ИзобреЧгение относится к вычисли- . тельной технике и может быть использовано для научения взаимодействия нейронных -структур путем моделировам
НИН.
Цель изобретения повышение точности моделирования взаимодействия нейронных структур двигательного аппарата, I
На фиг.1 приведена структурная схема предлагаемого устройства; на фит.2 - функциональная схема блока моделирования свойств мышц; на фиг,3 функциональная схема блока моделирования механической нагрузки.
Устройство для моделирования нейронных структур (фиг,1) содержит блок 1 моделирования нейронов, в котором каждьш аналог нервной клетки состоит из преобразователя 2 аналогового напряжения в импульсньй поток, к входам которого подклзочены сумматоры 3 один непосредственно, а другой - через инвертор 4. Выходы преоб- разователей 2 являются выходами блока 1 моделирования нейронов, и подключены к выходам первого наборного поля 5, |первые и вторые входы которого подклю- чены к входам соответствующих сум- маторов 3 аналогов нейронов, являющихся входами блока 1 моделирования нейронов . Блок 6 моделирования синапсов Состоит из цепочек последовательно соединенных схег-ш 7 временного сум;- мирования и электронного клзоча 8, а входы и выходы цепочек соединены с входами и выходами второго наборного поля 9, Выходы блока 10 моделировани мембран соединены с выходами третье- го наборного поля 11, которые подключены к входам первого наборного поля 5,, к которым подключены также выходы второго наборного поля 9, часть которых соединена с входами собственного наборного поля §, к другим входам которого подключены выходы первого наборного поля 5. Блок 12 переключателей через свои первые входы и выходы- и первые входы и выходы блока 13 моделирования аксонов связывает выходы первого наборного поля 5 с первы- ми входами блока 14 моделирования свойства мьппц и их рецепторных образований, первые выходы которого чере
вторые входы и выходы блока 13 моде- лирования аксонов и вторые входы и выходы блока 12 переключателей соединены с входами второго наборного по-
10
15
20
25. 30 5 40 45jg. з.,
858094
ля 9, а вторые входы и выходы блока 4 моделирования свойств мышц соединены через выходы и первые входы блока 15 моделирования механической нагрузки. Все ВХОД1.1 и выходы блока 14 моделирования свойств мьшц соединены с входами блока 16 регистрации и с входами блока 17 индикации, к которым подключены третьи выходы блока 12 переключателей, к третьим входам которого подключены первые выходы блока 18 задающих генераторов, вторые выходы которого подключены к вторым входам блока 15 моделирования механической нагрузки, а выходы преобразователей - также подк.чючены к входам блока 17 индикации. Наборные поля 5,9,11 и блок 12 переключателей образуют блок 19 коммутации.
Блоки 1,6 и 10 моделирования нейронов , моделирования синапсов и моделирования мембран нервных клеток соответственно содержат отдельные структурно-функциональные элементы модели нейрона, которые конструктивно и пространственно разделены в предлагаемом устройстве для моделирования нейронных структур системы управления движением, а их входы и выходы вьгее- дены на соответствующие Наборные поля.
Блок 12 переключателей выполнен как набор т жблеров и переключателей, с помощью которых осуществляется от-, ключение или подключение отдельных элементов структуры в процессе ис - следования или замыкание и размыкание каких-либо связей структуры.
Блок 13 моделирования аксонов выполнен из отдельных цепочек последовательно соединенных формирователей импульсов, в каждой из которых осуществляется задержка генерации импульса на выходе по отношению к моменту активации входа.
Блок 14 моделирования свойств мышц и их рецепторных образований содержит аналоги , например модели мышцы, первые входы и выходы которых представляют собой импульс- ные входы и выходы, а вторые входы и вьгхоДы являются аналоговыми, напряжения на которых интерпретируются соответственно в терминах длины и силы мышцы.
Блок 15 моделирования механической нагрузки моделирует свойства внешней среды и воспроизводит
метры подвижных звеньев конечности, положением которых управляют сокращающиеся и развивающие силу под действием импульсапии на первых входах блока 14 различные fышeчныe группы.
Блок 16 регистрации включает осциллографы для наблюдения и регистрации на кино- или фотопленку импульсных потоков и аналоговых сигналов, устройства преобраз.ования и кодирования межимпульсных интервалов и аналоговых напряжений для последующей обработки на ЭВМ с возможным выводом информации о результатах экспериментов на цифропечать и графопостроители.
Блок 17 индикации включает информационное табло с расположеиньпуги на нем в определенном порядке светодио- дами,включение которых осуществляется через согласующие схемы самими сигналами, которые поступают в виде
15858D9
10
15
20
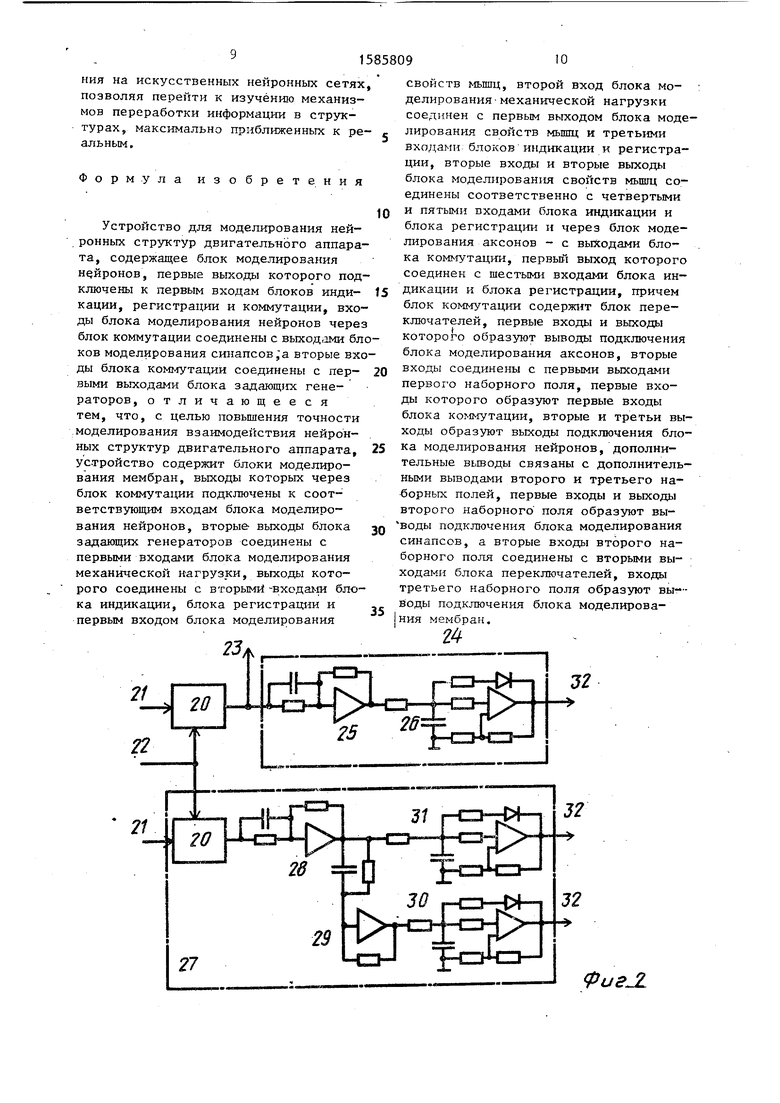
имеющие в своем составе сократимые структуры - интрафузальные мышечные волокна. Свойства сухожильного органа Гольджи моделируются блоком 24, в котором передаточными характеристиками пропорционально-дифференцирующего звена 25 моделируются упруго- вязкие свойства капсулы сухожильного органа, а на преобразователе 26 аналогового напряжения в импульсньА поток воспроизводятся характеристики преобразования рецепторного потенциала в распространяющиеся по аксонам афферентного нейрона импульсы, несущие в нервную систему информацию о напряжениях, возникающих в мыш цах. Свойства мышечного веретена моделируются блоком 27, в состав которого входят модель мьшгцы 20,а свой- ства рецепторньпс образований вере- . тена моделируются пропорционально- дифференцирующими звеньями 2.8 и 29 и подк люченными к ним преобразовате7 - jr А fj ,c )IInи 14 МИМ i 1ре О ор а 3 О В а Т е™
импульсных потоков от нейронной струк-25 лями 30 и 31, являющимися соответсттуры и в виде аналоговых напряжений, соответствующих изменению состояний объекта.,управления и аналогов мьппц., Блок 18 задающих генераторов содержит генераторы импульсов и гене- 30 раторы аналоговых сигналов различной .формы, например линейно-изменяющегося напряжения или напряжения прямоугольной формы, а также сигналов трапецеидальной формы.
Кроме указанных связей устройства к регистрирующей аппаратуре для наблюдения и анализа сигналов могут быть подключены любые другие точки нейронной структуры и моделей мьшцы, изменение напряжений в которых необходимо исследовать для изучения закономерностей передачи информации и характера ее преобразования, опреде- ляемых функционированием целостной дс структуры исследуемой системы, а именно ее модели.
На фиг.2 представлена схема блока 14 моделирования свойств мьшщ и их рецепторных образований. Собственно 50 модель мышцы представлена на чертеже отдельным функциональным блоком 20, имеющим вход 21 импульсных сигналов, вход 22 аналогового сигнала
35
40
веино аналогами преобразования рецепторных потенциалов первичных и вторичных окончаний в импульсные потоки в афферентных волокнах Та и II групп. Выходы 32 всех рецепторных образований являются первыми выходами блока 14 моделирования свойств мыатц и их рецепторных образований, В блоке 14 содержится несколько анало t OB мьшщ и их рецепторных образований, которые через входы и выходы бока 15 моделирования, механической нагрузки соединяются в группы, имитирующие работу мышц синергистов и антагонистов подвижных звеньев конечностей, В этом случае входы 22 и выходы 23 являются вторыми входами и выходами блока 14,
На фиг.З представлена схема блока 15 моделирования механической нагрузки, в основе которого лежит схема блока моделирования механических свойств внешней среды. Объект управления ос- тцествляет преобразование сил, разв1 ваемьгх мьппцами, в ускоре- ние, сообщаемое подвижному звену, которое сравнивается с заданным ускорением силы тяжести. Разность ускорений в результате двойного интегt, „ ..run j3 сзулътате двойного инте
Длина мышцы и выход 23 Сила, раз- 55 Рирования преобразуется последовав
13 тдт} еая,г о и -п. г -г...... тг .. ffвиваемая мьш1ечным волокном, К мьшхеч- ным рецепторам растяжения относятся сухожильные органы Гольджи и веретена - сложные структурные образования.
тельно в скорость и изменение длины мышцы, которое определяет положение подвижных зеньев, к которым прикреплены эти мьшщы. В отличие от указан15858D9
0
5
0
имеющие в своем составе сократимые структуры - интрафузальные мышечные волокна. Свойства сухожильного органа Гольджи моделируются блоком 24, в котором передаточными характеристиками пропорционально-дифференцирующего звена 25 моделируются упруго- вязкие свойства капсулы сухожильного органа, а на преобразователе 26 аналогового напряжения в импульсньА поток воспроизводятся характеристики , преобразования рецепторного потенциала в распространяющиеся по аксонам афферентного нейрона импульсы, несущие в нервную систему информацию о напряжениях, возникающих в мышцах. Свойства мышечного веретена мо делируются блоком 27, в состав которого входят модель мьшгцы 20,а свой- ства рецепторньпс образований вере- . тена моделируются пропорционально- дифференцирующими звеньями 2.8 и 29 и подк люченными к ним преобразовате )IInи 14 МИМ i 1ре О ор а 3 О В а Т е™
5 лями 30 и 31, являющимися соответст0
с
5
0
веино аналогами преобразования рецепторных потенциалов первичных и вторичных окончаний в импульсные потоки в афферентных волокнах Та и II групп. Выходы 32 всех рецепторных образований являются первыми выходами блока 14 моделирования свойств мыатц и их рецепторных образований, В блоке 14 содержится несколько анало- t OB мьшщ и их рецепторных образований, которые через входы и выходы бока 15 моделирования, механической нагрузки соединяются в группы, имитирующие работу мышц синергистов и антагонистов подвижных звеньев конечностей, В этом случае входы 22 и выходы 23 являются вторыми входами и выходами блока 14,
На фиг.З представлена схема блока 15 моделирования механической нагрузки, в основе которого лежит схема блока моделирования механических свойств внешней среды. Объект управления ос- тцествляет преобразование сил, разв1 ваемьгх мьппцами, в ускоре- ние, сообщаемое подвижному звену, которое сравнивается с заданным ускорением силы тяжести. Разность ускорений в результате двойного интег v i v-..run j3 сзулътате двойного инте
Рирования преобразуется последовав
Рирования преобразуется последовав
fтельно в скорость и изменение длины мышцы, которое определяет положение подвижных зеньев, к которым прикреплены эти мьшщы. В отличие от указаннего в модели ышцы блок 15 моделирования механической нагрузки содер- ясит сумматор 33, к входам которого подключеньГ выходы 23 аналогов мышц- антагонистов, которые осуществляют сгибание конечностей в суставах. Выход этого сумматора подключен к вхо- ;ду сумматора 34, к другим входам которого подключены выходы 23 аналогов мышц-антагонистов, осуществляющих разгибание, подвижных звеньев конечностей в суставах. Далее вьгеод сумматора 34 подключен к усилителю 35, значение сопротивления переменного резис тора 36 на входе которого соответстпу вует массе грузов, которые могут Поднимать мьшщы. Выход усилителя 35 подключен к первому входу интегратора 37, к второму входу которого че- рез резистор подключен выход делителя 38, напряжение на котором соответствует значению выбираемой силы тяжести. Выход интегратора 37 подключен к входу, второго интегратора 39, выход которого через переключатель 40 соединен с входом инвертора 41. Вход 42 соединен с вторым выходом блока.18 задающих генераторов, а выходы 43 и 44 являются выходами Яблока 15 моделироваёия механической нагрузки, которые соединены с вторыми входами 22 блока 14 моделирования свойств мьшц и их рецепторных образований. Кроме того, выход интегра- тора 39 соединен с входом нуль-органа 45, к второму входу которого подключен делитель 46, напряжение на выходе которого соответствует устанавливаемой длине ограничения растя- жения мьтц (ограничение в суставе), а выход нуль-органа 45 через диод соединен с обмоткой реле 47, контакты 48 которого через второй диод включены в цепь обратной связи иг.теграто- ра 37 параллельно конденсатору.
Устройство для моделирования нейронных структур системы управления движением работает следующим образом
После включения питания отдельных блоков на блоке 17 индикации свето- диодами отражается состояние отдельных элементов блоков 1 и 14: свето- диоды отражают характер импульсной активности нейронов, светящиеся столбики и площадки характеризуют длину отдельных мьшщ, развиваемое ими на- пряжение, величину воздействующих на подвижные звенья конечности грузов;.
Включается необходимая для исследования регистрирующая и .обрабатывающая аппаратура. Коммутационными шнурами на наборных полях 5,9 и 11 осуществляется набор необходимой организации, входов нейронов, свойств мембран, определяющих размер моделируемой клетки, и связи между нейронами, соответствующие исследуемой нейронной структуре. Структура набираемых связей отражается в блоке 17 индикации, котог рый помогает визуально контролировать и оценивать в целом работу многопараметрической системы.Отдельные группы нейронов через блок 12 переключателей и блок 13 моделирования аксонов подключаются к входам 21 блока 14 моделирования свойств мьппц, выходы 32 которого подключаются через блок 13 моделирования аксонов и блок 12 переключателей к входам нейронов, неся информацию в виде импульсных потоков о состоянии периферического звена (напряжениях и длинах мышц и скоростях их изменения) - объектна управления для нервной системы. С помо- шью блока 18 задающих генераторов на отдельные элементы нейронной структуры или на импульсные.входы аналогов мышц от генераторов импульсов через блок 12 переключателей могут подаваться тестирующие посылки для исследования реакции отдельных элементов структуры. Моделям мышц, кроме воспроизведения различных режимов их работы изменением массы грузов (пё ремен- ный резистор 36) или изменением уског рения силы тяжести (делитель 38 напряжения) , можно задавать изменение их длины программно от генератора аналоговых напряжений при установке переключателя 40 в соответствующее положение, когда подключается второй вход в блоке 15 моделирования механической нагрузки. Такой режим необходим, например, для воспроизведения на устройстве условий нейрофизи- ологш1еских экспериментов по исследованию активности мьшечных рецепторов растяжения, чтобы показать адекватность поведения отдельных элементов или звеньев структуры и затем перейти к изучению из взаимодействия в целостной сети.
Выделение отдельных узлов аналогов нейронов в самостоятельные функциональные блоки коренным образом изменяет возможности экспериментирования на искусственных нейронных сетях, позволяя перейти к изучение механизмов переработки информации в структурах, максимально приближенных к реальным.
Формула изобретения
Устройство для моделирования ней- . ронных стрзгктур двигательного аппарата, содержащее блок моделирования нейронов, первые выходы которого подключены к первым входам блоков инди- кации, регистрации и коммутации, входы блока моделирования нейронов через блок коммутации соединены с выход.ами блков моделирования синапсов, а вторые входы блока коммутации соединены с пер- выми выходами блока задающ1гх гене- раторов, отличающееся тем, что, с целью повышения точности моделирования взаимодействия нейронных структур двигательного аппарата, устройство содержит блоки моделирования мембран, выходы которых через блок коммутации подключены к соот- ветствзтощим входам блока моделирования нейронов, вторые выходы блока задающих генераторов соединены с первыми входами блока моделирования механической нагрузки, выходы которого соединены с вторыми -входа 1И блока индикации, блока peгиcтpaцliи и первым входом блока моделирования
2i
2В
30 32 .{ iHZlJ
10
5
5 0
0
5
свойств мьшц, второй вход блока моделирования- механической нагрузки соединен с первым выходом блока моделирования свойств мьшщ и третьими входами блоков индикации и регистрации, вторые входы и вторые выходы блока моделирования свойств мьшщ соединены соответственно с четвертыми и пятыми входами блока индикации и блока регистрации и через блок моделирования аксонов - с выходами блока коммутации, первый выход которого соединен с шестыми входами блока индикации и блока регистрации, причем блок коммутации содержит блок переключателей, первые входы и выходы которого образуют выводы подключения блока моделирования аксонов, вторые входы соединены с первыми выходами первого наборного поля, первые входы которого образуют первые входы блока ком гутации, вторые и третьи выходы образуют выходы подключения блока моделирования нейронов, дополнительные вьшоды связаны с дополнительными выводами второго и третьего наборных полей, первые входы и выходы второго наборного поля образуют вы- воды подключения блока моделирования синапсов, а вторые входы второго наборного поля соединены с вторыми выходами блока переключателей, входы третьего наборного поля образуют вы-воды подключения блока моделирования мембран.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования нейронных структур | 1973 |
|
SU478329A1 |
| ОПТОЭЛЕКТРОННАЯ МОДЕЛЬ НЕЙРОННОЙ СЕТИ | 1992 |
|
RU2070334C1 |
| Модель рецептора-мышечного веретена | 1987 |
|
SU1511752A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СИСТЕМ | 1990 |
|
RU2050019C1 |
| Модель мышцы | 1983 |
|
SU1164746A1 |
| Модель мышцы | 1978 |
|
SU765825A1 |
| Устройство для моделирования нейронных ансамблей | 1980 |
|
SU903910A1 |
| Устройство для моделирования афферентного нейрона | 1986 |
|
SU1401490A1 |
| Модель многонейронной рефлекторной дуги | 1987 |
|
SU1474683A1 |
| Управляемая модель нейрона | 1980 |
|
SU943765A1 |

Изобретение относится к вычислительной технике и позволяет повысить точность моделирования взаимодействия нейронных структур двигательного аппарата. Устройство содержит блок 1 моделирования нейронов, соединенный с блоком 17 индикации, блоком 16 регистрации и блоком 19 коммутации. К блоку 19 подключены блок 6 моделирования синапсов, блок 10 моделирования мембран и блок 13 моделирования аксонов, а также выходы блока 18 задающих генераторов, другие выходы которого соединены с входами блока 15 моделирования механической нагрузки. К вторым входам блока 15 подсоединены выходы блока 14 моделирования свойств мышц, другие входы и выходы которого соединены с соответствующими выходами и входами блока 13. Выходы блоков 14 и 15 подключены к соответствующим входам блока 16 регистрации и блока 17 индикации. Блок 19 коммутации содержит блок 12 переключателей, связанный с блоком 13. Входы блока 12 соединены с выходами первого наборного поля 5, соединенного с блоком 1. Выходы блока 12 соединены с входами второго наборного поля 9, соединенного с блоком 6. Третье наборное поле 11, входящее в состав блока 19, соединено с блоком 10 моделирования мембран, напорные поля 11, 9 соединены с первым наборным полем 5. Выбор модели нейронной структуры осуществляется коммутационными шнурами наборных полей 5, 9, 11 и отображается в блоке 17. Отдельные группы моделей нейронов подключаются через блоки 12 и 13 к входам блока 14, на выходах которого формируются сигналы о состояниях мышц и скоростях изменения. С выходов блока 18 задающих генераторов подаются тестирующие сигналы для исследования реакции отдельных элементов структуры. Характер импульсной активности моделей нейронов и состояние моделей мышц также отображаются в блоках 17 и 16. 3 ил.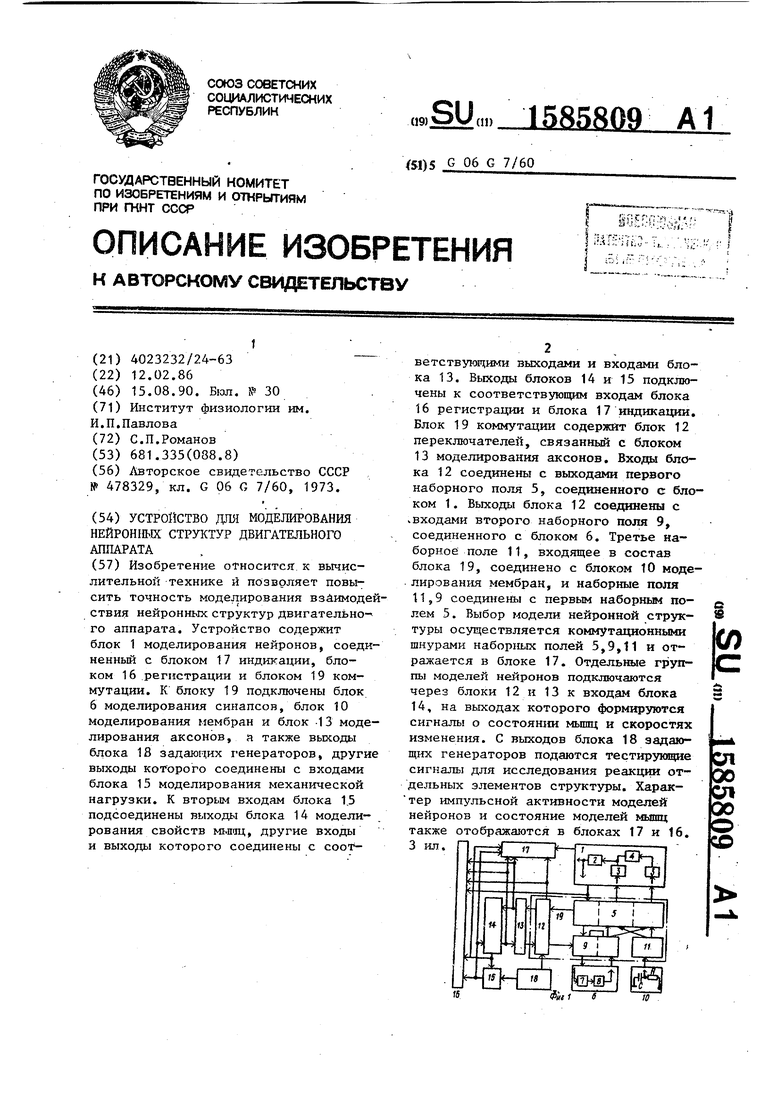
27
ueJL
47
л
Фиг.З
| Устройство для моделирования нейронных структур | 1973 |
|
SU478329A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
