(21)4473422/30-15
(22)11.08.88
(46) 15.11.90. Бюл. № 42
(71)Научно-исследовательский и проектно- технологический институт механизации и электрификации сельского хозяйства Нечео- ноземной зоны РСФСР
(72)В И. Головков, Л. Г. Хоцко, В. В. Иванов, Б. А. Елохин
и В. Н. Арзамасцев
(53)631.22.014(088.8)
(56)Заявка ФРГ № 2025209 кл. А 01 К 5/02, 1978.
(54)УСТРОЙСТВО ДЛЯ НОРМИРОВАН НОЙ РАЗДАЧИ ЖИДКОГО КОРМ
(57)Изобретение относится к сельскому хозяйству, а именно к животноводству на поо- мышленной основе, и может быть использовано для раздачи животным жидкого корма в условиях крупных животноводческих ферм и комплексов. Цель изобретения - повьГшение точности дозирования. Блок 8 управления дозированием содержит интегратор, включаемый в работу только при открытии одного из раздаточных кранов 14 выдачи коома в кормушку 13. Интегральное значениеТигна ла мгновенного расхода корма, получаемое с помощью расходомера 6, непрерывно сравни вается с сигналом задатчика доз корма величина значения которого может изменяться со сколь угодно малым шагом дискретизации При равенстве сигналов схема сравнения блока 8 управления дозированием выраба тывает сигнал на коммутатор 9, который посредством мобильного привода 17 перекрывает предыдущий раздаточный кран 14 и открьшает последующий. По сигналу датчика 15 положения раздаточного крана 4 коммутатор 9, управляя приводом 1Ь магистральной задвижки Ц пепе копмГ Р Д° «РаЩая ЦИРКУЛЯЦИЮ кормов по кольцу трубопровода 2 и обес печивая точную выдачу заданного количест- ва корма в кормушку 13. 5 ил.
(С
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655406A1 |
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655407A1 |
| Устройство для автоматического дозирования жидких кормов | 1987 |
|
SU1475562A1 |
| Устройство для раздачи жидких кормов | 1990 |
|
SU1743511A1 |
| Устройство для раздачи жидких кормов | 1981 |
|
SU1001897A1 |
| Кормораздатчик | 1987 |
|
SU1516072A1 |
| Устройство для управления дозатором мобильного кормораздатчика | 1984 |
|
SU1168159A1 |
| Способ приготовления, раздачи текучих кормов и группового кормления животных | 1988 |
|
SU1604292A1 |
| Раздатчик жидких кормов | 1988 |
|
SU1584851A1 |
| Устройство для автоматической раздачи корма | 1980 |
|
SU897187A1 |
Изобретение относится к сельскому хозяйству, а именно к животноводству на промышленной основе, и может быть использовано для раздачи животным жидкого корма в условиях крупных животноводческих ферм и комплексов. Цель изобретения - повышение точности дозирования. Блок 8 управления дозирование содержит интегратор, включаемый в работу только при открытии одного из раздаточных кранов 14 выдачи корма в кормушку 13. Интегральное значение сигнала мгновенного расхода корма, получаемое с помощью расходомера 6, непрерывно сравнивается с сигналом задатчика доз корма, величина значения которого может изменяться со сколь угодно малым шагом дискретизации. При равенстве сигналов схема сравнения блока 8 управления дозированием вырабатывает сигнал на коммутатор 9, который посредством мобильного привода 17 перекрывает предыдущий раздаточный кран 14 и открывает последующий. По сигналу датчика 15 положения раздаточного крана 14 коммутатор 9, управляя приводом 16 магистральной задвижки 11, перекрывает ее, предотвращая циркуляцию кормов по кольцу трубопровода 2 и обеспечивая точную выдачу заданного количества корма в кормушку 13. 5 ил.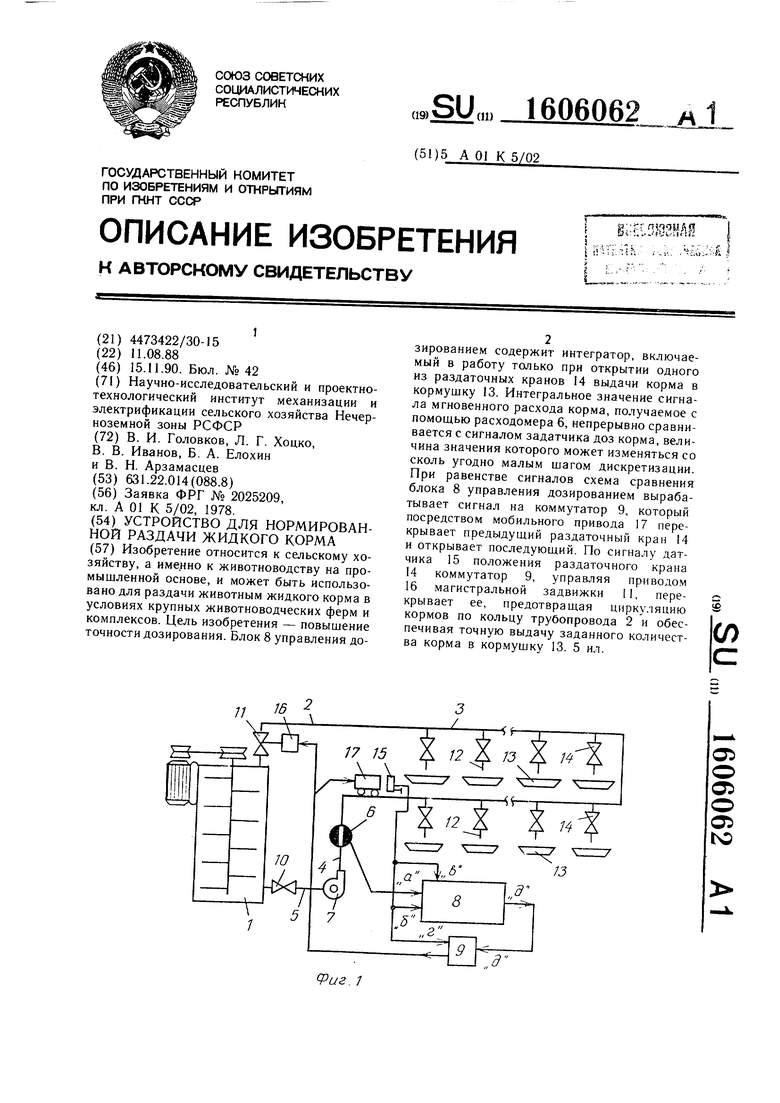
Рае. 1
О) О Ci
о
05
ьо
а
Изобретение относится к сельскому хозяйству, а именно к животноводству на промышленной основе, и может быть использовано для раздачи животным жидкого корма в условиях крупных животноводческих ферм и комплексов.
Цель изобретения - повышение точности дозирования.
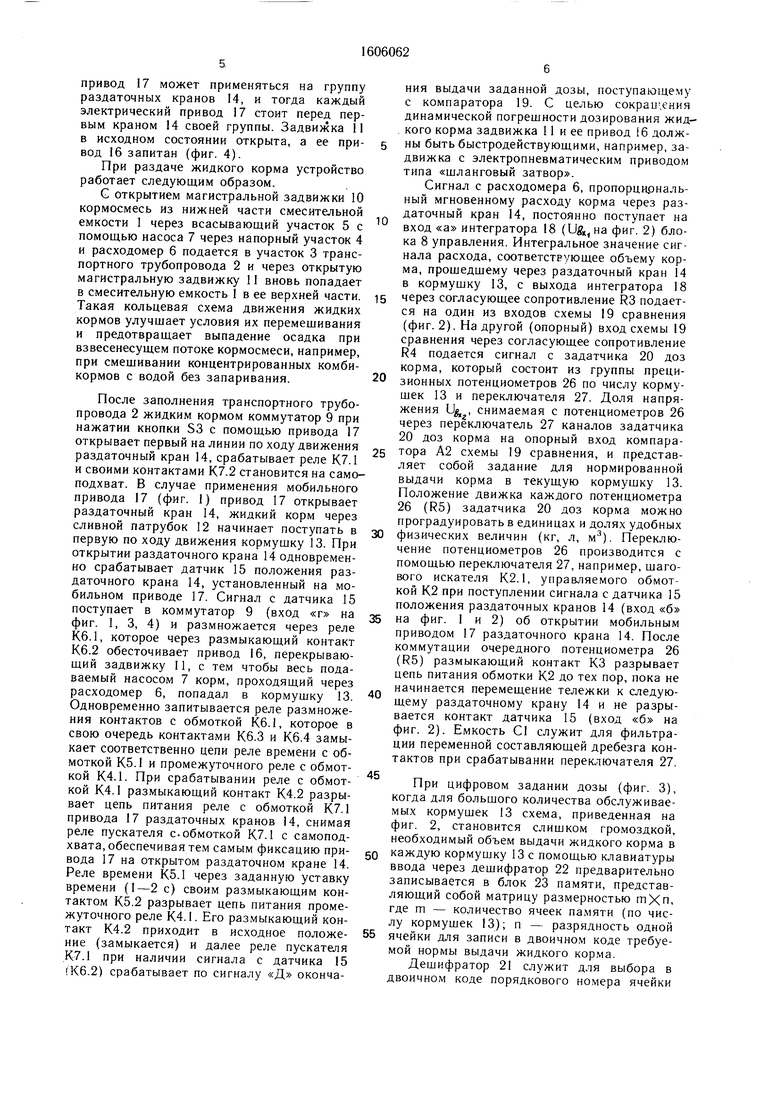
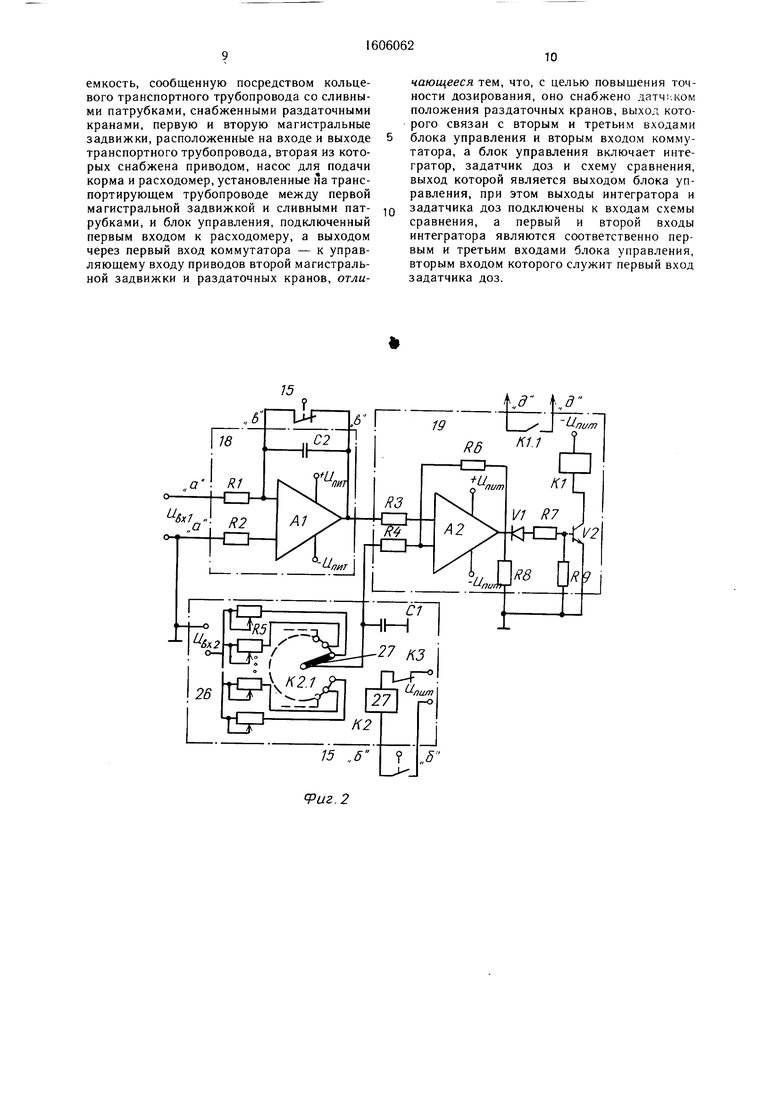
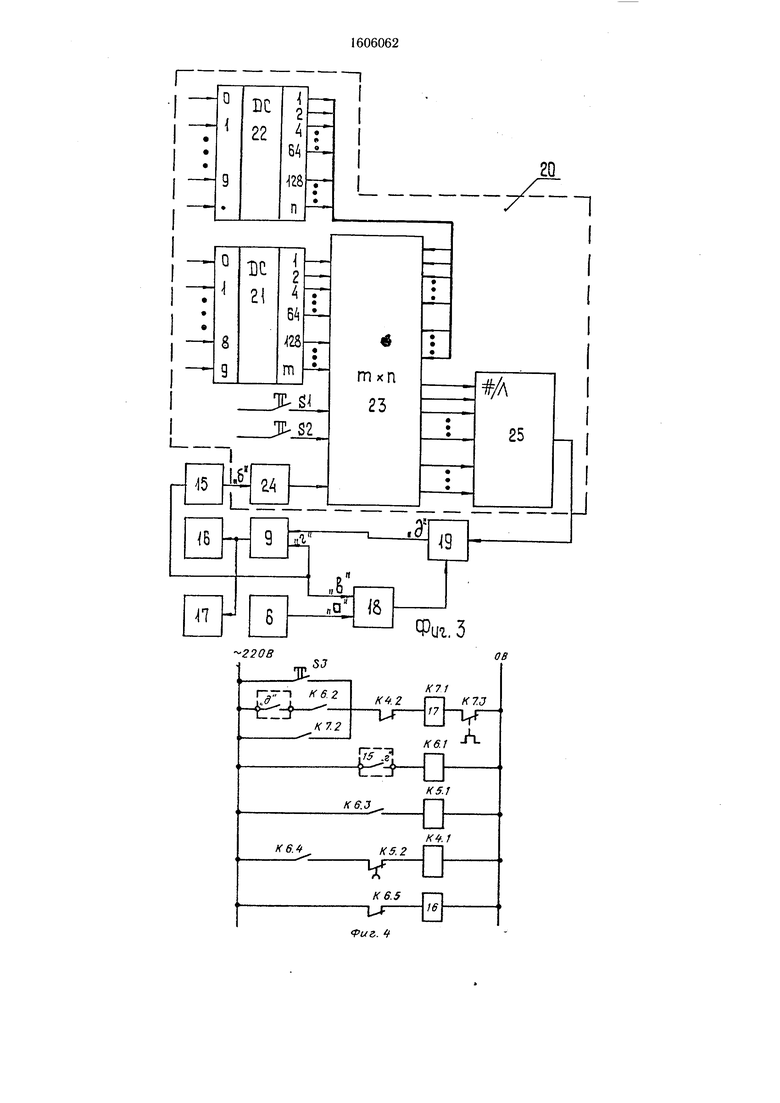
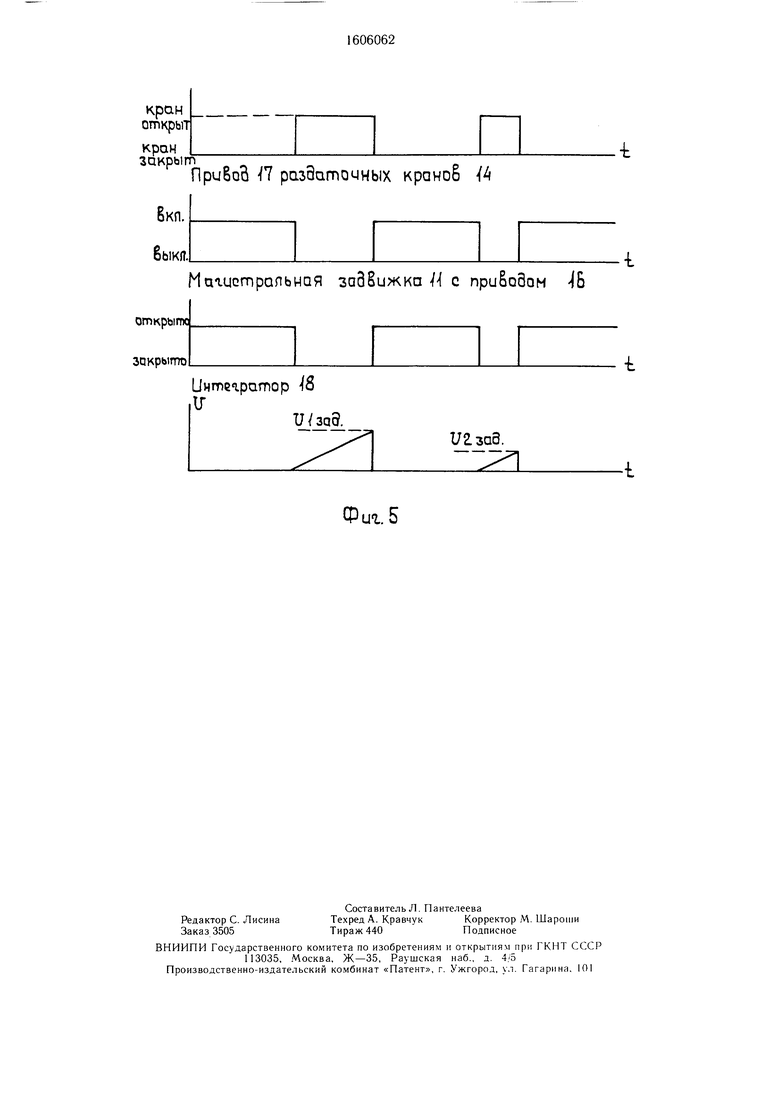
На фиг. 1 представлена схема устройства нормированной выдачи жидкого корма с системой задания и управления нормой выдачи; на фиг. 2 - принципиальная электрическая схема управления диференциро- ванной, нормированной выдачей порции корма в каждую кормушку; на фиг. 3 - функциональная схема управления дифференцированной, нормированной выдачей порции корма животным при цифровом принципе задания программы кормления; на фиг. 4 - принципиальная электрическая схема коммутатора, выполненная на релейных элементах; на фиг. 5 - временные диаграммы работы узлов и блоков устройства.
Устройство для нормированной раздачи жидкого корма содержит смесительную емкость 1, транспортный трубопровод 2 с участками 3-5 расходомер 6, насос 7 подачи кормов, блок 8 управления и коммутатор 9. Емкость 1 в нижней своей части соединена через магистральную задвижку 10, участок 5 трубопровода 2 со всасываюш,им патрубком насоса 7 лодачи кормов. Расходомер 6 при помощи участка 4 трубопровода 2 связан с нагнетательным патрубком насоса 7 подачи кормов, а при помоши участа 3 трубопровода 2 связан через магистральную задвижку 11 со смесительной емкостью 1 в верхней ее части. Участок 3 трубопровода 2 оборудован сливными патрубками 12 для выдачи жидкого корма в кормушки 13 через раздаточные краны 14. Блок 8 управления своими входами подключен к расходомеру 6 (вход «а, фиг. 1), к датчику 15 (входы «б и «в на фиг. 1) положения раздаточных кранов 14, а выходом - к коммутатору 9 (выход «д на фиг. 1), в свою очередь также подключенному входом к датчику 15 (вход «г на фиг. 1), а выходом - к приводу 16 магистральной задвижки 11 и приводу 17 раздаточных кранов 14. Привод 17 может быть электромагнитным, пневматическим, гидравлическим и стационарным, установленным на каждый раздаточный кран 14, или мобильным с установленным на нем датчиком 15. Блок 8 управления содержит интегратор 18, подключенный входами к расходомеру 6 (вход «а на фиг. 2) и датчику 15 (вход «в на фиг. 2), а выходном - к схеме 19 сравнения сигналов, второй вход которой связан с задатчиком 20 доз корма. Задат- чик 20 доз корма (количества корма в каждую кормушку) в одном варианте изготовления (фиг. 3) может содержать дешифраторы 21 и 22 соответственного выбора номера кормушки 13 и задания дозы, связанные с блоком 23 памяти, управляемым счетчиком 24 числа кормушек 13, а также кнопками S1 и S2, реализующими режим записи и считывания информации. Выход блока 23 памяти связан с входом цифроаналогового преобразователя 25, выход которого подключен к одному из входов схемы 19 сравнения. В другом варианте изготовления (фиг. 2) задатчик 20 доз корма может содержать прецизионные потенциометры 26 (25), связанные через переключатель 27 каналов, выполненный в виде шагового искателя К2.Г, управляемого обмоткой К2, с одним из входов схемы 19 сравнения. На фиг. 2 для 5 упрощенного описания сущности работы устройства размыкающий контакт КЗ, датчик 15 и переключатель 27 каналов изображены в виде контактных устройств. Для повыщения надежности в работе схемы переключающие устройства могут быть выполнены ° бесконтактными, например, по известным схемам двухпозиционных электронных ключей и мультиплексоров.
В случае выполнения коммутатора 9 на релейных элементах (фиг. 4) в его состав 5 входят реле с обмоткой К4.1 и контактом К4.2, кнопка S3 начального запуска приво- да 17 раздаточных кранов 14, реле с обмоткой К5.1 и контактом КБ.2, реле с обмоткой К6.1 и контактами К6.2 - К6.5 и реле с обмоткой К7.1 и контактами К7.2, К7.3. Интегратор 30 18 может быть выполнен, например, на операционном усилителе А1, входные сопротивления которого R1 и R2 служат для согласования уровней входного напряжения, а емкость С2 вместе с RI определяют постоянную интегрирования. Схема 19 сравнения 35 сигналов может содержать диод V 1, транзисторный ключ V 2 согласующие сопротивления R3, К4, операционный усилитель А2 и сопротивления R6-R9 создания требуемых электрических режимов.
В исходном состоянии смесительная ем кость 1 заполнена заранее приготовленной жидкой кормосмесью требуемой консистенции. При приготовлении кормосмеси задвижка 10 закрыта и препятствует попаданию кормосмеси в транспортный трубопровод 2. 45 Раздаточные краны 14 в кормушки 13 закрыты, а их приводы 17 обесточены, если ча каждый раздаточный кран 14 существуе свой электромагнитный (пневматический, гидравлический) привод 17. При условии применения в качестве привода 17 мобиль- 50 ного электропривода, (фиг. 1), например электродвигателя с редуктором, движущегося вдоль участка 3 транспортного трубопровода 2 и имеющего приспособление для открытия и закрытия раздаточного крана 14, то в исходном состоянии он находится в 55 начале линии кормления, т. е. перед первой кормушкой 13 по ходу движения кормов. Если количество кормушек 13 достаточно велико, то один мобильный электрический
привод 17 может применяться на группу раздаточных кранов 14, и тогда каждый электрический привод 17 стоит перед первым краном 14 своей группы. Задвижка 11 в исходном состоянии открыта, а ее при- вод 16 запитан (фиг. 4).
При раздаче жидкого корма устройство работает следующим образом.
G открытием магистральной задвижки 10 кормосмесь из нижней части смесительной емкости 1 через всасывающий участок 5с помощью насоса 7 через напорный участок 4 и расходомер 6 подается в участок 3 транспортного трубопровода 2 и через открытую магистральную задвижку 11 вновь попадает в смесительную емкость 1 в ее верхней части. Такая кольцевая схема движения жидких кормов улучшает условия их перемешивания и предотвращает выпадение осадка при взвесенесущем потоке кормосмеси, например, при смешивании концентрированных комбикормов с водой без запаривания.
После заполнения транспортного трубопровода 2 жидким кормом коммутатор 9 при нажатии кнопки S3 с помощью привода 17 открывает первый на линии по ходу движения раздаточный кран 14, срабатывает реле К7.1 и своими контактами К7.2 становится на самоподхват. В случае применения мобильного привода 17 (фиг. 1) привод 17 открывает раздаточный кран 14, жидкий корм через сливной патрубок 12 начинает поступать в первую по ходу движения кормущку 13. При открытии раздаточного крана 14 одновременно срабатывает датчик 15 положения раздаточного крана 14, установленный на мобильном приводе 17. Сигнал с датчика 15 поступает в коммутатор 9 (вход «г на фиг. 1, 3, 4) и размножается через реле К6.1, которое через размыкающий контакт К6.2 обесточивает привод 16, перекрывающий задвижку II, с тем чтобы весь подаваемый насосом 7 корм, проходящий через расходомер 6, попадал в кормушку 13. Одновременно запитывается реле размножения контактов с обмоткой К6.1, которое в свою очередь контактами К6.3 и К6.4 замыкает соответственно цепи реле времени с обмоткой К5.1 и промежуточного реле с обмоткой К4.1. При срабатывании реле с обмот- кой К4.1 размыкающий контакт К4.2 разрывает цепь питания реле с обмоткой К7.1 привода 17 раздаточных кранов 14, снимая реле пускателя с.обмоткой К7.1 с самоподхвата, обеспечивая тем самым фиксацию привода 17 на открытом раздаточном кране 14. Реле времени К5.1 через заданную уставку времени (1-2 с) своим размыкающим контактом К5.2 разрывает цепь питания промежуточного реле К4.1. Его размыкающий контакт К4.2 приходит в исходное положе- ние (замыкается) и далее реле пускателя К7.1 при наличии сигнала с датчика 15 (Кб.2) срабатывает по сигналу «Д окончания выдачи заданной дозы, поступающему с компаратора 19. С целью coкpau eния динамической погрешности дозирования жидкого корма задвижка 11 и ее привод 16 должны быть быстродействующими, например, задвижка с электропневматическим приводом типа «шланговый затвор.
Сигнал с расходомера 6, пропорцирналь- ный мгновенному расходу корма через раздаточный кран 14, постоянно поступает на вход «а интегратора 18 (U&, на фиг. 2) блока 8 управления. Интегральное значение сигнала расхода, соответствующее объему корма, прошедщему через раздаточный кран 14 в кормущку 13, с выхода интегратора 18 через согласующее сопротивление R3 подается на один из входов схемы 19 сравнения (фиг. 2). На другой (опорный) вход схемы 19 сравнения через согласующее сопротивление R4 подается сигнал с задатчика 20 доз корма, который состоит из группы прецизионных потенциометров 26 по числу кормушек 13 и переключататя 27. Доля напряжения , снимаемая с потенциометров 26 через переключатель 27 каналов задатчика 20 доз корма на опорный вход компаратора А2 схемы 19 сравнения, и представляет собой задание для нормированной выдачи корма в текущую кормущку 13. Положение движка каждого потенциометра 26 (R5) задатчика 20 доз корма можно проградуировать в единицах и долях удобных физических величин (кг, л, м). Переключение потенциометров 26 производится с помощью переключателя 27, например, щаго- искателя К2.1, управляемого обмоткой К2 при поступлении сигнала с датчика 15 положения раздаточных кранов 14 (вход «б на фиг. 1 и 2) об открытии мобильным приводом 17 раздаточного крана 14. После коммутации очередного потенциометра 26 (R5) размыкающий контакт КЗ разрывает цепь питания обмотки К2 до тех пор, пока не начинается перемещение тележки к следующему раздаточному крану 14 и не разрывается контакт датчика 15 (вход «б на фиг. 2). Емкость С1 служит для фильтрации переменной составляющей дребезга контактов при срабатывании переключателя 27.
При цифровом задании дозы (фиг. 3), когда для больщого количества обслуживае- мых кормушек 13 схема, приведенная на фиг. 2, становится слишком громоздкой, необходимый объем выдачи жидкого корма в каждую кормущку 13с помощью клавиатуры ввода через дешифратор 22 предварительно записывается в блок 23 памяти, представляющий собой матрицу размерностью гпХп, где m - количество ячеек памяти (по чис- лу кормушек 13); п - разрядность одной ячейки для записи в двоичном коде требуемой нормы выдачи жидкого корма.
Дешифратор 21 служит для выбора в двоичном коде порядкового номера ячейки
памяти, в регистры которой и записывается код нормы выдачи через дешифратор 22. При раздаче корма программа кормления, записанная в блок 23 памяти, извлекается по коду выборки, формируемому двоичным счетчико л 24, осуществляющему счет числа срабатываний датчика 15, т. е. числа кормушек 13, в которое произведена выдача корма, поскольку открытие раздаточных кранов 14 осуш,ествляется последовательно. Кнопки S1 и S2 служат для задания соответственно режимов записи и считывания содержимого блока 23 памяти. При выдаче нормы, предназначенной для первой кормущ- ки 13 по двоичному коду счетчика 24 (0000.0001) из блока 23 памяти на вход цифроаналогового преобразователя 25 извлекается содержимое (в двоичном коде) первой ячейки памяти, где преобразуется в пропорциональный аналоговый сигнал, подаваемый на опорный вход компаратора А2 схемы 19 сравнения (через R4, фиг. 2).
В компараторе 19 сравниваются уровни опорного сигнала, соответствующего заданной норме выдачи корма и текущего значения расхода корма или (аналогично) - объема корма, поступающего в кормушку 13 с момента открытия раздаточного крана 14. При равенстве значений сигналов на опорном (задающем) и измерительном входах на выходе компаратора А2 схемы 19 сравнения вырабатывается сигнал, открывающий транзисторный ключ V2, что вызывает срабатывание реле К1 (фиг. 2), которое своим замыкающим контактом К1-1 подает команду на коммутатор 9 (выход «д на фиг. 1-4). Поскольку раздаточный кран 14 находится в открытом положении, датчик 15 положения замкнут, а следовательно, замкнут контакт Кб.2, то с приходом сигнала «Д реле пускателя с обмоткой К7.1 вновь запиты- вается и становится на самоподхват по контакту К7.2. При закрытии крана 14 датчик 15 разрывает цепь питания реле размножения контактов с обмоткой К6.1, вновь запитывается электромагнит привода 16, обеспечивая открытие магистральной задвижки 11 и ее поддержание в открытом положении. Хотя контакт К6.2 при закрытии раздаточного крана 14 разрывается, но реле с обмоткой К7.1 пускателя привода 17 продолжает удерживаться включенным за счет самоподхвата через контакт К7.2 до подхода привода 17 к следующему раздаточному крану 14 при срабатывании реле К4-.1. Далее работа коммутатора повторяется. Сопротивления R6-R9 компаратора служат для создания требуемых электрических режимов работы схемы 19 сравнения и транзисторного ключа V2, а диод VI - для предотвращения включения ключа на низких потенциалах до изменения полярности напряжения на выходе компаратора А2.
При движении мобильного, привода 17 к следующему раздаточному крану 14 размыкающий контакт датчика 15 положения замыкается (вход «в на фиг. 1-3), щунтируя конденсатор С2 (фиг. 2), что приводит интегратор 18 в исходное состояние (обнуляет)
и блокирует его работу на весь период движения мобильного привода 17 от одного раздаточного крана 14 к другому. При открытии мобильным приводом 17 следующего раздаточного крана 14 срабатывает датчик 15 положения, размыкая свой контакт в цепи, шунтирующей емкости С2, интегратора 18 (фиг. 2), начинающего после этого интегрировать выходной сигнал расходомера 6. Одновременно по сигналу датчика 15 положения раздаточного крана 14 срабатывает обмотка щагового искателя К2, переключая вход схемы 19 сравнения на следующий по счету потенциометр 26(R5), по схеме (фиг. 2) или по схеме (фиг. 3) к выходному коду двоичного счетчика 24 прибавляется единица, что ведет к извлечению из блока 23 памяти
кода, записанного в ячейке по адресу, указанному выходным кодом счетчика 24.
Далее устройс1во отрабатывает цикл, аналогичный указанному. Позаверщении вы- 5 дачи корма в последнюю кормушку 13 смесительная емкость 1 должна полностью опорожниться и в нее подается вода для вымывания остатков корма из транспортного трубопровода 2. Остатки корма, разбавленные водой, могут быть собраны в смеситель- 0 ную емкость 1 и использованы в приготовлении кормосмеси при следующем кормлении.
Устройство при непрерывном измерении расхода потока и непрерывном интегрировании сигнала расхода до заданного задатчи- 5 ком значения позволяет обеспечить точность дозирования,ограничиваемую лишь классом точности прибора, применяемого для измерения расхода. Например, широко используемый для измерения расхода электропроводных сред, к которым относятся и жидкие корма, электромагнитный расходомер типа ИР-61 имеет выходной унифицированный электрический сигнал, пропорциональный расходу и относительную погрешность измерения расхода ±1%. Кроме того, конструк- 45 ция устройства упрощается за счет устранения из системы трубопроводов компенсационного бака переменной емкости и манометра с датчиком достижения в трубопроводе требуемого давления. Замена группы приводов для открытия раздаточных кранов 50 одним приводом тоже упрощает систему, удещевляет стоимость монтажа и эксплуатации, а также повышает надежность устройства для нормированной раздачи жидкого корма.
55Формула изобретения
Устройство для нормированной раздачи жидкого корма, содержащее смесительную
40
емкость, сообщенную посредством кольцевого транспортного трубопровода со сливными патрубками, снабженными раздаточными кранами, первую и вторую магистральные задвижки, расположенные на входе и выходе транспортного трубопровода,вторая из которых снабжена приводом, насос для подачи корма и расходомер, установленные на транспортирующем трубопроводе между первой магистральной задвижкой и сливными патрубками, и блок управления, подключенный первым входом к расходомеру, а выходом через первый вход коммутатора - к управляющему входу приводов второй магистральной задвижки и раздаточных кранов, отли
tS- 2
15 „5
Риг.2
чающееся тем, что, с целью повышения точности дозирования, оно снабжено датчиком положения раздаточных кранов, выход которого связан с вторым и третьим входами блока управления и вторым входом коммутатора, а блок управления включает интегратор, задатчик доз и схему сравнения, выход которой является выходом блока управления, при этом выходы интегратора и задатчика доз подключены к входам схемы сравнения, а первый и второй входы интегратора являются соответственно первым и третьим входами блока управления, вторым входом которого служит первый вход задатчика доз.
Магистральная заЗВижка Ц с приБоЗом -JB
Унтсаратор 8 1Г
и/заЭ.
Фиг. 5
игзаб.
;
