Изобретение относится к сельскому хозяйству, а именно к животноводству на промышленной основе, и может быть использовано в системах кормораздачи.
Целью изобретения является повышение точности дозирования путем учета физико-механических свойств жидкого корма.
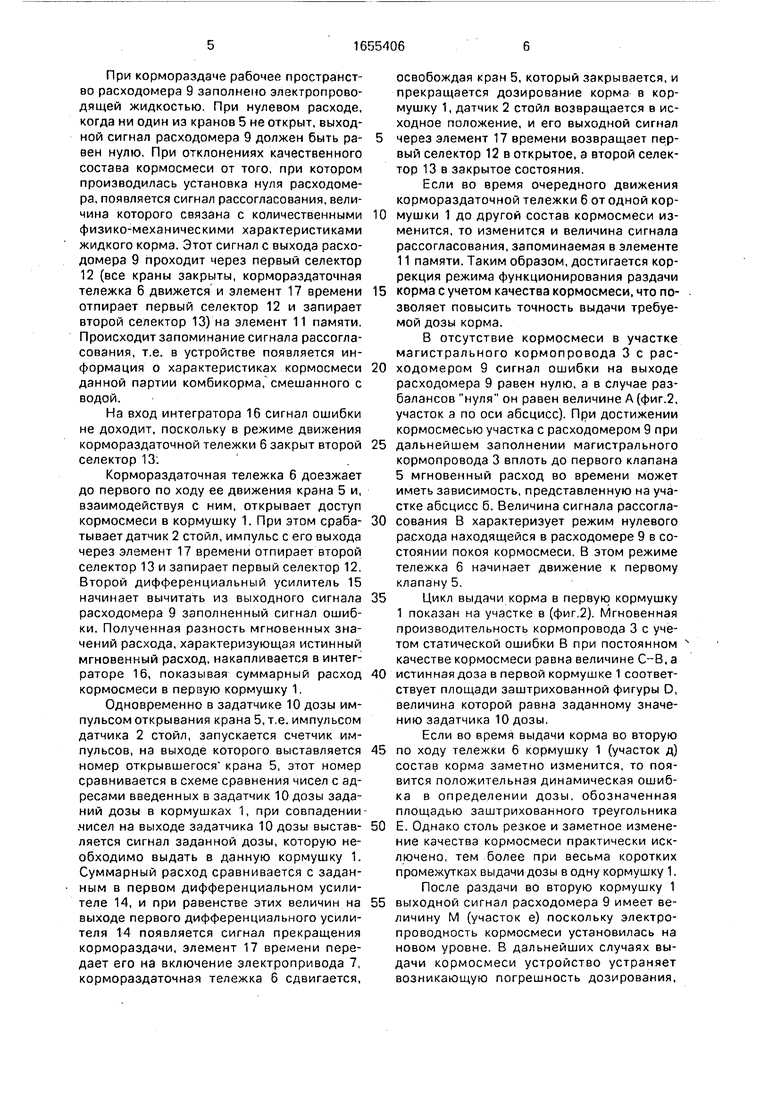
На фиг. 1 представлена схема устройства; на фиг.2 - циклограмма работы устройства.
Устройство для раздачи жидкого корма содержит кормушки 1, датчики 2 стойл животных, магистральный кормопровод 3 с раздаточными патрубками 4, каждый из которых снабжен краном 5, кормораздаточную тележку 6 с электроприводом 7, установленную с возможностью взаимодействия в процессе перемещения с кранами 5 И датчиками стойл, выходы которых объединены и связаны с первым входом блока 8 управления, второй вход которого соединен с) выходом расходомера 9, а выход - с электроприводом 7 кормораздаточной тележки 8, при этом блок 8 управления содержит задатчик 10 дозы, элемент 11 памяти, первый 12 и второй 13 селекторы, первый 14 и второй 15 дифференциальные усилители, интегратор 16 и элемент 17 времени, пер- ный вход которого объединен с входом за- датчика 10 дозы и является первым входом блока 8 управления, второй вход связан с ЕШХОДОМ первого дифференциального усилителя 14, первый выход соединен с первыми входами первого 12 и второго 13 селекторов, а второй выход является выходом блока 8 управления, при этом второй вход первого селектора 12 и неинвертирующий вход второго дифференциального усилителя 15 объединены, являются вторым входом блока 8 управления и связаны с выходом расходомера 9, причем выход первого селектора 12 через элемент 11 памяти подключен к инвертирующему входу второго дифференциального усилителя 15, выход которого связан с вторым входом второго селектора 13, а выход последнего через интегратор 16 соединен с инвертирующим
входом первого дифференциального усилителя 14, к неинвертирующему входу которого подключен выход задатчика 10 дозы.
В качестве расходомера 5 используется индукционный расходомер ИР - 61, задатчик 10 дозы представляет собой программируемое адресное устройство на базе интегральных микросхем серии 155 и аналогичных с кнопочным наборным полем кодов адреса (номера кормушки 1) с соответствующим кодом задания (дозы). В задатчике 10 происходит сравнение сформированного по сигналам датчиков 2 стойл кода адреса открытого клапана 5 с заданными по программе кормления кодами адресов кормушек 1 и
автоматическая установка заданного программного значения дозы.
Интегратор 16 выполнен по известной схеме последовательного соединения преобразователя напряжение - частота и
счетчика. Элемент 11 памяти построен на преобразователе напряжение - код с триг- герными ячейками.
Элемент 17 времени производит отпирание первого селектора 12 с одновременным запиранием второго селектора 13, и
наоборот, а также включает и выключает
электропривод 7 тележки 6, причем все эти
операции выполняет с требуемыми временными задержками. В состав элемента 17
времени входят усилители, ждущие мультивибраторы и аналогичные импульсные устройства в микроэлектронном исполнении на интегральных схемах. Датчики 2 стойл представляют собой обычные подпружиненные кнопки.
Устройство для раздачи жидкого корма работает следующим образом.
При кормораздаче рабочее пространство расходомера 9 заполнено электропроводящей жидкостью. При нулевом расходе, когда ни один из кранов 5 не открыт, выходной сигнал расходомера 9 должен быть равен нулю, При отклонениях качественного состава кормосмеси от того, при котором производилась установка нуля расходомера, появляется сигнал рассогласования, величина которого связана с количественными физико-механическими характеристиками жидкого корма. Этот сигнал с выхода расходомера 9 проходит через первый селектор 12 (все краны закрыты, кормораздаточная тележка 6 движется и элемент 17 времени отпирает первый селектор 12 и запирает второй селектор 13) на элемент 11 памяти. Происходит запоминание сигнала рассогласования, т.е. в устройстве появляется информация о характеристиках кормосмеси данной партии комбикорма, смешанного с водой.
На вход интегратора 16 сигнал ошибки не доходит, поскольку в режиме движения кормораздаточной тележки 6 закрыт второй селектор 13.
Кормораздаточная тележка 6 доезжает до первого по ходу ее движения крана 5 и, взаимодействуя с ним, открывает доступ кормосмеси в кормушку 1. При этом срабатывает датчик 2 стойл, импульс с его выхода через элемент 17 времени отпирает второй селектор 13 и запирает первый селектор 12. Второй дифференциальный усилитель 15 начинает вычитать из выходного сигнала расходомера 9 заполненный сигнал ошибки. Полученная разность мгновенных значений расхода, характеризующая истинный мгновенный расход, накапливается в интеграторе 16, показывая суммарный расход кормосмеси в первую кормушку 1.
Одновременно в задатчике 10 дозы импульсом открывания крана 5, т.е. импульсом датчика 2 стойл, запускается счетчик импульсов, на выходе которого выставляется номер открывшегося крана 5, этот номер сравнивается в схеме сравнения чисел с адресами введенных в задатчик 10 дозы заданий дозы в кормушках 1, при совпадении- .чисел на выходе задатчика 10 дозы выставляется сигнал заданной дозы, которую необходимо выдать в данную кормушку 1. Суммарный расход сравнивается с заданным в первом дифференциальном усилителе 14, и при равенстве этих величин на выходе первого дифференциального усилителя 14 появляется сигнал прекращения кормораздачи, элемент 17 времени передает его на включение электропривода 7, кормораздаточная тележка 6 сдвигается,
освобождая кран 5, который закрывается, и прекращается дозирование корма в кормушку 1, датчик 2 стойл возвращается в исходное положение, и его выходной сигнал
через элемент 17 времени возвращает первый селектор 12 в открытое, а второй селектор 13 в закрытое состояния.
Если во время очередного движения кормораздаточной тележки 6 от одной кор0 мушки 1 до другой состав кормосмеси изменится, то изменится и величина сигнала рассогласования, запоминаемая в элементе 11 памяти. Таким образом, достигается коррекция режима функционирования раздачи
5 корма с учетом качества кормосмеси, что позволяет повысить точность выдачи требуемой дозы корма.
В отсутствие кормосмеси в участке магистрального кормопровода 3 с рас0 ходомером 9 сигнал ошибки на выходе расходомера 9 равен нулю, а в случае разбалансов нуля он равен величине А (фиг.2, участок а по оси абсцисс). При достижении кормосмесью участка с расходомером 9 при
5 дальнейшем заполнении магистрального кормопровода 3 вплоть до первого клапана 5 мгновенный расход во времени может иметь зависимость, представленную на участке абсцисс б. Величина сигнала рассогла0 сования В характеризует режим нулевого расхода находящейся в расходомере 9 в состоянии покоя кормосмеси. В этом режиме тележка 6 начинает движение к первому клапану 5.
5Цикл выдачи корма в первую кормушку
1 показан на участке в (фиг.2). Мгновенная производительность кормопровода 3 с учетом статической ошибки В при постоянном качестве кормосмеси равна величине С-В, а
0 истинная доза в первой кормушке 1 соответствует площади заштрихованной фигуры D, величина которой равна заданному значению задатчика 10 дозы.
Если во время выдачи корма во вторую
5 по ходу тележки 6 кормушку 1 (участок д) состав корма заметно изменится, то появится положительная динамическая ошибка в определении дозы, обозначенная площадью заштрихованного треугольника
0 Е. Однако столь резкое и заметное изменение качества кормосмеси практически исключено, тем более при весьма коротких промежутках выдачи дозы в одну кормушку 1. После раздачи во вторую кормушку 1
5 выходной сигнал расходомера 9 имеет величину М (участок е) поскольку электропроводность кормосмеси установилась на новом уровне. В дальнейших случаях выдачи кормосмеси устройство устраняет возникающую погрешность дозирования,
соответствующую площади фигуры К (участок ж), которая зависит от программных значений доз в следующих кормушках 1.
Таким образом, устройство позволяет достичь повышение точности дозирования при раздаче кормов, особенно ощутимое при изменении качественного состава комбикормов от одной партии к другой, что обеспечивает экономию жидких кормов при одновременном повышении продуктивно- cf и сельскохозяйственных животных за счет строгого соблюдения зоотехнических требований к кормам.
Ф о рмул а и зоб ретен и я
Устройстёо для раздачи жидкого корма, содержащее кормушки, датчики стойл, магистральный кормопровод с раздаточными патрубками, каждый из которых снабжен краном, кормораздаточную тележку с электроприводом, установленную с возможностью взаимодействия в процессе перемещения с кранами и датчиками стойл, выходы которых объединены и связаны с первым входом блока управления, включа- ющего задатчик дозы, при этом второй вход блока управления соединен с выходом расходомера, а выход-с электроприводом кормораздаточной тележки, отличающее- с я тем, что, с целью повышения точности дозирования путем учета физико-механических свойств жидкого корма, блок элемента управления снабжен элементом памяти, двумя селекторами, двумя дифференциальными усилителями и интегратором, элементом времени, перйый вход которого объединен с входом задатчика дозы и является первым входом блока управления, второй вход связан с выходом первого дифференциального усилителя1, первый выход соединен с первыми1 входами первого и второго селекторов, а второй выход является выходом блока управления, при этом второй вход первого селектора и неинвертирующий вход второго дифференциального усилителя объединены и являются вторым входом блока управления, причем выход первого селектора через элемент памяти подключен к инвертирующему входу второго дифференциального усилителя, выход которого связан с вторым входом второго селектора, а выход последнего через интегратор соединен с инвертирующим входом первого дифференциального усилителя, к неинвертирующему входу которого подключен выход задатчика дозы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздачи жидкого корма | 1988 |
|
SU1655407A1 |
| Устройство для автоматического дозирования жидких кормов | 1987 |
|
SU1475562A1 |
| Устройство для нормированной раздачи жидкого корма | 1988 |
|
SU1606062A1 |
| Устройство для раздачи жидких кормов | 1990 |
|
SU1743511A1 |
| Устройство для раздачи жидких кормов | 1983 |
|
SU1205844A1 |
| Способ дозированного кормления птицы и устройство для его осуществления | 1988 |
|
SU1588343A1 |
| Способ раздачи кормов в устройство для его осуществления | 1986 |
|
SU1496730A1 |
| Устройство управления кормораздачей | 1976 |
|
SU662049A1 |
| СПОСОБ РАЗДАЧИ КОРМА СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПТИЦЕ, СОДЕРЖАЩЕЙСЯ В ТРЕХЪЯРУСНОЙ КЛЕТОЧНОЙ БАТАРЕЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2100926C1 |
| Кормораздатчик | 1983 |
|
SU1118324A1 |
Изобретение относится к сельскому хозяйству, а именно к промышленному животноводству, и может быть использовано в системах кормораздачи. Цель изобретения - повышение точности дозирования путем учета физико-механических свойств жидкого корма. Устройство для раздачи жидкого корма содержит кормушки 1, магистральный кормопровод 3, снабженный раздаточными патрубками 4, каждый из которых оснащен краном 5. Кормораздаточная тележка 6 с электроприводом 7 установлена с возможностью взаимодействия в процессе перемещения с кранами 5 и датчиками 2 стойл животных. Выходы датчиков 2 всех стойл в животноводческом помещении объединены и связаны с первым входом блока 8 управления, второй вход которого соеди
Выходной сигнал расходомера (мгнобенныйрасход), м /с
ж врещс
| Устройство для раздачи жидких кормов | 1983 |
|
SU1205844A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
