Изобрете1П)е относится к электроприводам по системе управляемы } преобразователь - двигатель постоянного тока с подчи- HciiHhiM )егулнропанием н может быть использовано в электроприводах механизмов Поворота одноковшовых экскаваторов, а в механизмах поворота и поступатель- fforo перемещения кранов и в подобных им механизмах с большим моментом инерции, содержащих многоступенчатые редукторы.
Цель изобретения - повышение производительности экскаватора путем оптимизации переходных процессов.
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - временные диаграммы, иллюстрирующие работу устройства при изменении положения командо- Ног троллера; на фиг. 3 - статические харак- | ернст 11 и ;;веньеп устройства.
Устройство включает в себя приводной Двигатель 1, управляемый преобразователь 2, регулятор 3 тока, регулятор 4 напряжения, первый 5 и второй б элементы ограничения, оптозлектронпый ключ 7, резисторы 81-13, вентильный мост 14, командоконтрол- лер 15, дифференцирующий элемент 6, блок 17 выделения модуля, одновибратор 18, допшгннтельнын ограничительный резистор 19 и дополнительный оптоэлектронный ключ 20.
Приводной двигатель I питается от преобразователя 2, управление которым осу- (цествляется с помощью регулятора 3 тока и регулятора 4 напряжения. Регулятор напряжения имеет первый элемент 5 ограничения выходного напряжения и второй элемент 6 ограничения, который подключен параллельно первому элементу ограничения через выход оптоэлектронногх) ключа 7 и последовательно соединенный с ним дополнительный регулируемый резистор 8. Параллельно элементу 5 ограничения подг лючец резистор 9. Последовательно соединенные первый, и второй резне горы iO и 11 образуют делитель напряжения задания. Выход делителя через резистор 12 подключен на вход регулятора 4 напряжения. Вход оптоэлектронного ключа 7 через ограничивающий резистор 13 подключен на выход вентильноQ го моста 14, вход которого подключен па- раллельпо регулируемому с-помон1ью коман- доконтроллера 15 первому резистору 10 делителя напряжения. Параллелыго второму резистору II делителя напряжения задаиия подключеи вход дифференцирующего звена
5 16, выход которого соедииен с входом звена выделения модуля 17, выход последнего сое- диг)ен с входом одновибратора 18, выход которого через дополнительный ограничительный резистор 19 подключен к входу дополнительного оптоэлектронного ключа 20. Выход
0 последнего подключен параллельно цепочке, состоящей из дополиительного регулируемого резистора 8 и подключенного к (гему последовательно выхода реверсивного оптоэлектронного ключа 7 в цепи второго элемента б ограничения выходного напряжения
5 регулятора 4 напряжения.
Устройство работает следующим образом.
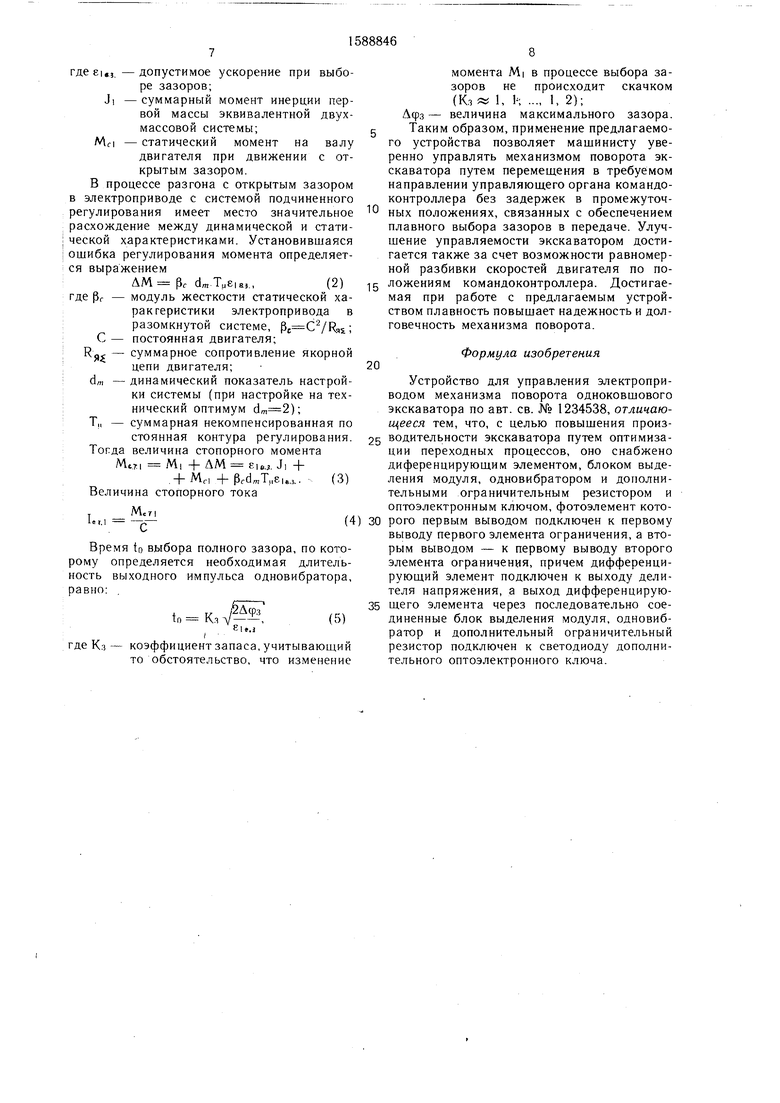
Если кома ндоконтроллер 15 резко переводится из нулевого положения в крайнее рабо0 чее, соответствующее, например, повороту экскаватора вправо, напряжение на втором резисторе 11 делителя напряжения задания скачкообразно изменяется до максимальной величины UsH (фиг. 2а). При этом Fia выходе дифференцирующего элемента 16 появляется
5 импульс напряжения U, (фиг. 26), а на выхо.де блока 17 выделения модуля - импульс нанряжения U«n (фиг. 2в). Импульс напряжения Ui n запускает одновибратор 18 и на его выходе образуется сигнал Uo (фиг. 2г) прямоугольной формы длитель0 ностью in, определяемой времязадающей цепью одновибратора 18. При появлении сигнала Uo открывается дополнительный онто- электронгшй ключ 20, выходом которого шунтируется выход оптоэлектронного ключа 7
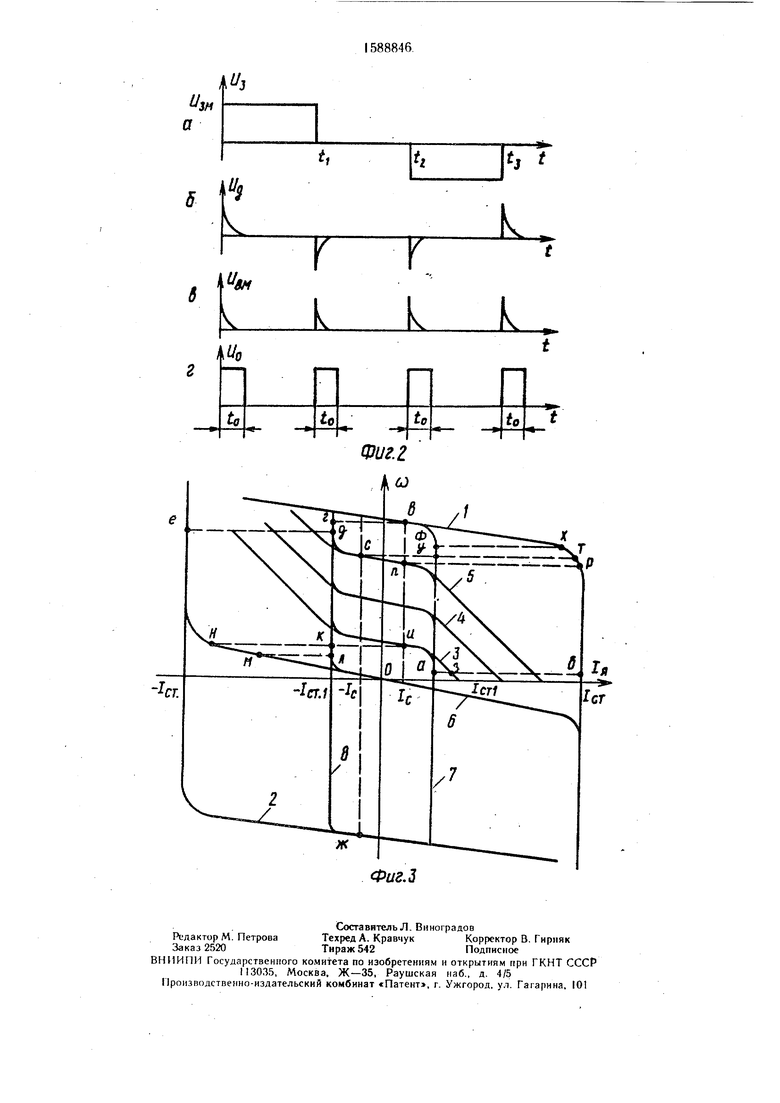
и включенный с ним последовательно регулируемый резистор 8 в цепи второго элемента б огра1Н1чения регулятора 4 напряжения. При этом обеспечивается минимальная величина задания регулятора 3 тока, определяемая величиной напряжения ограничения элемента 6 ограничения. Этому значению задания регулятора 3 тока соответствует статическая характеристика 7 электропривода со значением стопорного тока Км (фиг. 3). Длительность сигнала to выбирается такой, чтобы за это время успевали выбраться максимально возможные зазоры в передаче. Работа привода в начальный период пуска при наличии зазоров в передаче имеет три характерные стадии. В первой стадии, когда зазоры не выбраны ввиду малого момента инерции системы, приведенного к валу двигателя, имеется большое расхождение между динамической и статической характеристиками электропривода и разгон осуществляется с минимальным значением тока якоря двигателя. После выбора зазоров вследствие присоединения больших инерционных масс поворотной платформы, стрелы и ковша резко увеличивается момент инерции системы, уменьшается расхождение между динамической и статической характеристиками электропривода и ток якоря двигателя увеличивается, приближаясь к значению Ьц. На второй стадии с этим значением тока якоря происходит дальнейший разгон.
По истечении времени to оптоэлектрон- ный ключ 20 закрывается и ток якоря повышается до значения, определяемого величиной напряжения ограничения первого элемента 5 ограничения. Этой величине напряжения ограничения регулятора 4 напряжения соответствует статическая характеристика 1 электропривода (фиг. 3) со значением стопорного тока UT, при котором обеспечивается дальнейший разгон с максимально допустимым ускорением, что соответствует третьей стадии пуска.
Если при подаче команды на пуск зазоры в передаче выбраны, начальный период разгона характеризуется только двумя стадиями, определяемыми двумя значениями задания регулятору 3 тока в соответствии со значениями напряжений ограничения элементов 6 и 5 ограничения регулятора 4 напряжения. В этом случае после подачи команды на пуск двигатель разгоняется до скорости, определяемой точкой а на характеристике 7. По истечении времени to ток якоря двигателя повышается до значения UT (точка б на характеристике 1) и дальнейший разгон происходит в соответствии с характеристикой 1 до точки в установившегося, режима работы со статическим током.
Моменту времени ti (фиг. 2) соответствует подача команды на торможение привода путем резкой перестановки командо- контроллера в нулевое положение. При этом сигнал задания UJM скачком уменьшается до нуля (фиг. 2а). На выходе дифференцирующего элемента 16 появляется сигнал Ц, отрицательной полярности (фиг. 26), который блоком 17 выделения модуля инвертируется
0
5
в положительный сигнал Ugf, (фиг. 2в). Сигнал Ueif запускает одновибратор 18 и на его выходе образуется сигнал Uo той же длительности to, что и в начале пуска (фиг. 2г). Сигнал Uo открывает дополнительный опто- электронный ключ 20, выходом которого на время to устанавливается величина задания регулятора 3 тока, которому соответствует статическая характеристика 8 электропривода со значением стопорного тока -leri.
Таким образом, в начальной стадии торможения, при которой могут разрываться кинематическая цепь и образовываться максимальные зазоры в передаче, ток якоря двигателя ограничивается значением, обеспечивающим плавный выбор .зазоров. По истечении времени to дополнительный опто- электронный ключ 20 закрывается и ток якоря двигателя, определяемый напряжением элемента 5, повышается до значения, соответствующего статической характеристие 6 (фиг. 3). Таким образом, после плавного выбора зазоров торможение, как и пуск, протекает с максимально допустимым ускорением. Если предположить, что динамическая характеристика при торможении совпадает со статической, процесс торможения протекает по следующей траектории (фиг. 3). В начальной стадии торможения ток якоря двигателя от значения 1с (точка в характеристики 1) изменяется до значения -I.n (точка г характеристики 8). Под действием этого тока в течение времени to скорость двигателя понижается до значения, определяемого точкой д характеристики 8. По истечении времени to ток якоря повышается до значения -1ет (точка е характеристики 6), и в соответ5- ствии с этой характеристикой происходит эффективное торможение до нулевой скорости.
Аналогично работает устройство и при другом направлении вращения.
Наклон характеристик 3, 4 и 5 (фиг. 3), а следовательно, и требуемые значения токов якоря двигателя при переключениях на промежуточных положениях командокон- троллера устанавливаются путем изменения сопротивления резистора 8 в цепи второго
5 элемента 6 ограничения напряжения регулятора 4 напряжения. Как видно на фиг. 3, при равномерной разбивке стопорных токов по ступеням командоконтроллера максимальные значения токов переключения, соответствующие промежуточным характеристи0 кам 3, 4 и 5, меньше величины тока Ц, соответствующего основной рабочей характеристике 1. Это облегчает выполнение маневровых работ.
Величина стопорного тока In;i и длитель- ность to сигнала одновибратора определяет° ся следующим образом.
Момент двигателя в процессе выбора зазоров при разгоне двигателя должен составлять
0
М: Eia, JI+MCI
(1)
гдее:,,,-допустимое ускорение при выборе зазоров;
Ji - суммарный момент инерции первой массы эквивалентной двух- массовой системы;
Mfi - статический момент на валу двигателя при движении с открытым зазором.
В процессе разгона с открытым зазором в электроприводе с системой подчиненного регулирования имеет место значительное расхождение между динамической и статической характеристиками. Установившаяся ошибка регулирования момента определяется выражением
АМ р. dmT.eie,.,(2)
где РГ - модуль жесткости статической характеристики электропривода в разомкнутой системе, ,,j; С - постоянная двигателя; Rjii - суммарное сопротивление якорной
цепи двигателя;
dm - динамический показатель настройки системы (при настройке на технический оптимум ); Т,, - суммарная некомпенсированная по стоянная контура регулирования. Тогда величина стопорного момента Мс.п Ml + ДМ 8U.J. Ji +
,+ М„ 4-MmT,,8u.,. (3) Величина стопорного тока
10
15
20
момента Mi в процессе выбора зазоров не происходит скачком {К, 1, К ..., 1, 2);
Лфз - величина максимального зазора. Таким образом, применение предлагаемого устройства позволяет машинисту уверенно управлять механизмом поворота экскаватора путем перемещения в требуемом направлении управляющего органа командо- контроллера без задержек в промежуточных положениях, связанных с обеспечением плавного выбора зазоров в передаче. Улучшение управляемости экскаватором достигается также за счет возможности равномерной разбивки скоростей двигателя по положениям командоконтроллера. Достигаемая при работе с предлагаемым устройством плавность повышает надежность и долговечность механизма поворота.
Формула изобретения
25
,М.Г1
U,,,- Время to выбора полного зазора, по которому определяется необходимая длительность выходного импульса одновибратора, равно:
to Кз EI..J
(5)
где Кз
коэффициент запаса, учитывающий то обстоятельство, что изменение
Устройство для управления электроприводом механизма поворота одноковшового экскаватора по авт. св. № 1234538, отличающееся тем, что, с целью повышения производительности экскаватора путем оптимизации переходных процессов, оно снабжено диференцирующим элементом, блоком выделения модуля, одновибратором и дополнительными ограничительным резистором и оптоэлектронным ключом, фотоэлемент кото- (4) 30 рого первым выводом подключен к первому выводу первого элемента ограничения, а вторым выводом - к первому выводу второго элемента ограничения, причем дифференцирующий элемент подключен к выходу делителя напряжения, а выход дифференцирующего элемента через последовательно соединенные блок выделения модуля, одновиб- ратор и дополнительный ограничительный резистор подключен к светодиоду дополнительного оптоэлектронного ключа.
35
момента Mi в процессе выбора зазоров не происходит скачком {К, 1, К ..., 1, 2);
Лфз - величина максимального зазора. Таким образом, применение предлагаемого устройства позволяет машинисту уверенно управлять механизмом поворота экскаватора путем перемещения в требуемом направлении управляющего органа командо- контроллера без задержек в промежуточных положениях, связанных с обеспечением плавного выбора зазоров в передаче. Улучшение управляемости экскаватором достигается также за счет возможности равномерной разбивки скоростей двигателя по положениям командоконтроллера. Достигаемая при работе с предлагаемым устройством плавность повышает надежность и долговечность механизма поворота.
Формула изобретения
Фиг. г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1984 |
|
SU1234538A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| Устройство для управления электродвигателем механизма поворота карьерного экскаватора | 1986 |
|
SU1461839A1 |
| Устройство для ограничения тока в реверсивном электроприводе постоянного тока | 1985 |
|
SU1304160A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА КАРЬЕРНОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347038C2 |
| Электропривод механизма поворота одноковшового экскаватора | 1986 |
|
SU1432149A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1985 |
|
SU1283314A1 |
| Способ ограничения динамических усилий в механизме экскаватора и устройство для его осуществления | 1987 |
|
SU1490233A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
Изобретение относится к электроприводам постоянного тока, может быть использовано в механизмах поворота одноковшовых экскаваторов и кранов. Цель изобретения - повышение производительности экскаватора путем оптимизации переходных процессов. Устройство содержит приводной двигатель 1 и управляемый преобразователь 2, к входу которого подключены последовательно соединенные регулятор 3 тока и регулятор 4 напряжения. Параллельно регулятору 4 включены элементы 5 и 6 ограничения, подключаемые к регулятору 4 через оптоэлектронные ключи (ОК) 7 и 20. Параллельно второму резистору 11 делителя напряжения задания подключен вход дифференцирующего элемента (ДЭ) 16. Через последовательно соединенные блок 17 выделения модуля, одновибратор 18 и ограничительный резистор 19 к светодиоду ОК 20 подключен выход ДЭ 16. При появлении скачкообразного сигнала на выходе ДЭ 16 через блок 17 запустится одновибратор 18 и на его выходе сформируется сигнал прямоугольной формы, определяемый времязадающей цепью одновибратора 18. Длительность импульса одновибратора 18 выбирается такой, чтобы за это время успели выбраться максимально возможные зазоры в передаче. Импульс с одновибратора 18 поступает на ОК 20, которые воздействуют на регулятор 4. Это приводит к ограничению тока в преобразователе 2, а следовательно, и к снижению динамического момента при пуске двигателя 1. 3 ил.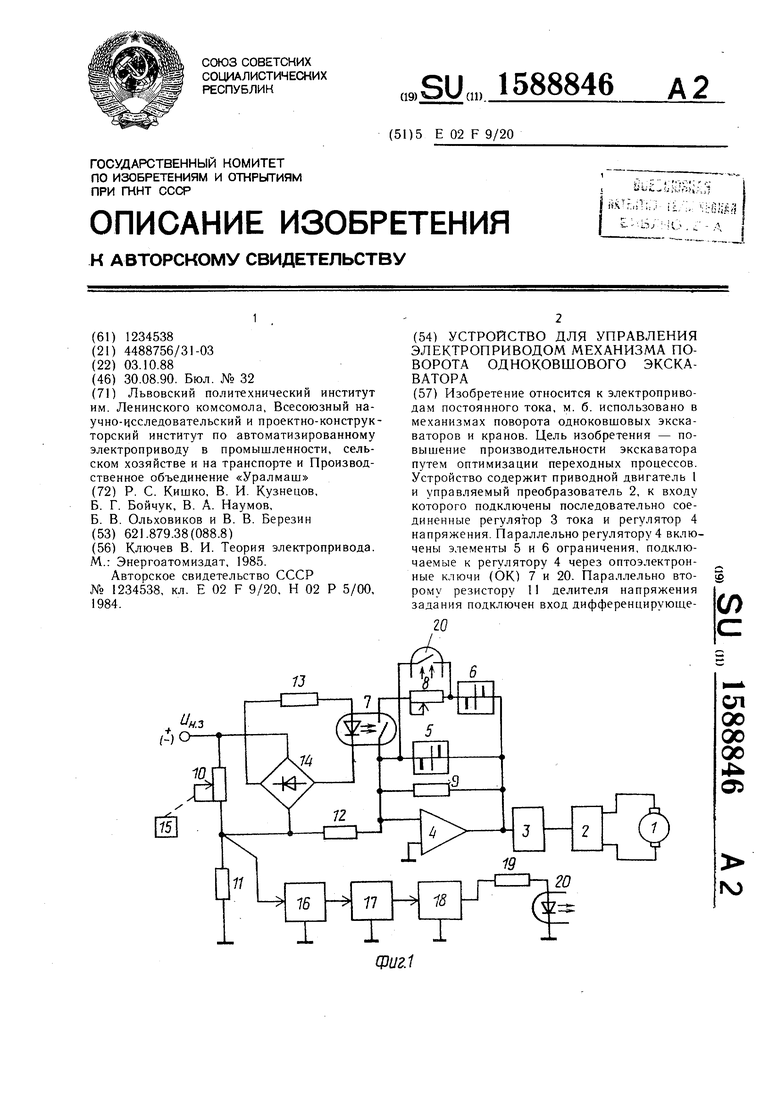
ж
Фиг.З
| Ключев В | |||
| И | |||
| Теория электропривода | |||
| М.: Энергоатомиздат, 1985 | |||
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1984 |
|
SU1234538A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
