Фиг.2
Изобретение относится к средствам автоматизации горных машин, предназначено для контроля расхода рабочей жидкости в гидроприводах и может использоваться для создания систем автоматического управления и технической диагностики горных машин и является дополнительным к основному авт. св. № .
Цель изобретения - повышение точности измерения при одновременном снижении затрат на измерение скорости потока жидкости в двух противоположных направлениях.
На фиг. 1 изображен расходомер для гидроприводов горных машин; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - функциональная схема электронного блока.
Б- состав расходомера входят корпус 1, вставленная в него пробка 2 с закрепленным на ней концом 3 чувствительного элемента 4, выполненного в виде пластины, на втором конце 5 которого укреплено рабо- . чее тело 6, чувствительный элемент 4 соединен с входом электронного блока 7 и ориентирован широкими гранями 8 и 9 параллельно направлению потока рабочей жидкости, а продольная ось его 10 перпендикулярна направлению перемещения рабочей жидкости. Рабочее тело 6 представляет собой основное цилиндрическое рабочее тело 11 и дополнительное цилиндрическое рабочее тело 12 с направляющими крыловидного профиля, которые соединены между собой и пластиной своими хвостовыми частями в месте крепления к чувствительному элементу 4 так, что они образуют центральносимметрич- ную фигуру с центром симметрии в точке соединения.
Расходомер работает следующим образом.
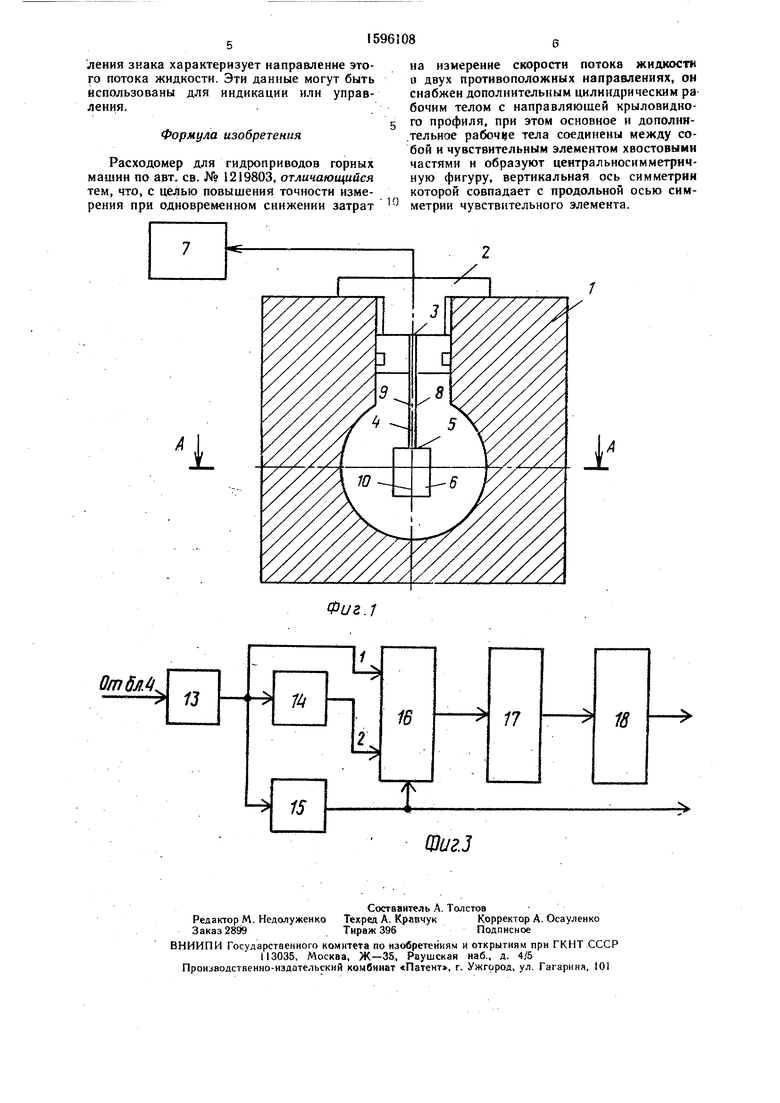
При движении рабочей жидкости в канале корпуса 1 со скоростью v (фиг. 2, стрелка) на рабочее тело б действуют подъемная сила Р„ и сила лобового сопротивления FC, при этом сила тяжести и выталкивающая сила действуют в направлении наибольшей жесткости чувствительного элемента 4 и не оказывают существенного влияния на результат измерения. Сила лобового сопротивления FC параллельна направлению потока и широким граням 8 и 9 чувствительного элемента 4. При таком направлении ее влияние на деформацию чувствительного элемента 4 также пренебрежимо мало. Подъе.ная сила Р„, действующая на рабочее тело б, определяется сочетанием двух .сил; подъемной силы, действующей на крыловидную направляющую основного рабочего тела И, и силы, действующей на обрат- ный профиль направляющей дополнительного рабочего тела 12. Обе они направлены в одну сторону и на фиг. 2 схематически. изображены одной силой Fn.
Равнодействующая сила Рр (векторная сумма сил FC и Р„)приводит к деформации
чувствительного элемента 4, закрепленного неподвижным концом 3 в пробке 2. Таким.;- образом, деформация чувствительного элемента 4 вследствие малой податливости. чувствительного элемента 4 в направлении силы FC, пропорциональна величине подъемной силы Fn.
При движении потока л идкости в противоположном направлении силы Fn, PC {на фиг. 2, пунктир) действуют на рабочее тело 6 (в силу его центральной симметричности) аналогично описанному с той разницей, что приводят к отклонению (деформации) чувствительного элемента 4 в противоположную сторону.
5 Чувствительный элемент 4, представляющий собой, например, металлическую пластину с наклеенными на нее тензорезисторами, преобразует величину деформации .в электрический сигнал, который поступает на вход электронного блока 7, где он усиливается, 0 обрабатывается и регистрируется.
Поскольку зависимость между подъемной силой Fn и скоростью потока н идкости имеет нелинейный характер, для линериза- ции выходного сигнала может быть исполь- ,;,с зована таблица значений подъемной силы Fn и скорости потока v, записанная, HanpH- мер, в запоминающем устройстве. В этом случае электронный блок 7, например, для случая с использованием теизометрического чувствительного элемента 4 содержит 30 (фиг. 3) тензоусилитель 13, выход которого соединен с входами инвертора 14, блока 15 выделения знака и первым входом коммутатора 16, второй вход которого соединен с выходом инвертора 14, а управляющий вход его - с выходом блока 15 выде- 35 ления знака. Выход коммутатора 16 соединен с входом аналого-цифрового преобразователя 17, а выход последнего - с входом постоянного запоминающего устройства 18.
Электронный блок 7 работает следующим образом.
Сигнал от тензометрического чувствительного элемента 4 усиливается в тензо- усилителе 13 и поступает непосредственно, а также через инвертор 14 на входы коммутатора 16. Коммутатор 16 управляется 4с блоком 15 выделения знака, который может представлять собой, например, компаратор, так, чтобы на вход аналого-цифрового преобразователя 17 поступал всегда положительный сигнал. Цифровой код, соответствующий этому сигналу (абсолютной величи- 50 не подъемной силы Fn или 1-„) с выхода аналого-цифрового преобразователя 17 поступает на адресную шиНу постоянного запоминающего устройства 18, в котором записана таблица соответствия подъемной силы Р„ и скорости потока жидкости v, В резуль- 55 тате этого на тине данных постоян юго запоминающего устройства 18 появится код, соответствующий скорости потока (расходу) жидкости, а сигнал с выхода блока б выделения знака характеризует направление это- Го потока жидкости. Эти данные могут быть использованы для индикации или управления.
Формула изобретения
Расходомер для гидроприводов горных машин по авт. св. № 1219803, отличающийся тем, что, с целью повышения точности измерения при одновременном снижении затрат
на измерение скорости потока жидкости и двух противоположных направлениях, он снабжен дополнительным цилиндрическим ра бочим телом с направляющей крыловидного профиля, при этом основное и дополнн- .тельное рабочее тела соединены между собой и чувствительным элементом хвостовыми частями и образуют центральиосимметрнч- ную фигуру, вертикальная ось симметрии которой совпадает с продольной осью симметрии чувствительного элемента.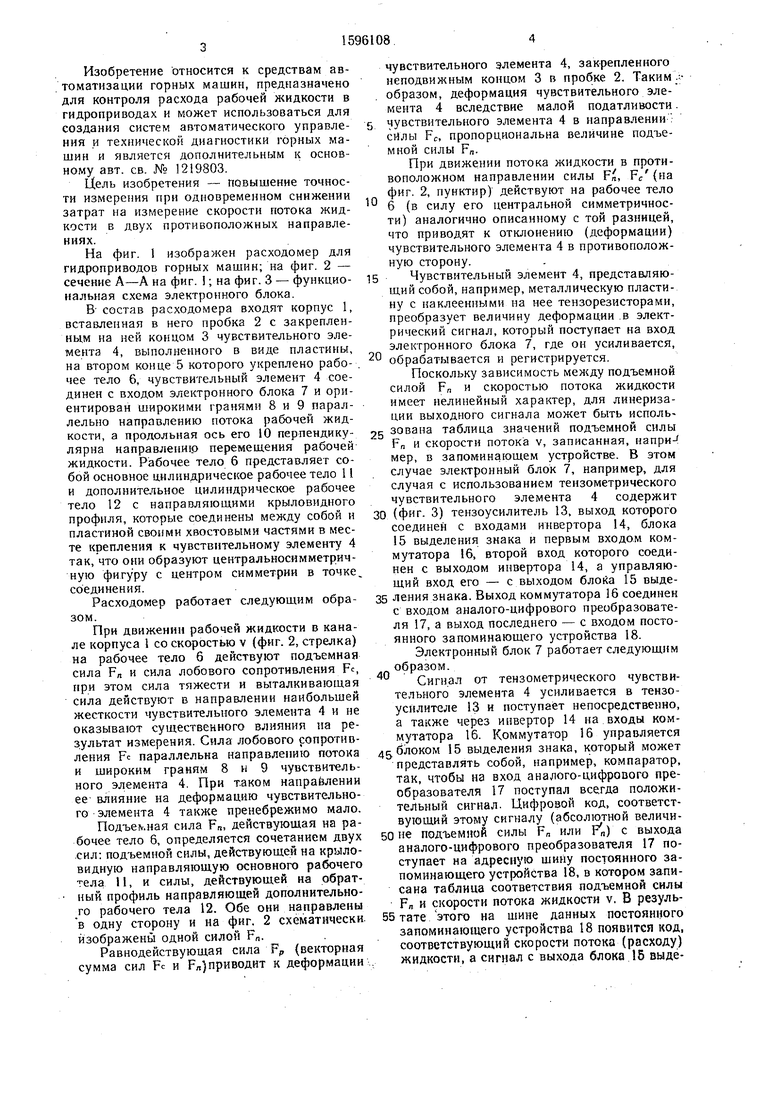
| название | год | авторы | номер документа |
|---|---|---|---|
| Расходомер для гидроприводов горных машин | 1984 |
|
SU1219803A1 |
| Способ контроля расхода рабочей жидкости в гидроприводах горных машин и устройство для его осуществления | 1986 |
|
SU1416690A1 |
| Способ управления гидродомкратами горных машин | 1986 |
|
SU1352053A1 |
| РАСХОДОМЕР | 2017 |
|
RU2643688C1 |
| Индикатор расхода жидкости | 1973 |
|
SU494605A1 |
| Расходомер | 1991 |
|
SU1813201A3 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ ГИДРОПРИВОДОВ И ГИДРОПЕРЕДАЧ | 2012 |
|
RU2495284C1 |
| ГИДРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2011 |
|
RU2457357C2 |
| Кориолисовый расходомер | 1991 |
|
SU1793234A1 |
| Датчик для измерения расхода жидкостей и газов | 1984 |
|
SU1483265A1 |
Изобретение относится к средствам автоматизации горных машин, предназначенных для контроля расхода рабочей жидкости в гидроприводах. Оно может быть использовано для создания систем автоматического управления и технической диагностики горных машин. Цель - повышение точности измерения при одновременном снижении затрат на измерение скорости потока рабочей жидкости /РЖ/ в двух противоположных направлениях. Расходомер включает корпус, в который вставлена пробка с закрепленным на ней концом чувствительного элемента в виде пластины. Чувствительный элемент соединен с входом электронного блока и ориентирован широкими гранями параллельно направлению потока РЖ, а его продольная ось перпендикулярна направлению перемещения РЖ. На втором конце чувствительного элемента закреплено рабочее тело /РТ/. Оно представляет собой основное цилиндрическое РТ 11 и дополнительное РТ 12. Между собой и пластиной РТ 11, 12 соединены своими хвостовыми частями и образуют центрально симметричную фигуру. Вертикальная ось симметрии совпадает с продольной осью симметрии чувствительного элемента. При движении РЖ в канале корпуса на РТ 11, 12 действует равнодействующая сила F р (векторная сумма сил F с и F п), которая приводит к деформации чувствительного элемента. 3 ил.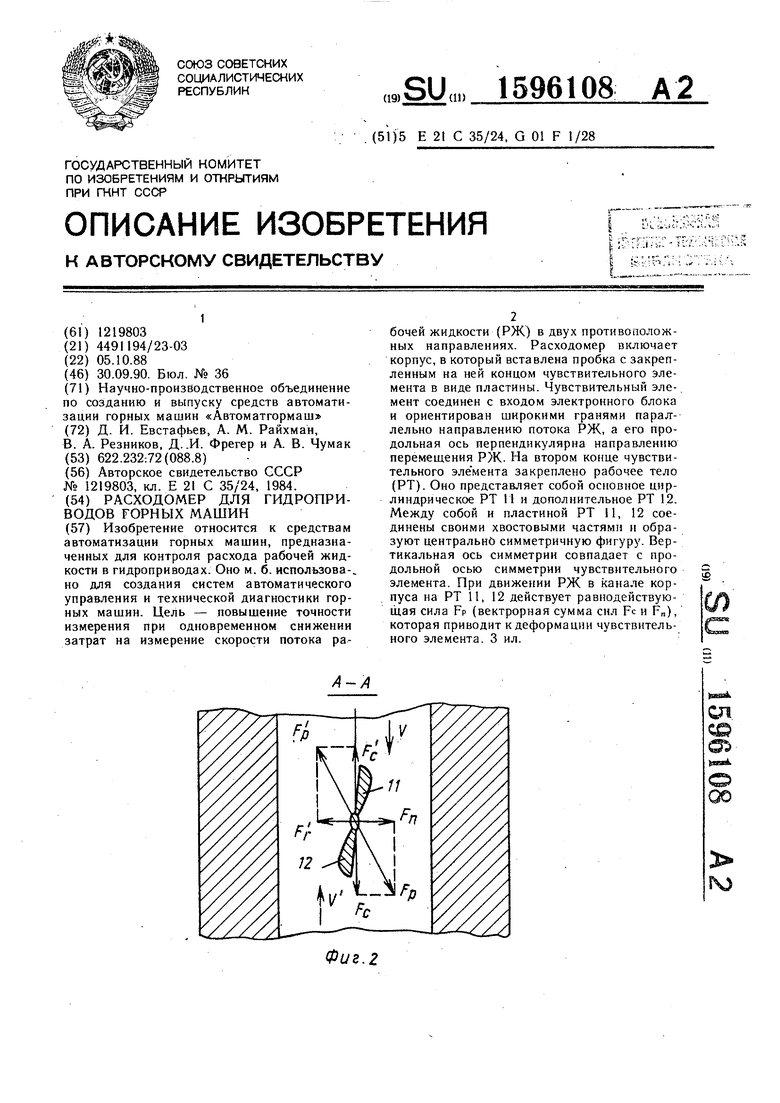
ФUZ.
| Расходомер для гидроприводов горных машин | 1984 |
|
SU1219803A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
