Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано в системах автоматического управления и механизмах с широким диапазоном частоты вращения.
Целью изобретения является повышение надежности и уменьшение массо- габаритных показателей вентильного электропривода о
На фиг. 1 изображена функциональная схема вентильно го электропривода, на фиг. 2 - функциональная схема вычислителя.
Вентильный электропривод содержит двухфазную синхронную машину 1, механически связанную с датчиком 2 положения ротора, выполненным а виде вращающегося трансформатора г синусной 3 и косинусной 4 обмотками. Синусная обмотка 3 подключена к синусной якорной обмотке 5 синхронной машины 1 черет послеговательно включенные первый фаточувствительный выпрямитель Ь и первый суммирующий усилитель 7„ Косинусная обмотка 4 вращающегося трансформатора . подключена к косинусной якорной обмотке 8 синхронной машины 1 через последовательно включенные второй фаэочувствительный выпрямитель 9 и второй суммирующий усилитель 10.Вентильный электропривод содержит также источник 11 входного сигнала, подключенный к обмотке 12 возбуждения датчика 2 положения ротора, первый 13 и второй 14 умножители, первые входы которых объединены. Электропривод содержит дополнительно четыре апериодических звена 15-18, первый 19 и второй 20 блоки измерения фазы, вычислитель 21, цифроана- логовый функциональный преобразователь 22 Тангенс, цифроаналоговый функциональный преобразователь 23 Синус, цифроаналоговый функциональный преобразователь 24 Косинус, Каждый блок 19, 20 измерения фазы выполнен в виде последовательно соединенных делителя 25 напряжений, аналого-цифрового преобразователя 26 и цифрового функционального преобразователя 27 Арктангенс Первый и второй входы делителя 25 напряжений представляют собой первый и второй входы блока 19(20) измерения фазы, а выход цифрового функционального преобразователя 27 Арктангенс - выход блока 19(20) измерения фазы. Цифроаналого- вые функциональные преобразователи 22, 23, 24 тригонометрических функций выполнены каждый в виде последовательно соединенных цифрового функционального преобразователя 28(29, 30) соответствующей функции и цифро- аналогового преобразователя 31„
Первые входы умножителей 13, 14 подключены к выходу цифроаналогового преобразователя 22 Тангенс, вторые входы первого 13 и второго 14 умножителей подключены соответственно к выходу цифроаналогового функционального преобразователя 23 Синус и выходу цифроаналогового функционального преобразователя 24 Косинус. Выходы первого 13 и второго 14 умножителей подключены соответственно через первое 15 и второе 16 апериодическое звено к вторым входам первого 7 и второго 10 суммирующих усилителей соответственно. Первые и вторые входы блоков 19, 22 измерения фазы подключены соответственно к синусной 3 и косинусной обмоткам вращающегося трансформатора, причем входы второго блока 20 измерения фазы подключены не
посредственно, а входы первого блока 19 - через первое 17 и четвертое 18 апериодическое звено соответственно. Выход первого блока 19 измерения фазы подключен к первому входу вычислителя 21, выход которого подключен к входу цифроаналогового функционального преобразователя 22 Тангенс Выход второго блока 20 измерения фазы подключен к второму входу вычислителя 21 и входам цифроаналоговых функциональных преобразователей Синус 23 и Косинус 24.
Вычислитель 21 реализует функцию У У4- У , при у,, О, Уг 0,у,«: О, у,0, и у 7Г-(уг- у,) лри у 0, у2 0;гле у, yt - коды чисел
0
5
0
5
0
5
0
на пя
первом и втором входах 21 соответственно, к
вычислите- 3,14.
Вычислитель 21 выполнен, например, в виде первого 32 и второго 33 сумматоров (фиг.2), коммутатора 34, логических элементов НЕ 35 и И 36, причем первый вход первого сумматора 32 подключен к выходу второго блока 20 измерения фазы, а его второй вход - к выходу первого блока 19 измерения фазы, на первый вход второго сумматора 33 подается код числа II , а второй его вход соединен с выходом первого сумматора 32, выходы первого 32 и второго 33 сумматоров соединены соответственно с первым и вторым входами коммутатора 34, управляющий вход которого соединен с выходом логического элемента И 36, первый вход которого соеаинен со старшим разрядом выхода второго блока 20 измерения фазы, а второй вход через логический элемент НЕ 35 - со старшим разрядом выхода первого блока 19 измерения фазы, выход коммутатора 34 соединен с входом цифроаналогового функционального преобразователя 22 Тангенс
Вентильный электропривод работает следующим образом.
На обмотку 12 возбуждения датчика 2 положения ротора поступает от источника 11 входного сигнала переменное напряжение
,. sin(2/nf0t), (1)
Vuv
где U
- амплитуда напряжения управления,
о - опорная частота модуляции. На выходах синусной 3 и косинусной 4 обмоток датчика 2 положения роtjmfi
тора возникают переменные напряжения
U
К,. U. sin2nf Ot. sin(mCOt) Ki uym sin2iife t.cos(mOX)
: ОС - угол поворота ротора синхронной машины 1, коэффициент трансформа- ции вращающегося трансформатора ,
число пар полюсов синхронной машины 1 и датчика 2 по ложения ротора,-
СО - частота вращения синхронной машины 1.
Пройдя через первый 6 и второй 9 азочувствительные выпрямители, эти апряжения преобразуются в напряже- 20 ия U
U4 де (0 t
К
m
J7
u« и,
де Kg
и U
к к
К
UM -sin(mG)t-tf),
(3)
f
Т, лг utjrr
,. Кг U cosCmWt-lf)
- коэффициент передачи фа- зочунствительного выпрямителя,
« avctf mCi}, - сдвиг по фазе между выходным и входным напряжениями фазочувстви- тельного выпрямителя, постоянная времени фазо- чувствительного пыпрямите- ля ,
25
30
IS
- К Kv U4m-sin27f0t- sinCmut -ft),ft
К.. Ki-u.... .t-T ITSS:-Г15T -|i), (5)
Kr К
sinZ nf 0 t cos(mft)t
-(
1635243
На суммирующих входах первого 7 и второго 10 суммирующих усилителей из этих напряжений вычитаются напряжения обратной связи по частоте вращения U,5 и 1.
Рассмотрим процесс формирования этих напряжений.
На первый и второй входы первого измерителя 19 фазы поступают напряжения U47 и , снимаемые с выходов третьего 17 и четвертого 18 апериодических звеньев:
ип
К, Kj U.
U18 K1
г- sin(m(0t К
(
U.sin27f0t
cos(m«t -J3)
где К з - коэффициент передачи третьего 17 и четвертого 18 апериодических звеньев, f} arctpmWTj - сдвиг по фазе между выходным и входным напряжением третьего 17 и четвертого 18 апериодических звеньев,
Tj - постоянная времени третьего 17 и четвертого 18 апериодических звеньев. С помощью делителя 25 напряжений определяется отношение этих напряжений
-ft)
Г15T
-(



| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| Преобразователь угла поворота вала в код | 1987 |
|
SU1438000A1 |
| Преобразователь угол-код | 1986 |
|
SU1336242A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1697055A1 |
| Преобразователь сигналов синусно-косинусного датчика угла в код | 1982 |
|
SU1034059A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД | 2017 |
|
RU2659468C1 |

Изобретение относится к электротехнике н может быть использ пано в системах управления с широким диапазоном частоты вращения. Целью изобретения является повышение надежности и уменьшение массога- баритных показателей. Для достижения указанной цели вентильный электропривод дополнительно содержит четыре апериодических твена 15-18, блоки 19, 20 измерения фаты, вычислитель 21, цифроаналоговые функциональные преобразователи 2, 23, 24 тангенс, синус и косинус соответственно. Напряжение с синусной и косинусной обмотки датчика жения ротора поступает на блок 19 через апериодические звенья 17, 18 а на блок 20 Heir, «-родственно. Измеренные фаты сравниваются в вычислителе 21. Полученный результат содержит информацию о частоте вращения ротора„ Сигнал с выхода вычислителя 21 проходит через функциональный преобразователь 22 помножается на синус и косинус в блоках перемножения 13, 14 и используется как корректирующий в основном канале формирования токов в двухфазной синхронной машине 1. 2 ил. SS (Л
Эти напряжения с помощью аналого- цифрового преобразователя 26 преобра- зуется в цифровой код, который затем поступает на вход цифрового функционального преобразователя 25 Арктангенс, который реализует функцию Арктангенс. Код числа у( на выходе цифрового функционального преобразователя 27 Арктангенс блока 19 характеризует фазу напряжений U ,г и U,8;
у, arctg tg(m(0t -()
К« U9mtsin2/iTfot- sitvmQt
.
cosraCOt
Отношение напряжений (7) с помощью аналого-цифрового преобразователя 26 преобразуется в цифровой код, который с помощью цифрового функционального преобразователя 27 Арктанmolt
-/
(6)
где у - код числа на выходе цифрового функционального преобразователя Арктангенс 27 блока 19.
На первый и второй входы второго измерителя 20 фазы поступают соответ ственно напряжения 1Ц и U. С помощью делителя 25 напряжений вычисляется их отношение, которое равно
sitvmQt
cosraCOt
tgmCOt (7)
генс,
реализующего функцию арктангенса, преобразуется в код числа уг, величина которого характеризует фазу напряжений U
arctg(tgm(0t) raCOt,
(8)
2
yrt - код числа на пыходе цифрового функционального преобразователя 27 Арктангенс блока 20.
У а - У,
(5
при у, О,у2 0
У, - 0,у 0 (9)
-(УЯ , ) при у,: 0,угЈ О
У, 0,уг О
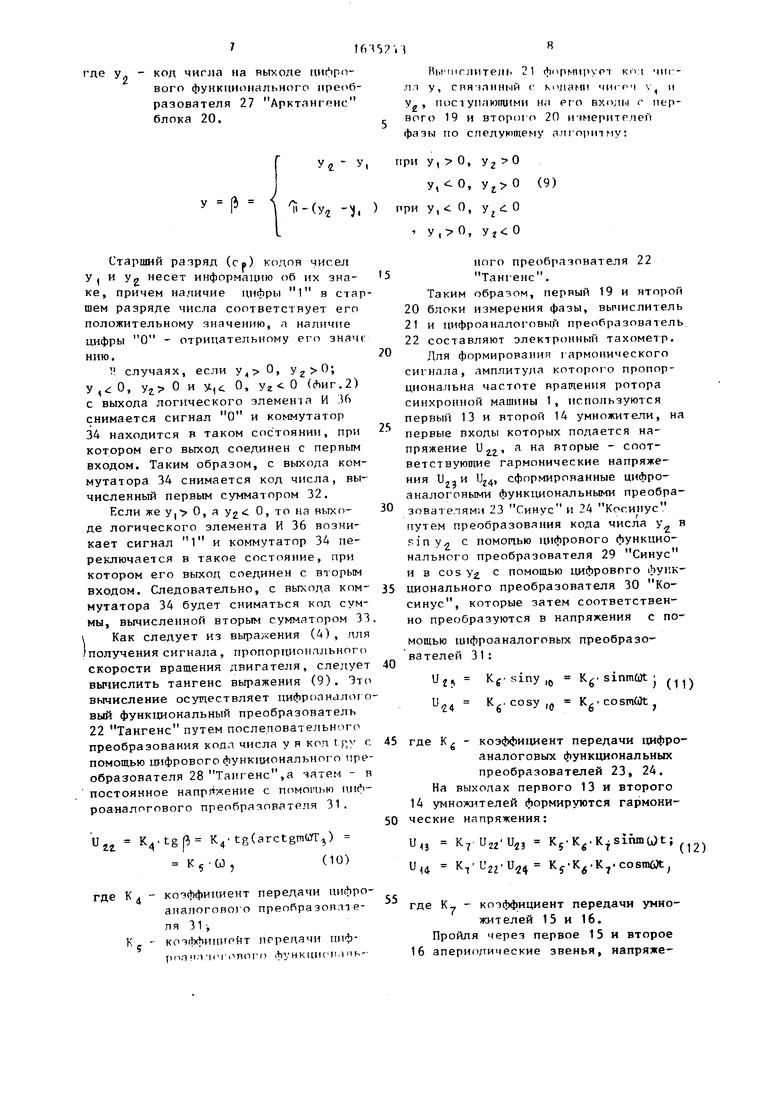
Старший разряд (ср) кодов чисел У, и у несет информацию об их знаке, причем наличие цифры 1 в старшем разряде числа соответствует его положительному значению, а наличие цифры О - отрицательному его значс нию.
V случаях, если у 0, У ,: О, yi 0 и у., 0, угс О (Лиг. 2) с выхода логического элемента И 36 снимается сигнал О и коммутатор 34 находится в таком состоянии, при котором его выход соединен с первым входом. Таким образом, с выхода комутатора 34 снимается код числа, вычисленный первым сумматором 32.
Если же у, 0, а уг 0, то на выходе логического элемента И 36 возникает сигнал 1 и коммутатор 34 пееключается в такое состояние, при котором его выход соединен с вторым входом. Следовательно, с выхода коммутатора 34 будет сниматься код сумы, вычисленной вторым сумматором 33. Как следует из выра хения (4) , для получения сигнала, пропорционального скорости вращения двигателя, следует вычислить тангенс выражения (9). Это вычисление осуществляет цифроаналого- вый функциональный преобразователь 22 Тангенс путем послеповательного преобразования кода числа у в коп t p,y с помощью цифрового функционального преобразователя 28 Тангенс ,а затем - в постоянное напряжение с помопью циф- роаналогового преобразователя 31.
игг K4. tgP K4 tg(arctgmOT3)
Кс -Q
(10)
К 4 - коэффициент передачи цифро- аналогового преобразователя 31-,
К - коэффициент передачи пнф- роп ма чоголого функциол.1 ьВычислитель 21 формирует чнг- лл у, связанный с кодами чнггч 4 и У2 , постунающими на его входы с первого 19 и второго 20 измерителен фазы по следующему алгоритму:
ного преобразователя 22 Тангенс. Таким обратом, первый 19 и второй
20блоки измерения фазы, вычислитель
21и дифроаналоговый преобразователь
22составляют электронный тахометр. Для формирования гармонического
сигнала, амплитуда которого пропорциональна частоте вращения ротора синхронной машины 1, используются первый 13 и второй 14 умножители, на первые входы которых подается напряжение и2г а на торые - соответствующие гармонические напряжения U2j и U24, сформированные цифро- аналоговыми функциональными преобразователями 23 Синус и 24 Косинус путем преобразования кода числа у. в sin у2 с помощью цифрового функционального преобразователя 29 Синус и в cos v z с помощью цифровпго ibyiiK- ционального преобразователя 30 Косинус, которые затем соответственно преобразуются в напряжения с по
40
мощью цнфроаналоговых преобразователей 3 1 :
Кг siny I0
К,, cosy
(О
Kg-sinmffltj (11)
К, cosmQt
о7
где Кй - коэффициент передачи цифро- аналоговых функциональных преобразователей 23, 24. На выходах первого 13 и второго 14 умножителей формируются гармони- ческие напряжения:
K-isInmcJt;
U13 К7 U22 %
W
т (12) Uu K1 U22.U24 Kj.-K6.K7.
где К., - коэффициент передачи умножителей 15 и 16. Пройдя через первое 15 и второе 16 апериодические звенья, напряжения ( 1 } ) мр-.мФрачукп сн и п. пршкчщя обра 1 нон I-RII in no скорости
t t Kg. К,-Кб-К7.« sin( -4)
К.СО- sindnCOt -V) ;
(13)
Кй К7 (m(Ol -(|i) К, СО- cosCmOL -1|) ,
где К,, - коэффициент мерр ычн первого 15 и т opoi о 16 апр- риоднческих чвеяьев,
, К,„. (и6-Ц5 ,- Кг-П 4in(r-Wt -tf) - К,-W- sin(m(jt -Ц ),
to K,0. (Uq-U,6) К,., ,2.Uym.cos(m(Ot -If) - К0.,0 cos(md4 -(,,
пе К
0
Jq I6 |Ч 0 L 2 Ч т - коэффициент передачи перк«-ь о к„;
вого 9 и второго 10 усилителей . Если обозначит ь
К
- К,
5 п о 42 1 id урлпнения И 4) примуi вид
И7 К(, и„т. sin(m(Jt -If) - К ,2 СО sin(mfOt - (| ), о
U,0 К„. Uym. sin(;n(0t -if) - K|irCO cos(nui)t -ф),
Пчя нормальной раОоты схемы электропривода необходимо вьшоанение условия
If - Ц(17)
т.е. фазовый сдвиг (f , вносимый первым 7 и вторым 8 фспочувствительным выпрямителями, должен равняться фазовому сдвигу ( , вносимому первым и вторым апериодическими звеньями.
При выполнении условия (17) уравнения (16) имеют вид
и (K,,-Uum- K((2.CO)-sin( -Ц) U)0 (K(|-U,jm- K12.U)-cos(mUt -tf),
(18)
В соответствии с принципом действия электродвигателя 1 эти напряжения образуют в расточке его статора вращающееся магнитное поле, которое создает вращающий момент двигателя, приводящий ротор синхронной машины 1 во вращение с частотой, пропорциональной амплитуде напряжений и U)e
Следовательно
(0 Кдв( К14 -СО ), (19)
где Kie коэффициент, определяемый . конструктивными параметрами синхронной машины 1.
6 , iI
Cj - ar г t c,r(i)Tg - гдвнг по ф.м 1 между входным и внхпднмм напряжениями первог о 15 и ,второго 16 апериодических
звеньев,
Г Ј - постоянная времени первого 15 и второго 16 апериодических звеньев,
10 о К,- Kg- Ky. Кь - суммарный коэффициент усипения11.1 выходах первого 9 и второго 10 суммирующих усилителей вочникают
нлиряжрнич IS
(14)
к„;
П5)
К
- К,
5 п о 42 1 id урлпнения И 4) примуi вид
(16)
Ш
Решая урлимение. (19) относительно скорости, получим
- J1A6 . , (20) 1 + КА6. К,„
Гглн коэффициент Кд6 К12 выбрать таким обратом, чтобы выполнялось не- равенст во
К , . К ,, 1 ,
дв «1
то уравнение (20) преобразуется в Уравнение
(3D
- U4n,
К
K U,m ,
(22)
(2
где
45
К
(2
Таким образом, вентильный электропривод поддерживает частоту вращения двигателя пропорциональной амплит-уде напряжения сигнала управления при выполнении условия (17). Регулировочная характеристика электропривода, как следует из уравнения (22), имеет линейный характер. Применение в схеме электропривода электронного тахометра позволяет измерять частоту вращения без использования дополнительной измерительной электрической машины, массогабаритные показатели которой намного выше массогабаритных показателей электрон- ных узлов, и надежность.ниже. Изобретение позволяет повысить надежность электропривода и уменьшить его мас- согабаритные показатели.
Формула изобретения
Вентильный электропривод, содержащий двухфазную синхрон- - ную машину, механически связанную с датчиком положения ротора, выполненным в виде вращающегося трансформатора, синусная обмотка которого подключена к синусной якорной обмотке синхронной машины через последовательно включенные первый фазочувствительный выпрямитель и первый суммирующий усилитель, а косинусная обмотка подключена к косинусной якорной обмотке синхронной машины через последовательно включенные второй фазочувствительный выпрямитель и второй суммирующий усилитель, источник входного сигнала, подключенный к обмотке возбуждения вращающегося трансформатора, первый и второй умножители, первые входы которых объединены, отличающийся тем, что, с целью повышения надежности электропривода и уменьшения массогабаритных показателей, в него дополнительно введены четыре апериодических звена, первый и второй блоки измерения фазы, вычислитель, цифро- аналоговый функциональный преобразователь Тангенс, цифроаналоговый функциональный преобразователь Синус, цифроаналоговый функциональный преобразователь Косинус, причем каждый блок измерения фазы выполнен в виде последовательно соединенных делителя напряжений, аналого-цифрового преобразователя и
5
0
цифрового функционального преобразователя Арктангенс, первый и второй входы делителя напряжения образуют первый и второй входы блока измерения фазы, а выход цифрового функционального преобразователя Арктангенс - выход блока измерения фазы, первые входы умножителей подключены к выходу иифроаналогового функционального преобразователя Тангенс, вторые выходы первого и второго умножителей подключены соответственно к выходу цифроаналогово- го функционального пребраэователя Синус и выходу цифроаналогового функционального преобразователя Косинус, я выходы первого и- второго умножителей подключены через первое и второе апериодические звенья к вторым входам первого и второго суммирующих усилителей соответственно, первый и второй входы блоков измерения фазы подключены соответственно к синусной, и косинусной обмоткам вращающегося трансформатора, причем входы второго блока измерения фазы подключены непосредственно, а входы первого блока - через третье и четвертое апериодическое звено соответственно, выход первого блока измерения фазы подключен к первому входу вычислителя, выход которого подключен к входу цифроаналогового функционального преобразователя Тангенс, а выход второго блока измерения фазы подключен к второму входу вычислителя и входам цифроаналоговых функцио0 нальных преобразователей Синус и Косинус, причем вычислитель реализует функцию у ( при у О, , у,0, , у4сО, и У ft -(у«-Уг), при У 0, у2 О,
5 где yf и у - коды чисел на первом и втором входах вычислителя соответственно, й 3,14.
5
0
5
| Способ управления высокоскоростным бесконтактным двигателем постоянного тока | 1974 |
|
SU660159A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электропривод | 1986 |
|
SU1619372A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
