1
Изобретение относится к моделированию биологических систем управления и может использоваться как объект при исследованиях нейрональных механизмов управления мьошечным сокращением. 5
Известна модель мышцы, содержащая последовательно соединенные блоки, моделирующие сократительные и упруговязкие свойства интрафузальных мышечных волокон, свойства рецепторных об- Ю разований веретена, и последовательно соединенные блоки, моделирующие сократительные и упруго-вязкие свойства экстрафузальных мышечных волокон и свойства рецепторного образования су- 15 хожильного органа Гольджи Л .
Недостатком известной модели является то, что на ней не воспроизводится присущая реальной мышце нелинейная 20 зависимость преобразования длины и напряжения, не учитываются свойства внешней среды, такие как ускорение силы тяжестки и масса воздействующих грузов, противодействие которых прео- 25 долевается сокращающейся мышцей. Все это сужает область применимости модели при сопоставлении результатов модельных экспериментов и экспериментов на реальной мышце.30
цель изобретения - расширение функциональных свойств модели.
Поставленная цель достигается тем, что в модель дополнительно введены преобразователи длины мышцы в активное и пассивное напряжение, блок преобразования сокращения мышцы в активное напряжение, блок моделирующий механические свойства внешней среды, состоящий из последовательно соединенных блоков преобразования усилия, развиваемого мышцей, в ускорение, ускоренияв скорость, скорость в длину мышцы, причем один из входов блока преобразования сокращения мышцы в активное напряжение соединен с выходом блока, моделирующего сократительные свойства экстрафузальных мышечных волокон, а выход блока преобразования сокращения мышцы в активное напряжение соединен с одним из входов блока, моделирующего упруго-вязкие свойства экстрафузальных мышечных волокон, при этом входы блоков преобразования длины мышцы в активное и пассивное напряжение соединены с выходом блока преобразования скорости в длину мышиы, а выходы этих блоков соответственно соединены со вторыми входами блока преобразования сокращения мышцы в активное напряжение и блока, 4oдeлиpyющего упруго-вязкие свойства экстрафузальных мышечных волокон, выход которого соединен с одним из входов блок преобразования усилия, развиваемого мышцей, в ускорение, один из входов которого соединен с источником сигнала, соответствующего массе воздействующих на мышцу грузов, второй блока преобразования ускорения в скорость соединен с источником сигнала, соответствующего ускорения силы тяжести.
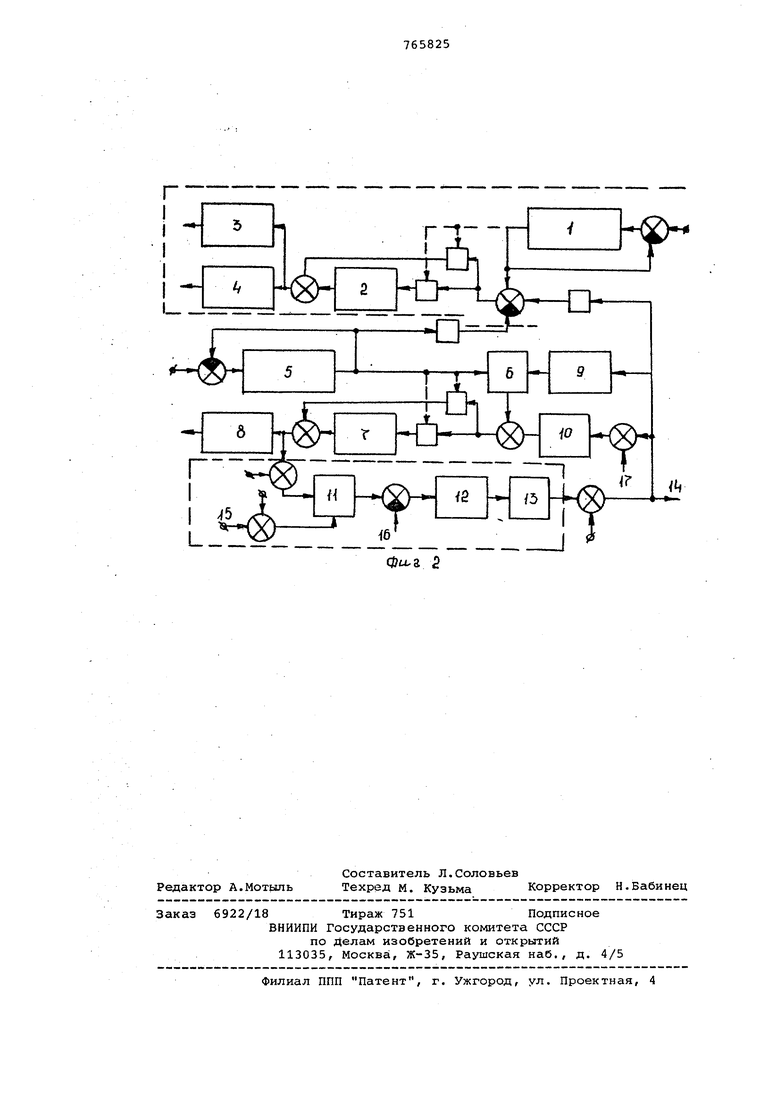
На фиг, 1 изображена структурная схема модели мышцы; на фиг. 2 - струтурно-функциональная схема модели мышцы с передаточными харатеристиками отдельных звеньев.
Модель мьЕццы функционально разделена на три группы блоков, моделирующих соответственно свойства мышечного веретена, свойства экстрафузальных мышечных волокон и механические свойства внешней среды. В первую группу входят последовательно соединенные блок 1, моделирующий сократительную функцию нитрофузальных мышечных волокон, блок 2, моделирующий .упруго-вязкие свойства этих волокон, и присоединенные к выходу блока 2 блоки 3 и 4, моделирующие .свойства рецепторных образований веретена. Во вторую группу блоков входят последовательно соединенные блок 5, моделирующий сократительные свойства экстрафузальных мышечных волокон, блок 6 преобразования сокращения мышцы в активное напряжение в виде блока умножения, блок 7, моделируквдий упруго-вязкие свойства экстрафузальных мышечных волокон, и блок 8, моделирующий свойства сухожильного органа Гольджи. Преобразователь 9 длины мышцы в активное напряжение со вторым входом блока б, а преобразователь 10 длины мьшщы в пассивное напряжение соединен со вторым входом блока 7.
Блок, моделирующий механические свойства внешней среды, состоит из последовательно соединеннных блока 11 преобразования усилия, развиваемого мышцей, в ускорение, блока 12 преобразования ускорения в скорость и блока 13 преобразования скорости в.длину мышцы. Причем блок 11 выполнен 3 виде блока деления, а блоки 12 и 13 - в виде интеграторов.
Связи между группами блоков образуют структурное единство модели мышды подключением выхода 14 модели, характеризующего изменение длины Фвицы, к блоку 2, преобразователям ) и 10, а выхода блока 5 - к одгому из входов блока 2. Выход блока 7 :оединен с одним из входов делимое лока 11, на вход 15 делитель котоюго подается напряжение, соответ;т.вующее массе воздействующих на мышцы грузов. Вход 16 блока 12 характеризует параметр ускорения внешней среды, а вход 17 преобразователя 10 характеризует параметр нулевой длины мышцы и позволяет смещать друг относительно друга характеристики активного и пассивного напряжений мышцы моделируемыми преобразователями 9 и 10. На входы блоков 1 и 5 подаются последовательности импульсов, соответствующие потокам от гаммаи альфа-мононейронов. На выходе блоков 3,4 и 8 формируются потенциалы мышечных рецепторов растяжения.
Модель работает следующим образом. В исходном состоянии на входы 15
5 и 16 подаются напряжения, соответствующие определенным массам грузов и ускорению силы тяжести. Напряжение на входе 17 соответствует величине, необходимой для задания расположения
0 характеристик нелинейных блоков преобразователей 9 и 10 друг относительно друга. Величина ускорения g поступает на вход 16 интегратора блока 12, на выходе которого сигнал пропорционален скорости, так как
(t)r(gw-«())dt
Интегрирование параметра скорость дает на выходе 14 блока 13 изменение длины мышцы в соответствии с формулой
Д1(г)/У(.
Изменение длины мышцы преобразуется в преобразователе 10 в величину пассивного напряжения, которое через блок 7 поступает на вход деления блока 11 в виде напряжения, соответствукадего силе, развиваемой мышечной тканью. На выходе блока 11 в результате деления силы на величину массы груза получаем параметр ускорения о , направленного против ускорения
силы тяжести.
Таким образом, в соответствии с входными параметрами и передаточными характеристиками блоков (фиг.2) модель находится в состоянии динамического равновесия и подготовлена для проведения экспериментального исследования. В зависимости от задач исследования изучаются характер изменения длины мышцы (выход 14 модели) и характеристики рецепторных потенциалов (выходы блоков 3,4 и 8) при возбуждении в различных комбинациях входов блоков 4 и 5 и изменении параметров модели. При подаче сигнала на вход блока 5 моделируется сокращение экстрафузальных мышечных йолокон, а сигнал с выхода этогб блока поступает на блок умножения блока 6. Произведение сигналов с выходов блока 5 и преобразователя 9 соответствует уровню развиваемого мышцей активного напряжения (сигнал с выхода блока умножений блока 6) при текущей длине мьш)цы. Сигнал с выхода блока 6 проходит через блок 7, на котором преобразуется в соответствии с соотношением упруго-вязких свойств, моделируемых в этом блоке, и вызывает изменение длины мышцы (выход 14) - укорочение, если груз (выход 15) не очень велик. Измэнивишйся сигнеш блока выхода 14 модели изменяет выходной сигнал преобразователя 9, и в системе экстрафузальное волокно-внешняя среда (замкнутой через блоки б, 7, 11, 12, 13, преобразователь 9, блок 6) устанавливается равновесие, связывающее между собой параметры массы (вход 15) ускорения (вход 16), длины мышцу (выход 14), величины сигнала, поступающего на вход блока 5. На выходе блоков 3 и 4 во всех случаях отражаются динамические и статические характеристики подаваемых на модель мышцы воздействий.
Передаточные функции блоков отражают упруго-вязкие свойства отдельных образований мышцы, характер которых выявлен в биологическом эксперименте .. Обозначенные на фиг.2 штриховые стрелки к блокам упруго-вязких свойств от блоков, воспроизводящих функцию сокращения, показывгиот возможность изменения соотношения упруго-вязких свойств активной и пассивной мышцы.
Введение в модель характеристики нелинейных элементов, отражающих зависимость преобразования длины реальной мышцы и ее активного и пассивного напряжений, выявлены также в биологическом эксперименте и задаются в модели методом кусочнолинейной аппроксимации с помощью стандартных нелинейных блоков, содержащих резистивно-диодные элементы.
Модель используется для изучения нейрональных механизмов управления мышечным сокращением и в этом случае выходы блоков 3, 4 и 8 замкнуты через нейронную структуру с входами блоков 1 и 5. Число первой и второй групп блоков может быть увеличено в различных задачах исследования. Коэффициенты передаточных функций выбираются таким образом, чтобы модель работала в реальном масштабе времени что позволяет непосредственно сравнивать результаты модельных экспериментов и экспериментов на живом объекте. Модель мышцы с нелинейным характером преобразования длины и напряжения позволяет расширить диапазон применимости модели и переносить данные модельного эксперимента на биологический объект во всем диапазоне изменения параметров, поступающих на вход модели мышцы.
Преимущество данной модели заключается прежде всего в том, что соответствие длины мышцы пассивному и активному напряжениям, параметрам внешней среды - массе и ускорению, устанавливается каждый момент по двум замкнутым контурам, в которые включены нелинейные элементы. Таким образом в модели происходит текущее решение дифференциальных уравнений, порядок которых определяется произведением последовательно расположенных передаточных характеристик в каждом контуре. Решение дифференциальных уравнений происходит во времени, и модель мышцы становится динамической моделью с проявлением переходных процессов на изменение входных величин.
Введение блока механические свойства внешней среды, в кртором про5исходит преобразование усилия, развиваемого экстрафузальными волокнами, в параметр ускорение, сообщаеMoviy подвижному звену, к которому прикреплены мышцы, и последующее преобразование ускорения в измене0ние длины мышцы, позволяет отказаться от использования параметра сила Р, введя параметры массы М и ускорения силы тяжести g . Это позволяет расширить рамки применимости модели,
5 так как появляется возможность изучать механизмы мышечного сокращения в условиях переменной силы тяжести.
Выделение в модели групп блоков позволяет простым количественным их
0 увеличением переходить к изучению взаимодействия как различных типов мышечных волокон в одной мйшце, так и к изучению координационной работы мышц при перемещении подвижного зве5на конечности относительно какоголибо сустава. Модель позволяет изучать механизмы развития силы и выполнения движений при изменении внутренних параметров мьоицы и ее рецепторного
0 аппарата и при различных iвнешних условиях воздействия на мышцу. Модель мышцы может быть использовала при конструировании бионических технических систем.
45
Формула изобретения
Модель мышцы, содержащая последовательно соединенные блоки., модели0рующие сократительные и упруго-вязкие свойства интрафузальных мышечных волокон, свойства рецепторных образований веретена, и последовательно соединенные блоки, моделирующие сократи5тельные и упруго-вязкие свойства экстрафузальных мышечных волокон и свойства рецепторного образования .сухожильного органа Гольджи, отличающаяся тем, что, с целью расширения функциональных свойств модели, в нее дополнительно введены преобразователи мышцы в активное и пассивное напряжение, блок преобразовании сокращения мышцы в активное напряжение, блок, моделирующий механические свойства
внешней среды, состоящий из последовательно соединенных блоков преобраэования усилия, развиваемого мышцей, в ускорение, ускорения - в скорость, скорости - в длину мышцы, причем один из входов блока преобразования рокращения мышцы в активное напряжение соединен с выходом блока, моделирующего сократительные свойства экстрафузальных мышечных волокон, а выход блока преобразования сокращения мышцы в активное напряжение соединен с одним из входов блока, моделирующего упруго-вязкие свойства экстрафузальных мышечных волокон, при этом входы блоков преобразования длины мышцы в активное и пассивное напряжение соединены с выходом блока преобразования скорости в длину мышцы, а выходы этих блоков соответственно соединены со ВТОРЫМИ входами блока преобразования сокращения мышцы в активное напряжение и блока, моделирующего упруго-вязкие свойства экстрафузсшьных мышечных волокон, выход которого соединен с одним из входов блока преобразования усилия, развиваемого мышцей, в ускорение, оди из входов которого соединен с источником сигнала, соответствующего массе воздействующих на мышцу грузов, второй вход блока преобразования ускорения в скорость соединен с источником сигнала, соответствующего ускорению .
Источники информации принятые во внимание при зкспертизе
1. Романов С.П. Моделирование механизмов спинального уровня управлением мышечны 1 сокращением. - Физиологический журнал, 1974, 10, с.15081517.


| название | год | авторы | номер документа |
|---|---|---|---|
| Модель мышцы | 1983 |
|
SU1164746A1 |
| Модель рецептора-мышечного веретена | 1987 |
|
SU1511752A1 |
| Устройство для моделирования нейронных структур двигательного аппарата | 1986 |
|
SU1585809A1 |
| Модель мышцы | 1982 |
|
SU1029761A1 |
| СПОСОБ ОЗДОРОВИТЕЛЬНОЙ ГИМНАСТИКИ М.Г. ТРИБУРТА | 2006 |
|
RU2333015C2 |
| СПОСОБ ПОВЫШЕНИЯ РАБОТОСПОСОБНОСТИ МЫШЦ | 1995 |
|
RU2118148C1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА НЕРВНО-МЫШЕЧНУЮ СИСТЕМУ ЧЕЛОВЕКА | 2006 |
|
RU2317806C1 |
| Многовекторная оздоровительная гимнастика | 2018 |
|
RU2725088C1 |
| Способ поддержания силы и жесткости постуральных мышц млекопитающих при их функциональной разгрузке | 2022 |
|
RU2800317C1 |
| СПОСОБ КОМПЛЕКСНОЙ РЕАБИЛИТАЦИИ БОЛЬНЫХ С ЦЕНТРАЛЬНЫМ СПАСТИЧЕСКИМ ПАРЕЗОМ ВЕРХНИХ КОНЕЧНОСТЕЙ | 2009 |
|
RU2422167C2 |