Оптоэлектронныи ключ ФигЛ
4
СО
1чЭ
СО
; Изобретение относится к электроприводу. 1по системе преобразователь - двигатель |постоянного тока и может быть использо- 1вано для управления механизмом поворота |одноковшового экскаватора, а также дру- гими механизмами перемещения с реактивной нагрузкой, для которых характерны частые разгоны и торможения, например для механизмов поворота и поступательного перемещения кранов.
.Цель изобретения - упрощение и повы- щение надежности.
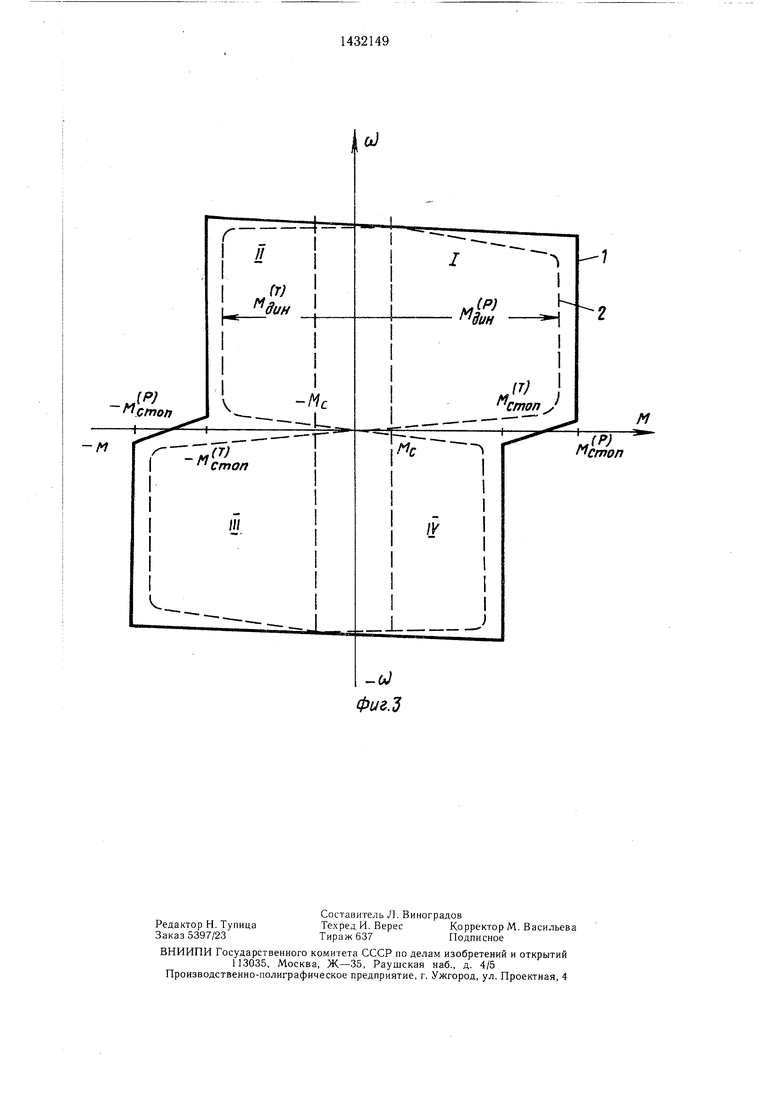
На фиг. I изображена схема электропривода; на фиг. 2 - основные узлы электропривода; на фиг. 3 - статические и динамические характеристики привода в случае I настройки статической характеристики с ну- I левой жесткостью участка ограничения мо- I мента.
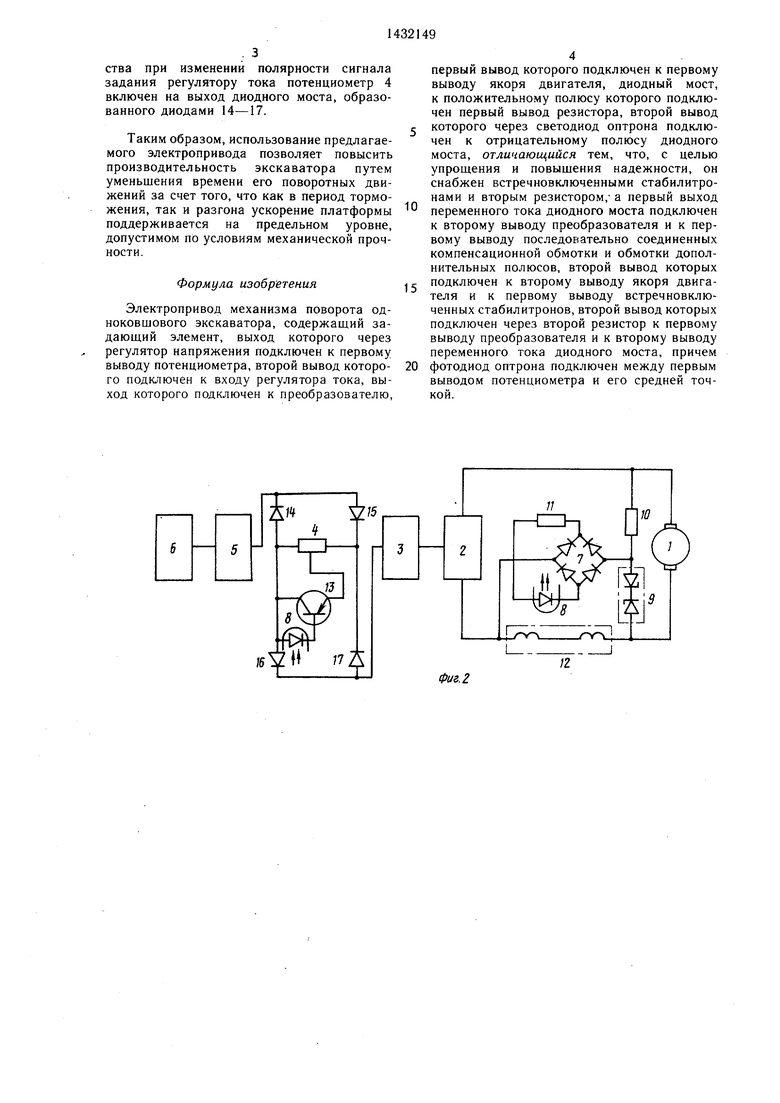
i Электропривод механизма поворота одно- I ковшового экскаватора состоит из двигателя 1, подключенного к преобразователю 2, регу- лятора 3 тока, к входу которого подключен { потенциометр 4, соединенный с регулятором I 5 напряжения, к входу которого подключен I задающий элемент 6, диодного моста 7, к I выходу которого светодиод оптрона 8, фото- элемент которого подключен к потенцио- i метру 4, встречновключенных стабилитронов : 9 с последовательно соединенным вторым ре- i зистором 10, резистора 11, последовательно 1 включенного со светодиодом оптрона 8, обмоток дополнительных полюсов и компенсационных обмоток 12.
Электропривод (фиг. 2) может содержать также транзистор 13 и выпрямительный мост, состоящий из диодов 14-17.
Полярность напряжений, снимаемых с обмоток дополнительных полюсов и компенсационных обмоток 12 и двух встречно-последовательно соединенных стабилитронов 9, такова, что в режимах разгона, т.е. при работе привода в 1 и 111 квадрат- тах его механических характеристик (фиг. 3), они являются согласованными.
Напряжение пробоя стабилитронов 9 выбирается примерно равным падению напряжения на обмотках дополнительных полюсов и компенсационных обмотках 12 электрических машин в стопорном режиме. Электропривод функционирует следующим образом.
В режимах торможения привода, когда он работает во 11 или 1У квадранте механических характеристик (фиг. 3), в соответствии с принятыми настройками напряжение идп.ко, снимаемое с обмоток дополнительных полюсов и компенсационных обмо.- ток 12 электрических мащин, и напряжение UCT, снимаемое с двух встречно-последовательно соединенных стабилитронов 9, противоположны по знаку и примерно равны. Следовательно, напряжение на входе диодного моста 7 мало. Величина тока во входной цепи оптрона 8 при этом недостаточна для его срабатывания и выход оптрона 8 не щунтирует части потенциометра 4. Настройка системы управления, включая выбор сопротивления потенциометра 4, должна при этом обеспечивать получение такого стопорного момента привода Метоп, при котором ускорение привода в режимах торможения е равно допустимому значению едоп.
В случае работы устройства в режи0 мах разгона (1 и 111 квадранты механических характеристик) напряжения идп.ко и UCT совпадают по знаку. Следовательно, на вход диодного моста 7 подается напряжение, равное сумме этих двух напряжег НИИ ивх Удп.ко-1-17ст. Это приводит к тому, что через вход оптрона 8 протекает ток, который вызывает его срабатывание, вследствие чего его выходом шунтируется часть потенциометра 4. При этом на вход регулятора 3 тока поступает увеличенный сигнал
0 задания, что вызывает повышение стопорного тока, а следовательно, и стопорного момента Метоп по сравнению с режимом торможения. Прирост момента двигателя должен быть таким, чтобы он, компенсируя противодействующее влияние момента статического сопротивления, обеспечивал величину ускорения при разгоне s , также равную допустимому значению едоп.
Переход из тормозного режима работы привода в двигательный (фиг. 3) изобраQ жен наклонным участком изменения момента от величины Метоп до Метоп при скорости двигателя, близкой к нулю. Этот участок обусловлен работой выходного элемента оптрона 8 в активном режиме. Параметры элементов схемы могут быть выбрань такими,
г при которых происходит скачкообразное изменение момента от величины Метоп до Метоп при нулевой скорости.
Ввиду того, что оптопарам свойственна возможность работы при широком диапазоне изменения входного тока, выбором величины
0 сопротивления резистора 11 обеспечивается надежное срабатывание оптрона 8 и правильное функционирование устройства с учетом нагрева обмоток дополнительных полюсов и компенсационных обмоток 12, технологис ческого разброса параметров элементов устройства, а также с учетом изменения предельных величин динамических моментов Мдии и Мдин (фиг. 3), вызванных разной степенью расхождения между динамическими и статическими характеристиками
0 привода при изменении нагрузки механизма. Оптрон 8, выход которого (фиг. 1) условно изображен в виде контакта реле, может быть выполнен бесконтактным с использованием оптопар и транзисторов. Один из возможных вариантов его реали5 зации приведен на фиг. 2. Входной элемент ключа реализован на оптроне 8. Выходным элементом служит транзистор 13. Для возможности функционирования устройства при изменении полярности сигнала задания регулятору тока потенциометр 4 включен на выход диодного моста, образованного диодами 14-17.
Таким образом, использование предлагаемого электропривода позволяет повысить производительность экскаватора путем уменьшения времени его поворотных движений за счет того, что как в период торможения, так и разгона ускорение платформы поддерживается на предельном уровне, допустимом по условиям механической прочности.
Формула изобретения
Электропривод механизма поворота одноковшового экскаватора, содержаш,ий за- даюш,ий элемент, выход которого через регулятор напряжения подключен к первому выводу потенциометра, второй вывод которого подключен к входу регулятора тока, выход которого подключен к преобразователю.
0
первый вывод которого подключен к первому выводу якоря двигателя, диодный мост, к положительному полюсу которого подключен первый вывод резистора, второй вывод которого через светодиод оптрона подключен к отрицательному полюсу диодного моста, отличающийся тем, что, с целью упрошения и повышения надежности, он снабжен встречновключенными стабилитронами и вторым резистором, а первый выход переменного тока диодного моста подключен к второму выводу преобразователя и к первому выводу последовательно соединенных компенсационной обмотки и обмотки дополнительных полюсов, второй вывод которых подключен к второму выводу якоря двигателя и к первому выводу встречновклю- ченных стабилитронов, второй вывод которых подключен через второй резистор к первому выводу преобразователя и к второму выводу переменного тока диодного моста, причем 0 фотодиод оптрона подключен между первым выводом потенциометра и его средней точкой.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1984 |
|
SU1227773A1 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1985 |
|
SU1283314A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1975 |
|
SU670695A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1988 |
|
SU1588846A2 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1984 |
|
SU1234538A1 |
| Устройство для ограничения тока нагрузки экскаваторного электропривода постоянного тока | 1980 |
|
SU1048066A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ СИСТЕМЫ ГЕНЕРАТОР-ДВИГАТЕЛЬ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1995 |
|
RU2096563C1 |
| Способ управления электроприводами одноковшового экскаватора | 1985 |
|
SU1294933A1 |
Изобретение относится к электроприводу механизма поворота одноковшового экскаватора. Цель изобретения - упро- шение устройства и повышение его надежности. Электропривод состоит из двигателя (Д) 1 с преобразователем 2. К входу преобразователя 2 подключен регулятор тока (РТ) 3 с потенциометром (П) 4. Параллельно якорю Д подсоединены встречновключенные стабилитроны 9 с резистором 10 к дополнительным полюсам Д 1 и стабилитронам 9 подключен диодный мост 7, а к его выходу - светодиод оптрона 8. Фотодиод оптрона 8 подключен к П 4. При разгоне электропривода с выхода диодного моста 7 подается напряжение, равное падению напряжения на дополнительных полюсах Д 1 и падению напряжения на стабилитронах 9. В результате оптрон 8 закорачивает часть П 4. На РТ 3 поступает увеличенный сигнал, что вызывает повышение стопорного тока. 3 ил. СЛ
Фиг. 2
| Волков Д | |||
| П | |||
| и др | |||
| Динамика электромеханических систем экскаваторов.-М.: Машиностроение, 1971, с | |||
| Дальномер | 1922 |
|
SU379A1 |
| Устройство для управления электроприводом механизма поворота одноковшового экскаватора | 1985 |
|
SU1283314A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
