12
Изобретение относится к электроприводам по системе управляемый преоб разователь -двигатель постоянного тока с системой подчиненнЪго регулирования и может быть использовано в электроприводах механизмов поворота одноковшовых экскаваторов а также в механизмах поворота и поступательного перемещения кранов и им подобных механизмов с большим моментом инер- ции, имеющих в своем составе многоступенчатые редукторы. .
Цель изобретения - повышение надежности и упрощение управления электроприводом,
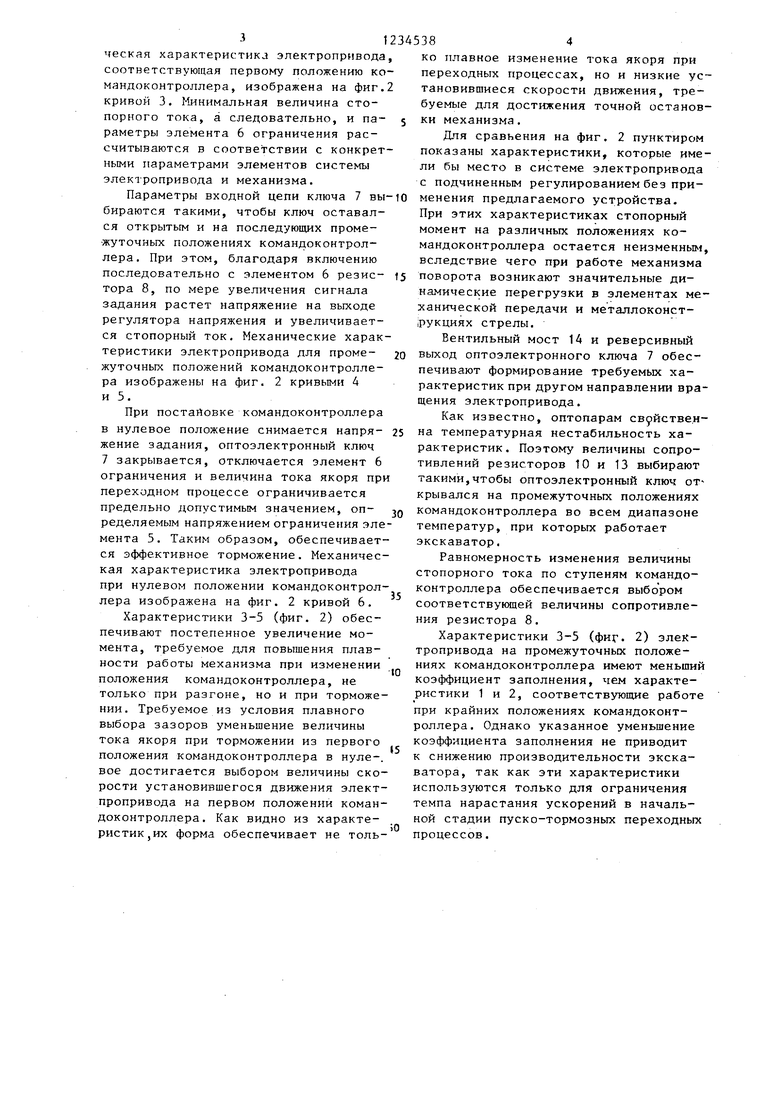
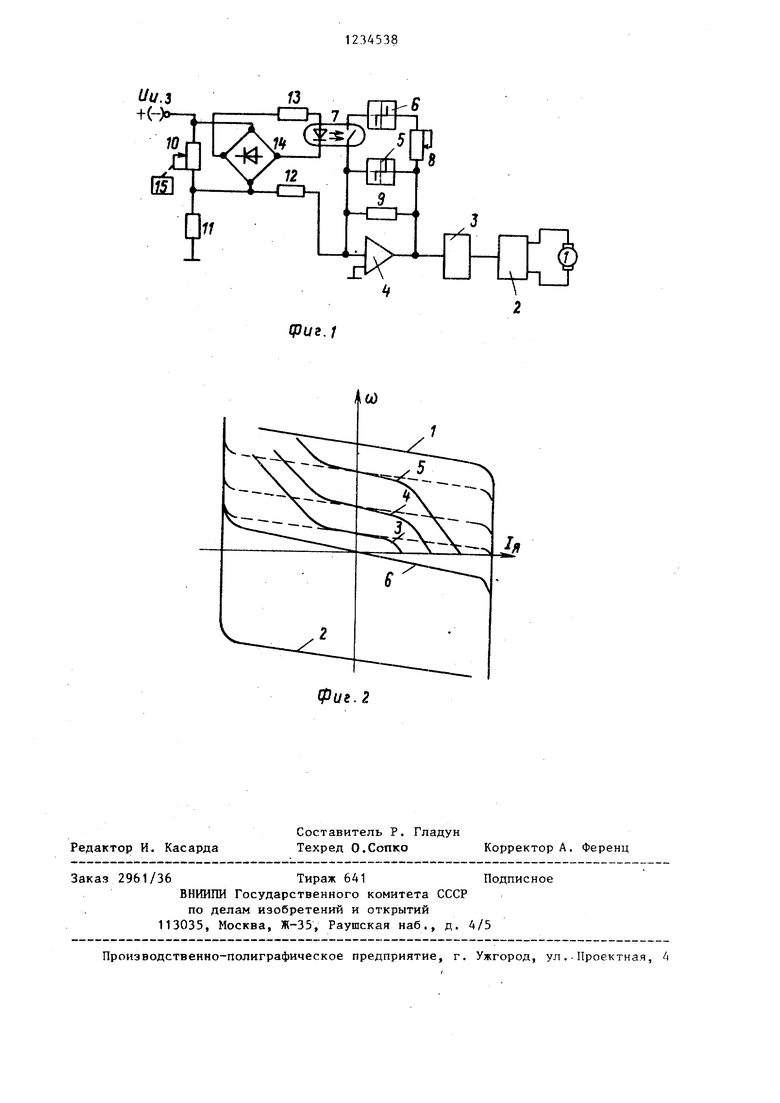
На фиг. 1 изображена принципиальная схема устройства; на фиг. 2 - ста- тические механические характеристики электропривода с предлагаемым устройством.
Устройство включает приводной двигатель 1, управляемый преобразователь 2, регулятор 3 тока, регулятор 4 напряжения, первьш элемент 5 ограничения, второй элемент 6 ограничения, оптоэлектронный ключ 7, резисторы 8- 13, вентильный мост 14 и командоконт- роллер 15.
Приводной двигатель 1 питается от преобразователя 2, управление которым осуществляется с помощью регулятора 3 тока и регулятора 4 напряжения. Регулятор напряжения имеет первый элемент 3 ограничения выходного напряжения и второй элемент 6 ограничения, который подключен параллельно первому элементу ограничения через выход оптоэлектронного ключа 7 и последовательно соединенный с ним резистор 8. Параллельно элементу 5 ограничения подключен резистор 9. Последовательно соединенные резисторы 10 и 11 образуют делитель напряжения задания. Вход делителя соединен с источником напряжения задания, а на его выход через резистор 12 подключен вход регулятора 4 напряжения. Вход оптоэлектронного ключа 7 через ограничивающий резистор 13 подключен на выход вентильного моста 14, вход которого подключен параллельно регули- руемому с помощью командоконтроллера 15 резистору 10.
В качестве управляемого преобразователя используются, например, тирис- торный преобразователь, генератор по- стоянного тока с тиристорным или иным возбудителем и т.п. Регуляторы 3 и 4 реализуются с помощью полупроводиико
Q
о
5
5
д
5
5
382
Бых операционных усилителей, п том числе выполненных на инт : гральньгх микросхемах и др. Элементы ограничения выполнены с помощью кремниевых стабилитронов, стабисторов, набора полупроводниковых вентилей, источников напряжения в сочетании с вентилями и др. Оптоэлектронный ключ реализуется на базе диодных, тиристорных и транзисторных оптопар в сочетании с транзисторами, диодами и другими элементами или без них.
Устройство работает следующим образом. I
С помощью контактов командоконтроллера или реле или контактора направления вращения на вход регулятора 4 напряжения подается напряжение задания определенной полярности. Полярности напряжения источника задания Uj (фиг. 1, без скобок) соответствует, например, поворот экскаватора вправо, обратной полярности - влево. Для обеспечения максимальной скорости вращения двигателя 1 командоконт- роллером t5 устанавливается минимальное значение споротивления резистора 10. При этом падение.напряжения на резисторе 10 недостаточно для открывания оптоэлектронного ключа 7. Величина стопорного тока электропривода определяется напряжением ограничения первого элемента 5 ограничения регулятора 4 напряжения. Если регулятор тока выполнен пропорционально-интегральным, реализованным, например, с помощью критической положительной обратной связи по напряжению двигателя, заведенной на регулятор тока, механические характеристики электропривода имеют форму кривых 1 и 2 (фиг. 2). Вертикальный участок этих характеристик обеспечивает движение с примерно постоянным значением ускорения или замедления, чем достигается сокращение времени пуско-тормозных переход- ньк процессов и повышение производительности экскаватора.
При минимальном задании регулятора напряжения, соответств тощем первому положению командоконтроллера, величина сопротивления резистора 10 и напряжение на нем максимальны, вследствие чего открывается ключ 7,кото- |рым подключается второй элемент 6 ограничения с малой величиной напряжения ограничения .При этом стопорный ток электропривода уменьшается. Мехаиическая характеристика электропривода соответствующая первому положению ко- мандоконтроллера, изображена на фиг.2 кривой 3. Минимальная величина стопорного тока, а следовательно, и па- раметры элемента 6 ограничения рассчитываются в соответствии с конкретными параметрами элементов системы электропривода и механизма.
Параметры входной цепи ключа 7 выбираются такими, чтобы ключ оставался открытым и на последующих промежуточных положеР1иях командоконтрол- лера. При этом, благодаря включению последовательно с элементом 6 резис- тора 8, по мере увеличения сигнала задания растет напряжение на выходе регулятора напряжения и увеличивается стопорный ток. Механические характеристики электропривода для проме- жуточных положений командоконтролле- ра изображены на фиг. 2 кривыми 4 и 5.
При постановке командоконтроллера
в нулевое положение снимается напря- жение задания, оптоэлектронный ключ 7 закрывается, отключается элемент 6 ограничения и величина тока якоря при переходном процессе ограничивается предельно допустимым значением, оп- ределяемым напряжением ограничения элемента 5. Таким образом, обеспечивается эффективное торможение. Механическая характеристика электропривода при нулевом положении командоконтроллера изображена на фиг. 2 кривой 6.
Характеристики 3-5 (фиг. 2) обеспечивают постепенное увеличение момента, требуемое для повышения плавности работы механизма при изменении положения командоконтроллера, не только при разгоне, но и при торможении. Требуемое из условия плавного выбора зазоров уменьшение величины тока якоря при торможении из первого положения командоконтроллера в нуле-. вое достигается выбором величины скорости установившегося движения элект- пропривода на первом положении командоконтроллера. Как видно из характе
ристик,их форма обеспечивает не толь5
tO 13 0
5 Q 5
o
5
O
ко плавное изменение тока якоря при переходных процессах, но и низкие установившиеся скорости движения, требуемые для достижения точной остановки механизма.
Для сравнения на фиг. 2 пунктиром показаны характеристики, которые имели бы место в системе электропривода с подчиненным регулированием без применения предлагаемого устройства. При этих характеристиках стопорный момент на различных положениях командоконтроллера остается неизменным, вследствие чего при работе механизма поворота возникают значительные динамические перегрузки в элементах механической передачи и металлоконст- |рукциях стрелы.
Вентильный мост 14 и реверсивный выход оптоэлектронного ключа 7 обеспечивают формирование требуемьк характеристик при другом направлении вращения электропривода.
Как известно, оптопарам свуйстве.н- на температурная нестабильность характеристик. Поэтому величины сопротивлений резисторов 10 и 13 выбирают такими,чтобы оптоэлектронный ключ оТ крывался на промежуточных положениях командоконтроллера во всем диапазоне температур, при которых работает экскаватор.
Равномерность изменения величины стопорного тока по ступеням командоконтроллера обеспечивается выбором соответствующей величины сопротивления резистора 8.
Характеристики 3-5 (фиг. 2) электропривода на промежуточных положениях командоконтроллера имеют меньший коэффициент заполнения, чем характеристики 1 и 2, соответствующие работе при крайних положениях командоконтроллера. Однако указанное уменьшение коэффициента заполнения не приводит к снижению производительности экскаватора, так как эти характеристики используются только для ограничения темпа нарастания ускорений в начальной стадии пуско-тормозных переходных процессов.
ipus.j
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электродвигателем механизма поворота карьерного экскаватора | 1986 |
|
SU1461839A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1988 |
|
SU1588846A2 |
| Устройство для ограничения тока в реверсивном электроприводе постоянного тока | 1985 |
|
SU1304160A2 |
| Электропривод механизма поворота одноковшового экскаватора | 1986 |
|
SU1432149A1 |
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1984 |
|
SU1227773A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2107778C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА КАРЬЕРНОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347038C2 |
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1980 |
|
SU1048066A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1985 |
|
SU1283314A1 |
| Электропривод постоянного тока | 1985 |
|
SU1354378A1 |

Фиг. 2
Редактор И. Касарда
Составитель Р. Гладун Техред О.Сопко
Заказ 2961/36Тираж 641Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А. Ференц
| Патент США № 3518444,кл.290-14, опублик | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| 0 |
|
SU184955A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ключев В.И | |||
| и др | |||
| Электропривод и автоматизация общепромьштенньгх механизмов | |||
| М.: Энергия, 1980, с | |||
| Способ получения суррогата олифы | 1922 |
|
SU164A1 |
| Приспособление к аэроплану для опрыскивания растений | 1922 |
|
SU2300A1 |
| Схема электропривода механизма поворота, 1982. | |||
