Изобретение относится к управлению электрическими машинами и может быть использовано в дискретном эле- ктроприводе, в частности многокоординатном.
Цель изобретения состоит в повышении точности измерения положения ротора без специальных датчиков.
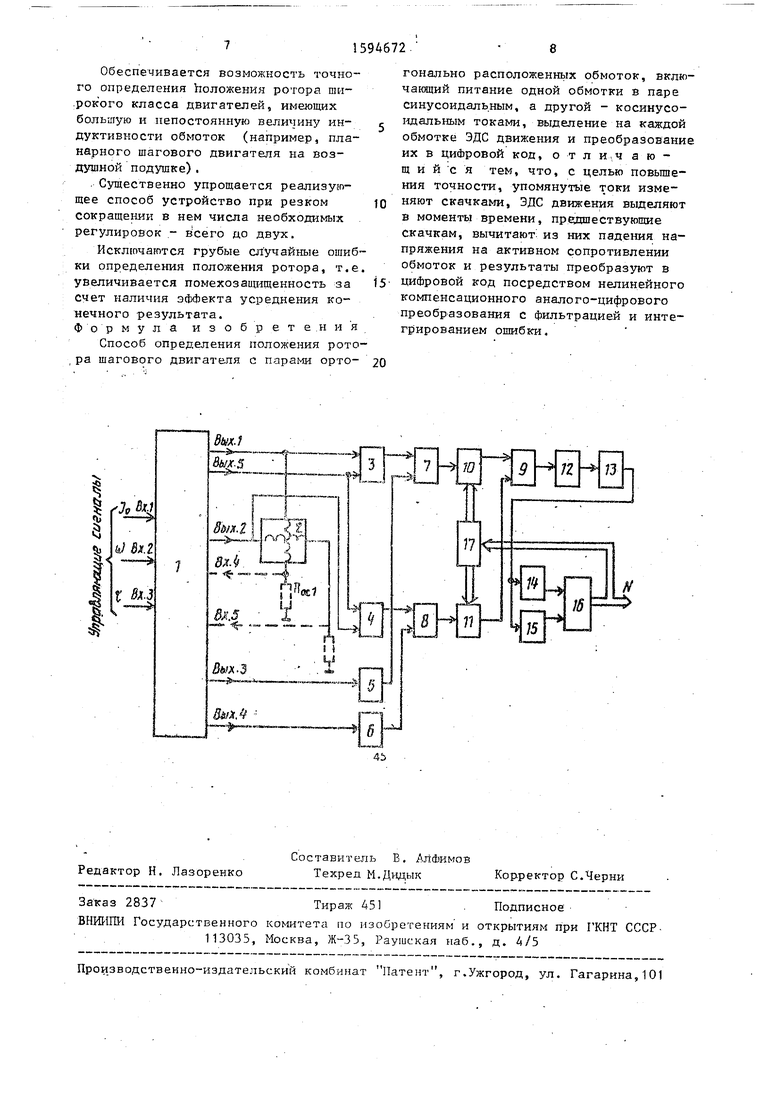
На чертеже приведена функциональная схема устройства для реализации способа.
Сущность способа заключается в следующем.
На каждой обмотке двигателя суммарное напряжение при запитке от источника тока равно
UK 1к() R,L,%li. EJt)
dt
(О
-где E(t) - ЭДС движения в фазе К
(К 1 или 2).
Для того, чтобы выделить из суммарного напряжения на обмотке U, сигнал ЭДС движения E(t), необходимо устранить две составлянлцие от сигнала запитки обмотки: падение напряжения на активном сопротивлении обмотки lK(t)-RA и ЭДС самоиндукции
dlK(t)
L --т-- . В известных способах устранение обеих составляющих пронзвосд
;о
4
О)
го
дится методом компенсации. Для этого формируются напряжения, равные по величине и противоположные по знаку указанным составляющим. Если член Ij,(t)-R., компенсируется дос гаточно точно, так как значение R само по себе мало и мало изменяется, то точ dlK(t) |ная компенсация члена
крайне затруднительна из-за большой вели- |чины индуктивности обмотки двигат(2ля и ее сильной зависимости от воздушного зазора между ротором-И статором двигателя, а также от уровня и часто- 1ТЫ в обмотке.
В данном способе синусн.о-коси1гус- ные токи в обмотках двигателя I(t) делают ступенчато-измеияюишмися. Тог dl.(t)
да член L
в момент скачка
1 dt
принимает некоторое максимальное значение, а затем экспоненциально уменьшается до нуля, максимально приближаясь к нему перед очередн1 П -5 скач- ком тока. Поэтому напряжения на обмотках двигателя измеряют в моменты перед скачком тока и запоминают их до следующего аналогичного момента. Этим обеспечивается исключение члена
L из суммарного сигнала с о k dt
.моток определяемого выражения (1). Затем обычным методом компенсиругпт в полученных сигналах член I (t)- R и выделяют тем caiviBiM искомые сигналы ЭДС E(t).
Для аналого-цифровой обработки таких ступенчатых синусно-косинусных сигналов используют операцию компен- сационного следящего :аналого цифро- вого преобразования с Фильтрапией.высокочастотной составляющей и интегрированием сигнала ошибки. Таким путем можно обрабатывать ступенчатые вход- ные синусно-косинусные сигналы и |тем самым реализовать высокую точ. s-iocTb предлагаемого выделения сигналов ЭДС и в конечном счете достичь увеличения точности всей цепи пере- мещение ротора - аналоговые сигналы ЭДС - цифровой код. Согласно этому методу один из сигналов ЭДС Е . . Е - f(t)sinu((t) умножают Hacos/i(
а другой сигнал Еа Е -f (t)cos.)/(t) на sin|tt,(u), где f(t) - ступенчатая ,фyнkцIiя , - амплитуда сигналов ЭД c (t) - положение подвижной части дгателя в функции времени, /i(u)
0
0
25 :,Q
5
Q 5
,
55
дискретный аргумент, формируемый по выходному коду N, являющемуся конечным результатом цифроаналоговой обработки.
Затем получают разностный сигнал ошибки U, равный
U Ер f (t)(t) -соз;з(и) - - coso(t) .sin(u) 2) ЕО- f((t) - /i(u)
Аргумент /з(и) изменяют в зависимости от сигнала и так, чтобы сигнал ошибки U стремился к нулю. В этом случае o(t) (u), а выходной код N является цифровым эквивалентом преобразуемого параметра о((Ё).,При изменении параметра a(t) во времени в таком методе код N будет отсле- лсиВать его значение, постоянно компенсируя через изменение сигнал ошибки и.
Устройство для реализации предлагаемого способа состоит из блока I возбуждения двигателя 2, блоков 3 и 4 хранения аналоговых сигналов, регуляторов 5 и 6 напряжения аналоговых сумматоров 7-9, аналого-цифровых перемножителей 10 и.11, фильтра 12, интегратора 13, преобразователя напряжение - частота (ПНЧ) 14, блока 15 знака, реверсивного счетчика 16 и синусно-косинусного цифрового преобразователя 17, Блок возбуждения двигателя имеет три входа управления (Вх. 1 , ВХ..2.И Вх.З) режимом . движения двигателя, соответственно с помощью задага-1Я максимума I. тока запитки, фазовой скорости движения tt/ и интервала 1} между ступеньками тока. Ес- V(H блок возбуждения двигателя выполняется по схеме с внешней токовой обратной связью, то он имеет еще два входа (Вх.4 и Вх.5) для подключения к резистора обратной связи ос1 ос2 включенным в цепь за- пктки обмоток двигателя (указанные цепи показаны на чертеже пунктиром). Токозвые выходы вых.1 и вых,2 блока 1 подключены к обмоткам двигателя 2.и информационным входам блоков 3 и 4 хранения аналоговых сигналов. Синхронизирующий вых,5 блока 1 соединен с управляющими входами блоков 3 и 4, выходы которых подключены к одним из входов сумматоров 7 и 8. Вых.З и 4
блока 1 через регуляторы 5 и 6 свя- заны с другими входами сумматоров 7 и 8, Выходы сумматоров 7 и 6 связаны с аналоговыми входами перемножи- тёлей 10 и 11, цифровые входы которы связаны соответственно с синусным и косинусным выходами преобразователя 17, вход которого подключен к выходу реверсивного счетчика 16, Выходы перемножителей 10 и 11 соединены с выходами сумматора 9, выход которого через последовательно включенные . Фильтр 12 и интегратор 13 связан с входом преобразователя 14 и блока 15 знака. Выходы последних соединены соответственно с тактовыми и знаковым входами реверсивного счетчика 16
Устройство работает следукщим образом.
Двигатель 2 с двумя ортогональными обмотками запитывают от блока 1 возбуждения двумя ступенчато изменяющимися синусно-косинусными токами.
Далее выделяют сигналы ЭДС Е (t) и EjCt) из суммарного напряжения и и и„. на обмотках двигателя в дискретных точках. Для этого напряжения и , и и с обмоток двигателя подают на информационные входы блоков 3 и 4 хранения. На входы управления этих блоков подают сигнал синхронизации с вых.5 блока 1. Этот сигнал представляет собой короткий им- пульс, по которому происходит запись напряжений U и U в блоки хранения. В результате записи на выходе блоков 3 и 4 хранения появляются напряжения и, и и
Ef момент записи. Момент заI писи, т.е. момент поступления им- цульса синхронизации с блока 1, непосредственно предшествует очередному скачку тока в обмотках двигателя. Таким образом, с помощью элементов аналоговой памяти в виде блоков 3 и 4 Формируют исходные ступенчатые сигналы, равные напряжениям на обмотках двигателя в воменты перед скачком токов запитки и сохраняющие свое значение между этими моментами.
Вычитают из исходных ступенчатых сигналов сигналы, равные падению напряжения от Tolfa запитки на внешнем активном сопротивлении цепи запитки. Для этого на вых.З и 4 Формируют напряжения
из
и.
UQ- f (t)sincjt и. . f (t)cosW t
72
где UQ kljji k - постоянный коэффициент.
Пропускают эти сигналы через регуляторы 5 и 6 и устанавливают на их выходах напряжения, равные
и
RI
R ,-f (t) -sinwt
и
R2 lo Rj f(t)-cosa;t ,
Сигналы ЭДС Е(t) и ) получают на выходе сумматоров 7 и 8 после вычитания сигналов с блоков 3, 5 и 4, 6 соответственно.
По полз енным ступенчатым синусно- косинусным Сигналам ЭДС Е (t) и ) определяют цифровой код положения ротора путем компенсационного следящего аналого-цифрового преобра5
0
5
0
0
зования с Фильтрацией высокочастотной составляющей и интегрированием сигнала ошибки. Для этого подают сигналы ЭДС на аналоговый вход перемножителей 10 и 11. На цифровые входы перемножителей поступают коды с си- нусно-косинусного преобразователя 17, на вход которого поступает цифровой код N с реверсивного счетчика 16. В качестве преобразоватепя может быть использовано любое постоянное программируемое запоминающее устройство с синусно-косинусной прошивкой. Полученные после перемножения сигналы с выходов перемножителей 10 и 11 вычитаются аналоговым сумматором 9. В ре- . зультате на выходе cy iмaтopa получают сигнал ошибки. После Фильтрации и интегрирования сигнала ошибки блоками 12 и 13 он поступает на входы ПНЧ 14 и блока 15 знака. В зависимости от знака и значения сигнала ошибки реверсивный счетчик осуществляет изменения кода N. на его выходе. Это изменение делают таким, чтобы сиг- , нал ошибки на выходе.блока 9 при изменении N стремился к нулю. В этом случае по цифровому коду N на выходе реверсивного счетчика определяют текущее положение ротора двигателя.
Таким образом, предлагаемый способ по сравнению с известным позволяет повысить точность определения положения ротора двигателя и обладает по сравнению с ним рядом преимуществ.
При увеличении точности расширяется и диапазон допустимых скоростей движения ротора, так как точность выделения и обработки сигналов ЭДС не зависит от их уровня и частоты.
0
5
Обеспечивается возможность точного определения Ьоложения ротора шн- .рок ого класса двигателей, имеющих большую и непостоянную величину ин- дуктивности обмоток (например, пленарного шагового двигателя на воздушной подушке).
Существенно упрощается реализующее способ устройство при резком сокращении в нем числа необходимых регулировок - йсего до двух.
Исключаются грубые случайные ощиб- ки определения положения ротора, т.е увеличивается помехозащищенность за счет наличия эффекта усреднения конечного результата. Формула изобрете.ния
Способ определения положения рото- ,ра щагового двигателя с парами орто-
гонально расположеннь1х обмоток, вклю чакнций питание одной обмотки в паре синусоидальным, а другой - косинусо- идальным токами, выделение на каждой обмотке ЭДС движения и преобразовани их в цифровой код, о т л и,ч а ю - щ и и с я тем, что, с целью повьппе- ния точности, упомянутые токи изменяют скачками, ЭДС движения вьщеляют в моменты времени, предшествующие скачкам, вычитают: из них падения напряжения на активном сопротивлении обмоток и результаты преобразуют в цифровой код посредством нелинейного компенсационного аналого-цифрового преобразования с фильтрацией и интегрированием ошибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| СПОСОБ БЕЗДАТЧИКОВОЙ ОЦЕНКИ УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА МНОГОФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2428784C1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU743002A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Преобразователь кода в угол поворота вала | 1980 |
|
SU942103A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Функциональный преобразователь угла поворота вала в код | 1988 |
|
SU1589394A1 |
Изобретение относится к электротехнике, в частности к системам автоматического управления, и может быть использовано в замкнутом цифровом электроприводе с шаговыми и синхронными двигателями без применения специальных датчиков положения. Цель изобретения состоит в повышении точности определения. Способ определения положения ротора двигателя основан на выделении сигналов ЭДС движения с ортогонально расположенных обмоток двигателя и последующей их аналого-цифровой обработке. Отличие способа от известных заключается в том, что сигналы ЭДС выделяют путем разделения во времени процесса управления двигателем и измерения сигналов его ЭДС движения, а обработку сигналов ЭДС производят с помощью компенсационного следящего аналого-цифрового преобразования с фильтрацией высокочастотной составляющей и интегрированием сигнала ошибки. 1 ил.
| 0 |
|
SU340421A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1487144, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
