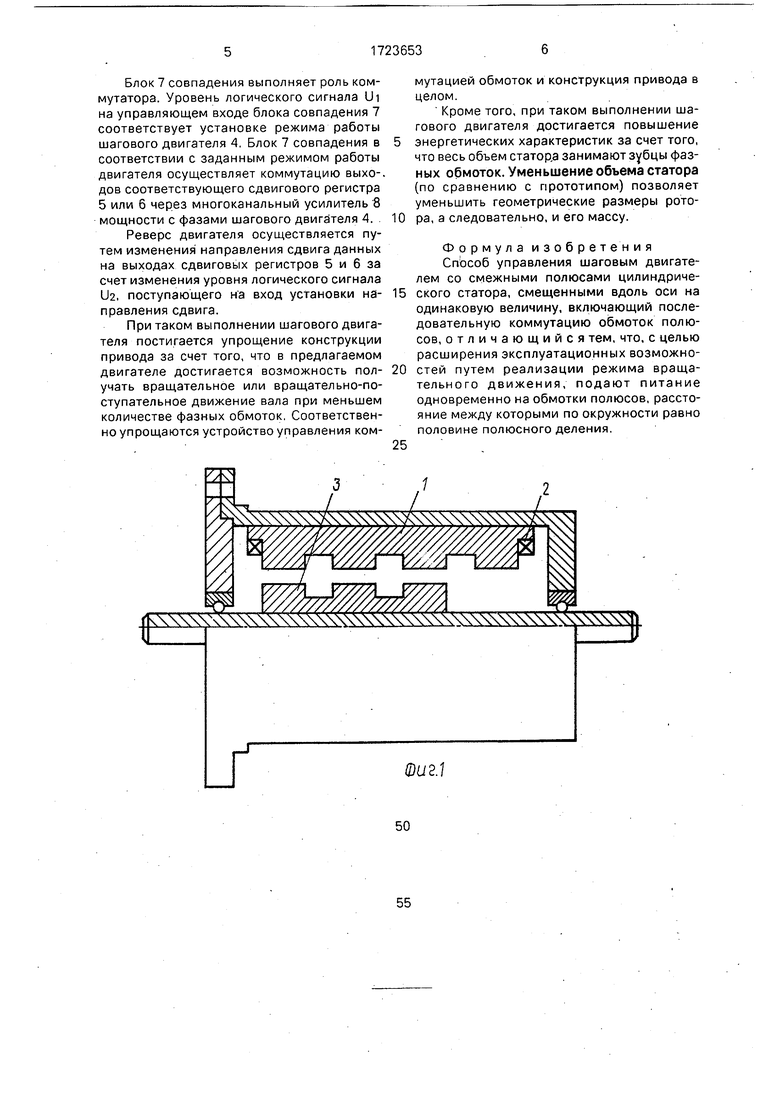
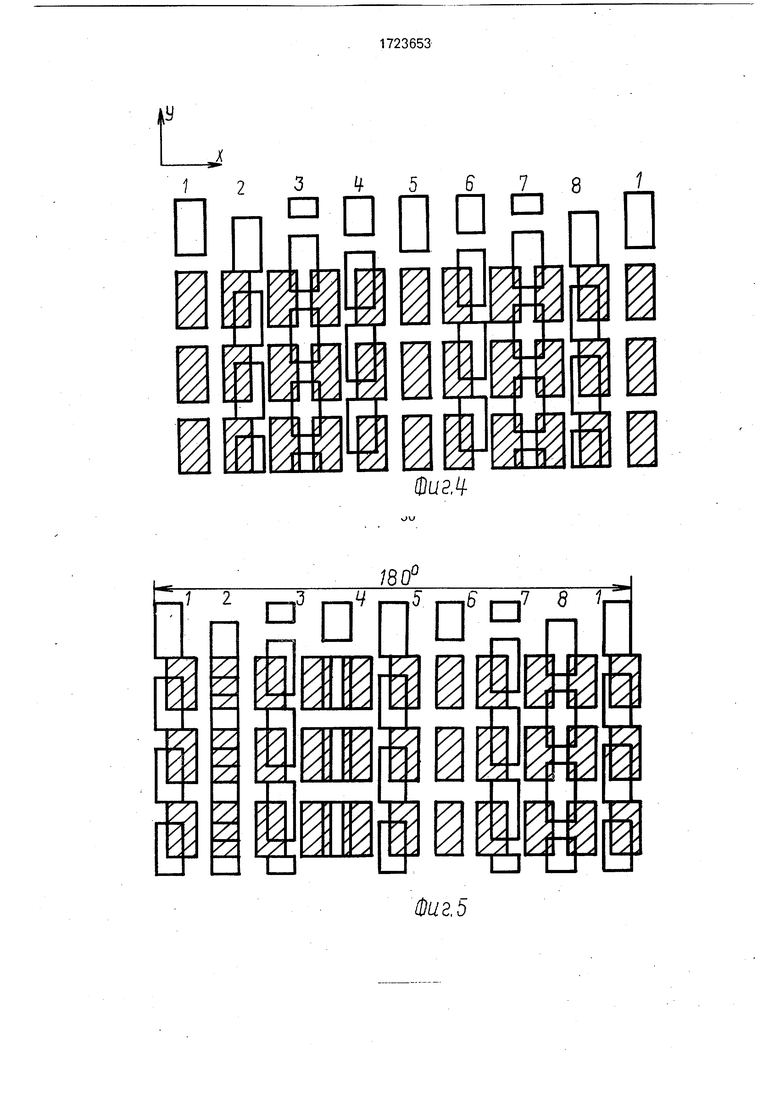
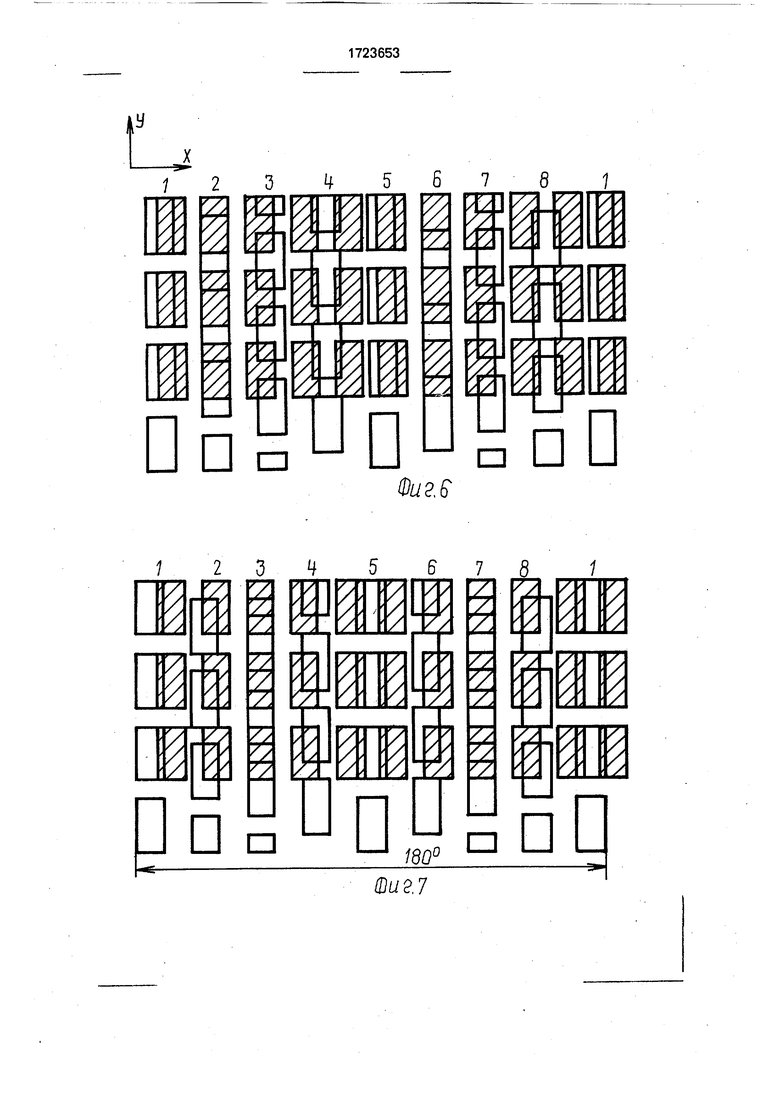
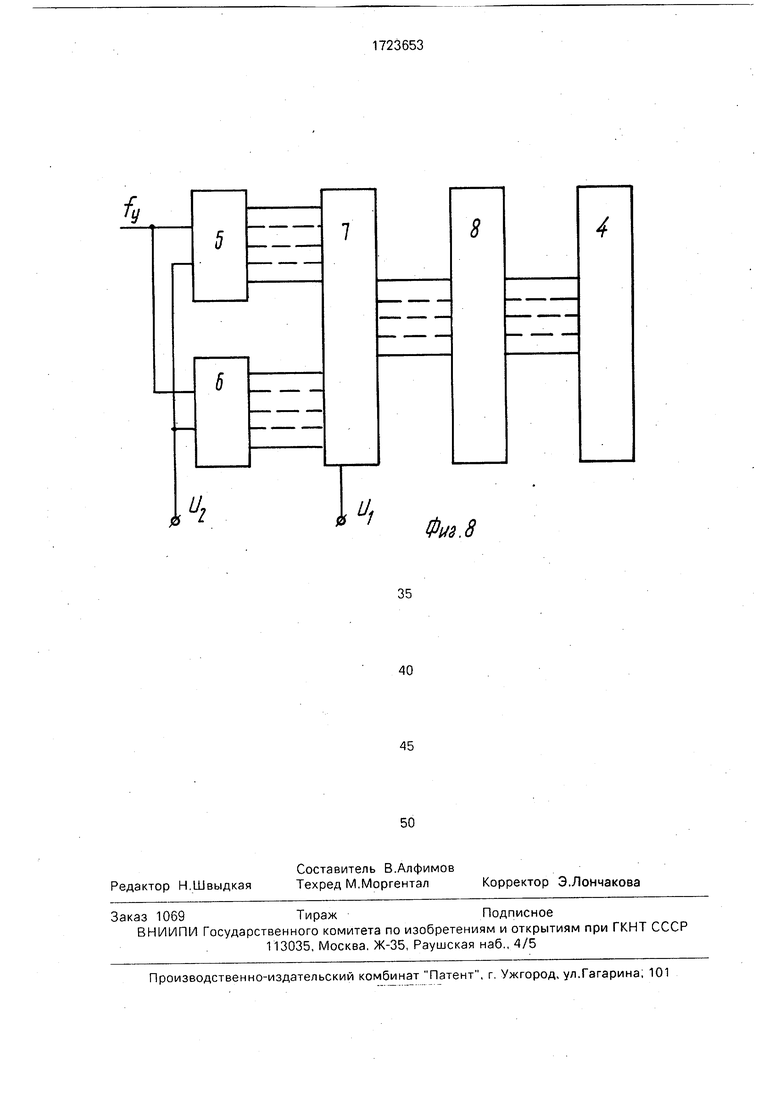
На фиг. 1 схематически показан электродвигатель, продольный разрез; на фиг. 2-7 - развертка магнитной системы двигателя, в различных положениях ротора (ось параллельна продольной оси двигателя); на фиг. 8 - функциональная схема устройства управления двигателем.
Шаговый двигатель (фиг. 1) содержит статор 1, состоящий из отдельных магнито- проводов, полюса которых охвачены катушками многофазной обмотки 2 с числом фаз,
кратным числу магнитопроводов статора 1, и вторичный элемент 3, состоящий из отдельных магнитопроводов. На полюсах вторичного элемента 3 и статора 1 выполнены зубцы, причем зубцы на полюсах статора 3 смещены по отношению к зубцам смежных полюсов на постоянную величину в осевом направлении.
Способ управления шаговым двигателем заключается в следующем.
Для реализации режима вращательного движения включают попарно обмотки полюсов, расстояние между которыми по окружности равно половине полюсного деления.
Допустим, что в некоторый момент времени к источнику напряжения подключены полюса первой фазной обмотки статора 1 шагового электродвигателя. Усилие взаим-. ного притяжения возбужденных полюсов первой фазной обмотки статора 1 и зубцов вторичного элемента 3 приводит к их совмещению (на фиг. 2 приведена развертка магнитной системы двигателя, которая илСО
С
4
hO СО
о ел со
люстрирует данный случай, зубцы полюсов вторичного элемента 3 заштрихованы). В следующий момент времени осуществляется переключение фазных обмоток статора 1, а именно отключение первой фазной обмот- ки статора 1 и подключение второй. В результате этого происходит совмещение зубцов вторичного элемента 3 с зубцами второй фазной обмотки статора 1, т.е. осуществляется перемещение вторичного эле- мента 3 в новое фиксированное положение. На фиг. 3 приведена развертка магнитной системы двигателя для данного случая, т.е. совмещение зубцов второй фазной обмотки статора 1 с зубцами соответствующего по- люса вторичного элемента 3.
Из фиг. 2 и 3 видно, что перемещение вторичного элемента 3 в новое фиксированное положение является суммой перемещений по двум взаимно перпендикулярным направлениям (т.е. по осям X и Y). Развертка магнитной системы двигателя, приведенная на фиг. 3, получена путем смещения зубцов вторичного элемента 3 (начальное положение на фиг. 2) по оси Y вниз и по оси X вправо до их совмещения с зубцами второй фазной обмотки статора 1.
Таким образом, вторичный элемент 3 в результате перемещения в новое форсированное положение совершил некоторое по- ступательное движение (движение по оси Y), направление которого совпадает с продольной осью вала двигателя, и некоторое вращательное движение (движение по оси X), направление которого перпендикулярно продольной оси вала двигателя.
В следующий момент времени происходит очередное переключение фаз, в результате которого к источнику напряжения подключается третья фазная обмотка стато- ра 1, На фиг. 3 нетрудно видеть, что для перемещения в новое фиксированное положение (по совмещению зубцов третьей фазной обмотки статора 1 с зубцами соответствующего полюса вторичного элемента 3) вторичный элемент сохраняет прежними направления движения по осям X и Y.
На фиг. 4 приведена развертка магнитной системы двигателя, зафиксированная в момент времени, когда к источнику напря- жения вновь подключена первая фазная обмотка статора 1, т.е. вторичный элемент 3 совершил оборот на 180° вокруг продольной оси вала двигателя. В этот момент времени вторичный элемент 3 .находится в противоположном крайнем положении вдоль оси Y. При следующем переключении фаз статора 1 вторичный элемент 3 совершает движение по оси Y вверх и по оси X вправо до совмещения зубцов соответствующего полюса вторичного элемента 3 с зубцами второй фазной обмотки статора 1 (на фиг. 5 приведена развертка магнитной системы двигателя, зафиксированная в новом фиксированном положении).
Таким образом, при поочередном подключении катушек фаз обмоток статора вторичный элемент 3 совершает одновременное вращательное и возвратно-поступательное движение. Изменение направления переключения фаз статора 1 на противоположное обеспечивает реверс вала двигателя как в направлении вращательного, так и в направлении возвратно-поступательного движения.
При парной системе коммутации катушек фаз многофазной обмотки статора 1 1,5-2,6- 3,7-4,8-1,5 обеспечивается перемещение вторичного элемента 3 только в направлении вращения, так как при данной системе коммутации фаз одновременно включаемые фазы создают равные и противоположно направленны з усилия в осевом направлении (по оси Y), т.е. при таком включении фаз осуществляется взаимная компенсация усилий, содава- емых включенными фазами в направлении, совпадающем с продольной осью вала двигателя. Работа двигателя в таком режиме вращения иллюстрируется схемами развертки магнитной системы двигателя, приведенными на фиг, 2 (к источнику напряжения подключены фазы 1,5 статора 1), на фиг. 6 (к источнику напряжения подключены фазы 2,6 статора 1) и на фиг. 7 (к источнику напряжения подключены фазы 3,7 статора 1).
Устройство управления двигателем, реализующее предлагаемый способ (фиг. 8), содержит шаговый двигатель 4, два сдвиговых регистра 5, 6, выходы которых соединены с выходами блока совпадения 7, выходы которого соединены через многоканальный усилитель мощности 8 с фазами шагового двигателя 4.
Устройство управления двигателем (фиг. 8) работает следующим образом.
На тактовые входы сдвиговых регистров 5 и 6 поступают импульсы управления ty, осуществляя сдвиг данных на их входах. Данные, загруженные в сдвиговые регистры 5 и 6, соответствуют режимам работы шагового двигателя 4. Например, данные, загруженные в сдвиговой регистр 5, соответствуют поочередной системе коммутаций фаз двигателя, тогда как данные, загруженные в сдвиговый регистр 6, соответствуют парной системе коммутаций фаз, которая соответствует предлагаемому способу управления двигателем, Сигналы, формируемые на выходах сдвиговых регистров 5 и 6, поступают на входы блока 7 совпадения.
Блок 7 совпадения выполняет роль коммутатора. Уровень логического сигнала Ui на управляющем входе блока совпадения 7 соответствует установке режима работы шагового двигателя 4. Блок 7 совпадения в соответствии с заданным режимом работы двигателя осуществляет коммутацию выхо-. дов соответствующего сдвигового регистра 5 или 6 через многоканальный усилитель 8 мощности с фазами шагового двигателя 4.
Реверс двигателя осуществляется путем изменения направления сдвига данных на выходах сдвиговых регистров 5 и 6 за счет изменения уровня логического сигнала Ua, поступающего н а вход установки направления сдвига.
При таком выполнении шагового двигателя постигается упрощение конструкции привода за счет того, что в предлагаемом двигателе достигается возможность получать вращательное или вращательно-по- ступательное движение вала при меньшем количестве фазных обмоток. Соответственно упрощаются устройство управления коммутацией обмоток и конструкция привода в целом.
Кроме того, при таком выполнении шагового двигателя достигается повышение
энергетических характеристик за счет того, что весь объем статор.а занимают зубцы фазных обмоток. Уменьшение объема статора (по сравнению с прототипом) позволяет уменьшить геометрические размеры ротора, а следовательно, и его массу.
Формула изобретения Способ управления шаговым двигателем со смежными полюсами цилиндрического статора, смещенными вдоль оси на одинаковую величину, включающий последовательную коммутацию обмоток полюсов, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем реализации режима вращательного движения, подают питание одновременно на обмотки полюсов, расстояние между которыми по окружности равно половине полюсного деления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2071628C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476640A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| Шаговый электродвигатель | 1988 |
|
SU1728943A1 |
| Шаговый двигатель и способ управления шаговым двигателем | 1984 |
|
SU1288835A1 |
| Бесконтактный многофазный синхронный коммутаторный генератор | 1977 |
|
SU752645A1 |
| Пьезоэлектромагнитный шаговый двигатель для перемещения носителя информации | 1988 |
|
SU1583996A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416859C1 |
Использование: совмещенное перемещение подвижного элемента в аксиальном направлении с его вращением вокруг продольной оси и осуществление точного останова рабочего органа. Сущность изобретения: в шаговом двигателе со смежными полюсами цилиндрического статора, смещенными вдоль оси на одинаковую величину, питание подают одновременно на обмотки полюсов, расстояние между которыми по окружности равно половине полюсного деления. 8 ил.
У УС У Х УЛХ Уч УчЧУчХ
Шг,2
| Шаговый двигатель и способ управления шаговым двигателем | 1984 |
|
SU1288835A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США №4607187, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
