128
рой выход ключа 9 соединен с входом регулятора 5. В режимах торможения выходные напряжения Д 6 и 7, а следовательно, компараторов 12 и 13 имеют одинаковую полярность. Напряжение на выходе ВМ 11 равно нулю. Шунтирования ТР 8 ключом 9 не происходит. Момент двигателя 1 пропорционален входному, напряжению регулятора 5. В режимах разгона знаки выходных напряжений Д 6 и 7 и соотв. компараторов 13 и 12 противоположны. Выходное
1
Изобретение относится к электро- приводу по системе преобразователь - двигатель постоянного тока и может быть использовано для управления механизмом поворота одноковшового зк- 5 скаватора, а также другими механизмами перемещения с реактивной нагрузкой, для которых характерны частые разгоны и торможения, например для механизмов поворота и поступатель- 0 ного перемещения кранов.
Цель Изобретения - иовышение производительности экскаватора путем уравнивания ускорений механизма поворота в периоды его разгона и тор- можения до значения, предельно допустимого по условиям механической прочности.
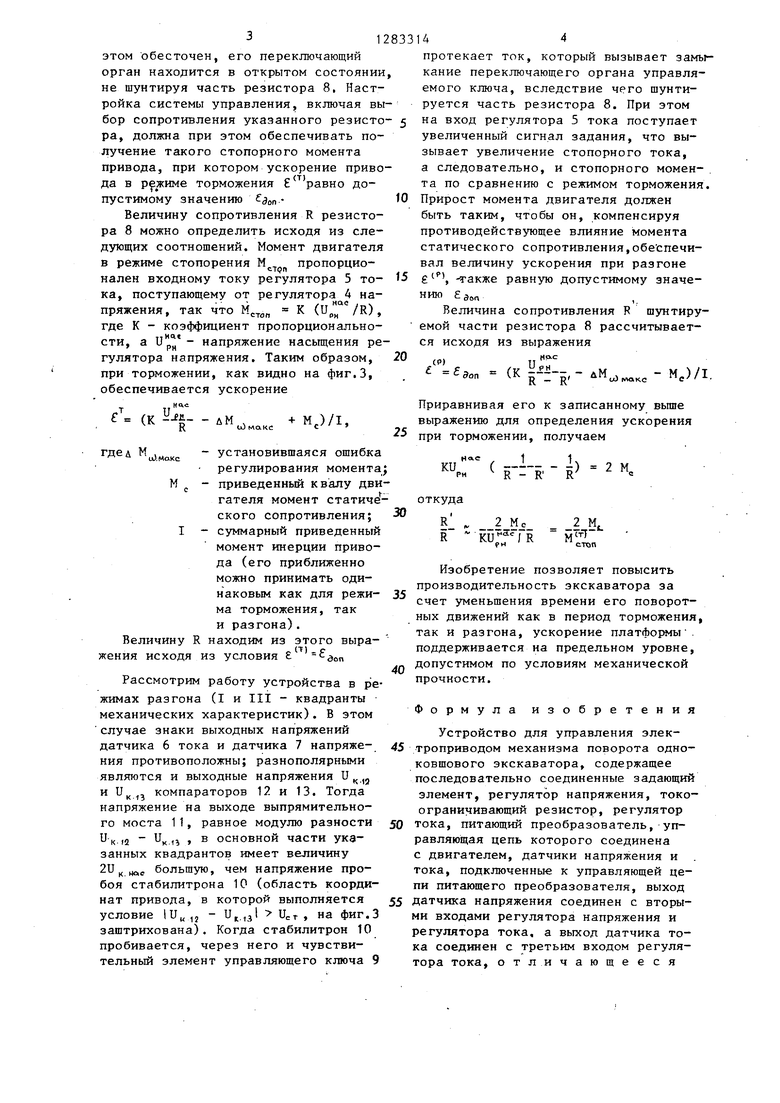
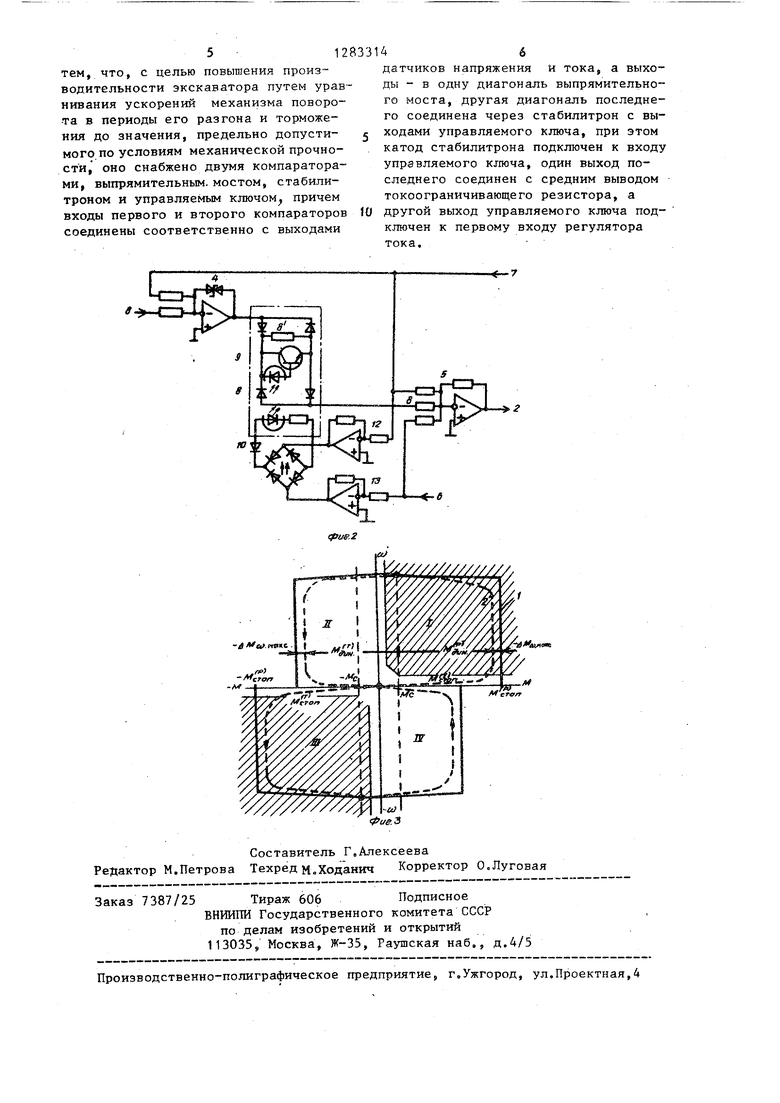
На фиг,1 изображена схема предлагаемого устройства управления; на 0 фиг.2 - вариант реализации его основных узлов; на фиг.З - статические и динамические характеристики привода в случае настройки статической характеристики с нулевой жесткостью участка ограничения момента.
Устройство содержит двигатель 1, подключенный в цепь питающего преобразователя 2, последовательно соединенные задающий элемент 3 и регу- - лятор 4 напряжения. Выход регулятора 5 тока соединен с входом питающего преобразователя 2,в управляющую цепь последнего подключены датчик 6 тока и датчик 7 напряжения. Выход датчи- 35 ка 7 напряжения соединен с вторыми входами регулятора 4 напряжения и регулятора 5 тока. Выход регулятора
25
4
напряжение БМ 11 больше напряжения пробоя стабилитрона 10. Пробой стабилитрона 10 вызывает замыкание ключа 9 и шунтирование ТР 8. При этом на вход регулятора 5 поступает увеличенный сигнал задания, что вызывает увеличение стопорного тока. Рассчитывая величину сопротивления шунти- - руемой части ТР 8, обеспечивают величину ускорения при торможении и разгоне, равную допустимому значению. 3 ил.
5 0
0
35
5
4 напряжения соединен с токоограни- чивающим резистором В, выход которого подключен к первому входу регулятора 5 тока. Устройство также содержит управляемый ключ 9, стабилитрон 10, выпрямительный мост 11 и два компаратора 12 и 13, при этом к входу компаратора 12 подключен датчик 7 напряжения, а к входу компаратора 13 - датчик 6 тока. .Выходы компараторов 12 и 13 соединены с одной диагональю выпрямительного моста 11, другая диагональ выпрямительного моста 11 через стабилитрон 10 подключена к входам управляемого ключа 9.При включении стабилитрона 10 в диагональ вьшрямительного моста 11 его катод необходимо подключить к одному входу управляемого ключа 9, один выход которого подключен к среднему выводу токоограничиваюшего резистора 8,а другой соединен с первым входом регулятора тока.
Устройство работает следующим образом.
В режимах торможения привода,когда он работает во II или IV квадрантах механических характеристик в соответствии с принятыми настройками, выходные напряжения датчика 6 тока и датчика 7 напряжения совпадают по знаку. Одинаковую полярность имеют тогда и выходные напряжения компараторов 12 и 13, а так как в рассматриваемом случае они равным по модулю, то напряжение на входе выпрямительного моста 11 равно нулю.Чувствительный элемент управляемого ключа 9 при
этом обесточен, его переключающий орган находится в открытом состоянии не шунтируя часть резистора 8, Настройка системы управления, включая выбор сопротивления указанного резисто ра, должна при этом обеспечивать получение такого стопорного момента привода, при котором ускорение привода в режиме торможения равно допустимому значению fаоп
Величину сопротивления R резистора 8 можно определить исходя из следующих соотношений. Момент двигателя в режиме стопорения М пропорцио
налей входному току регулятора 5 то- ка, поступающему от регулятора 4 напряжения, так что он f где К - коэффициент пропорциональности, а Up - напряжение насьщения регулятора напряжения. Таким образом, при торможении, как видно на фиг,3, обеспечивается ускорение
К-хо
лМ
(л) макс
+ М,)/1,
установившаяся ошибка регулирования момента приведенный к валу двигателя момент статиче ского сопротивления; I - суммарный приведенный момент инерции привода (его приближенно можно принимать одинаковым как для режима торможения, так и разгона). Величину R находим из этого выраения исходя из условия
(f).
-don
Рассмотрим работу устройства в режимах разгона (I и III - квадранты механических характеристик), В этом случае знаки выходных напряжений датчика 6 тока и датчика 7 напряжения противоположны; разнополярными являются и выходные напряжения U и и„, компараторов 12 и 13, Тогда
К 1 Э
напряжение на выходе выпрямительного моста 11, равное модулю разности
и-к. ,2 - и,
K.ii
В ОСНОВНОЙ части указанных квадрантов имеет величину 2Uк нас большую, чем напряжение пробоя стабилитрона 10 (область координат привода, в которой выполняется условие IU,j - и.,з1 UCT , на фиг,3 заштрихована), Когда стабилитрон 10 пробивается, через него и чувстви- тельньлй элемент управляющего ключа 9
533144
протекает ток, который вызывает замыкание переключающего органа управляемого ключа, вследствие чего шунтируется часть резистора 8. При этом на вход регулятора 5 тока поступает увеличенный сигнал задания, что вызывает увеличение стопорного тока, а следовательно, и стопорного момента по сравнению с режимом торможения. Прирост момента двигателя должен быть таким, чтобы он, компенсируя противодействующее влияние момента статическо го сопротивления, обе спечи- вал величину ускорения при разгоне
10
g
, -также равную допустимому значению э„„
Величина сопротивления R шунтируемой части резистора 8 рассчитывается исходя из выражения
СР)
Son
нос
UPH
(К -1-,- лм,- м,)/1.
5
Приравнивая его к записанному вьш1е вьфажению для определения ускорения при торможении, получаем
1
ки
(
R - R
b
2 М.
0
откуда Rl.
R 2 Мс
Hjc ,-j
ри
2 М
стоп
Изобретение позволяет повысить производительность экскаватора за счет уменьшения времени его поворотных движений как в период торможения, так и разгона, ускорение платформы , поддерживается на предельном уровне, допустимом по условиям механической прочности.
Формула изобретения
Устройство для управления электроприводом механизма поворота одноковшового экскаватора, содержащее последовательно соединенные задающий элемент, регулятор напряжения, токо- ограничивающий резистор, регулятор тока, питающий преобразователь, управляющая цепь которого соединена с двигателем, датчики напряжения и тока, подключенные к управляющей цепи питающего преобразователя, выход датчика напряжения соединен с вторыми входами регулятора напряжения и регулятора тока, а выход датчика тока соединен с третьим входом регулятора тока, отличающееся
5 12В331
тем, что, с целью повышения производительности экскаватора путем уравнивания ускорений механизма поворота в периоды его разгона и торможения до значения, предельно допусти- 5 мого по условиям механической прочности, оно снабжено двумя компаратора- ми, выпрямительным, мостом, стабилитроном и управляемым ключом причем входы первого и второго компараторов 10 соединены соответственно с выходами
46
датчиков напряжения
и тока, а выходы - в одну диагональ выпрямительного моста, другая диагональ последнего соединена через стабилитрон с выходами управляемого ключа, при этом катод стабилитрона подключен к входу управляемого ключа, один выход последнего соединен с средним выводом токоограничивающего резистора, а другой выход управляемого ключа подключен к первому входу регулятора тока.
Составитель Г.Алексеева Редактор М.Петрова Техред Мл,Ходанич Корректор 0.Луговая
Заказ 7387/25 Тираж 606 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4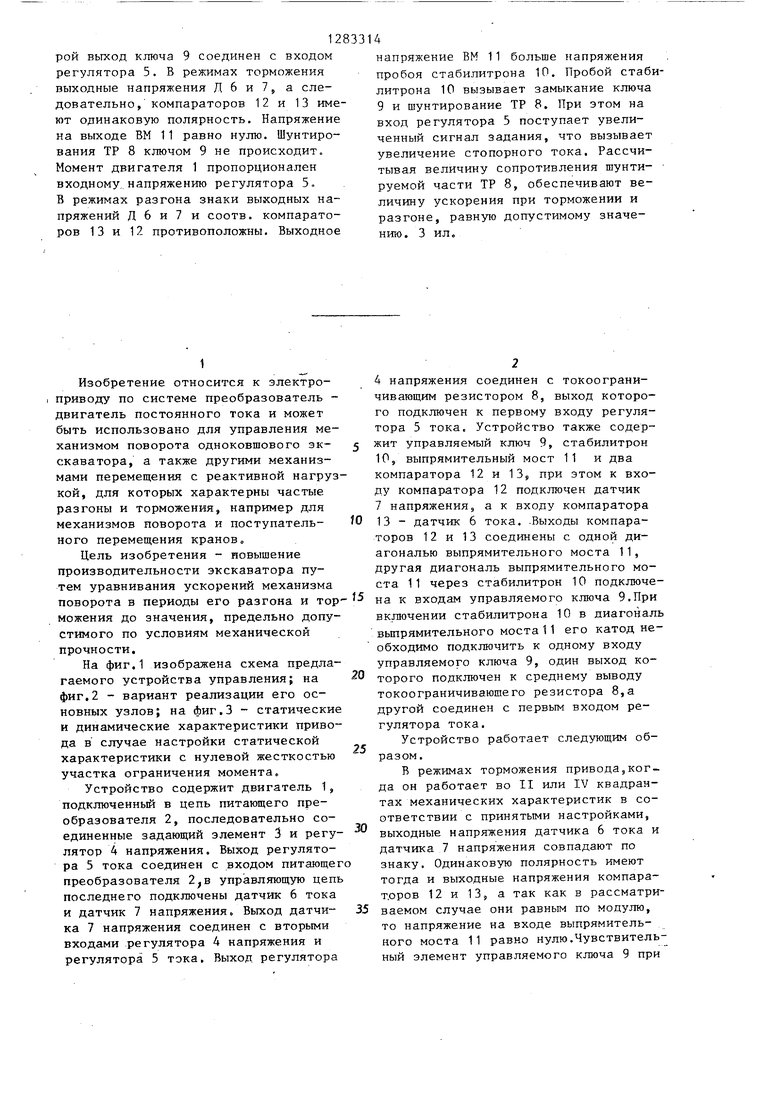
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод механизма поворота одноковшового экскаватора | 1986 |
|
SU1432149A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1984 |
|
SU1234538A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1988 |
|
SU1588846A2 |
| Устройство для управления торможением асинхронного короткозамкнутого двигателя | 1976 |
|
SU657560A1 |
| Электропривод переменного тока | 1981 |
|
SU955477A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Привод центрифуги | 1987 |
|
SU1505789A1 |
| Способ управления электроприводами одноковшового экскаватора | 1985 |
|
SU1294933A1 |
| Электропривод постоянного тока | 1986 |
|
SU1317626A1 |
Изобретение относится к электроприводу по системе генератор - двигатель и позволяет повысить производительность экскаватора путем уравнивания ускорений механизма поворота в периоды его разгона и торможения до значения, предельно допустимого по условиям механической прочности. Для этого устройство снабжено подключенными к датчикам (Д) напряжения 7 и тока 6 компараторами 12 и 13,которые соединены с одной диагональю выпрямительного моста (ВМ) 11. Вторая диаго- § наль ВМ 11 через стабилитрон 10 подключена к входам управляемого ключа 9. Один выход ключа 9 подключен к среднему выводу токоограничивающего резистора (ТР) 8, соединяющего связанный с задающим элементом 3 регулятор 4 напряжения и регулятор 5 тока, связанный с преобразователем 2. Вто(Л
| Волков Д.П | |||
| и др | |||
| Динамика электромеханических систем экскаваторов | |||
| М.: Машиностроение, 1971, с.357 | |||
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1984 |
|
SU1234538A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ключев В.И | |||
| Ограничение динамических нагрузок электропривода | |||
| М.: Энергия, 1971, с.144-151. | |||
