Изобретение относится к средства автоматизации горных машин, предназначено для контроля расхода рабочей жидкости в гидроприводах и может использоваться для создания систем автоматического управления и технической диагностики горных машин.
Цель изобретения - повьпиение точности измерения за счет компенсации влияния возмущающих воздействий, потерь на трение в шарнирных соединениях изменений веса и гидравлического сопротивления рабочего тела и чувствительного элемента из-за загрязнения их поверхностей во время эксплуатации.
На фиго 1 изображен предлагаемый расходомер; на фиг. 2 - сечение А-А на фиг. 1, на фиг. 3 - положени расходомера на горной машине.
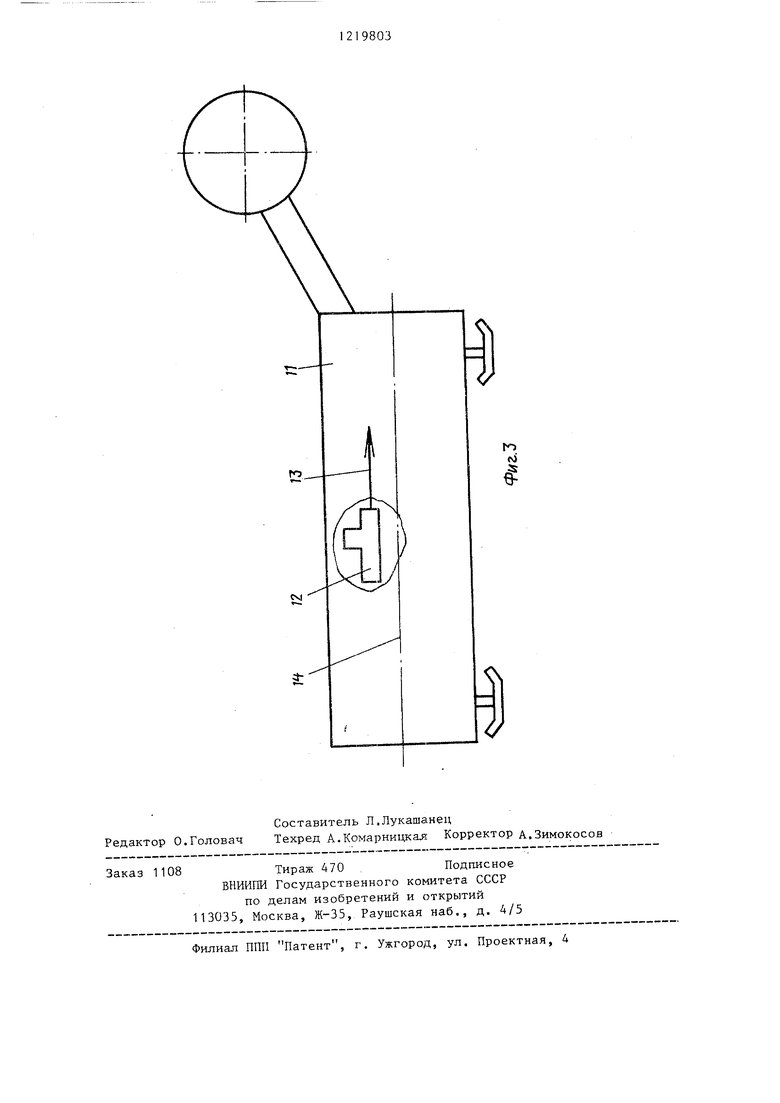
В состав расходомера входят корпус 1, вворачивающаяся в него пробка 2 с укрепленным в ней концом 3 чувствительного элемента 4, на втором конце 5 которого укреплено рабочее тело 6, а сам чувствительный элемент 4 соединен с входом электронного блока 7 и ориентирован таки образом, что его широкие грани 8 и 9 параллельны направлению потока рабочей жидкости, а продольная ось 10 перпендикулярна направлению рабочей жидкости. Рабочее тело 6, представляет собой цилиндр с образующей крыловидного профиля о
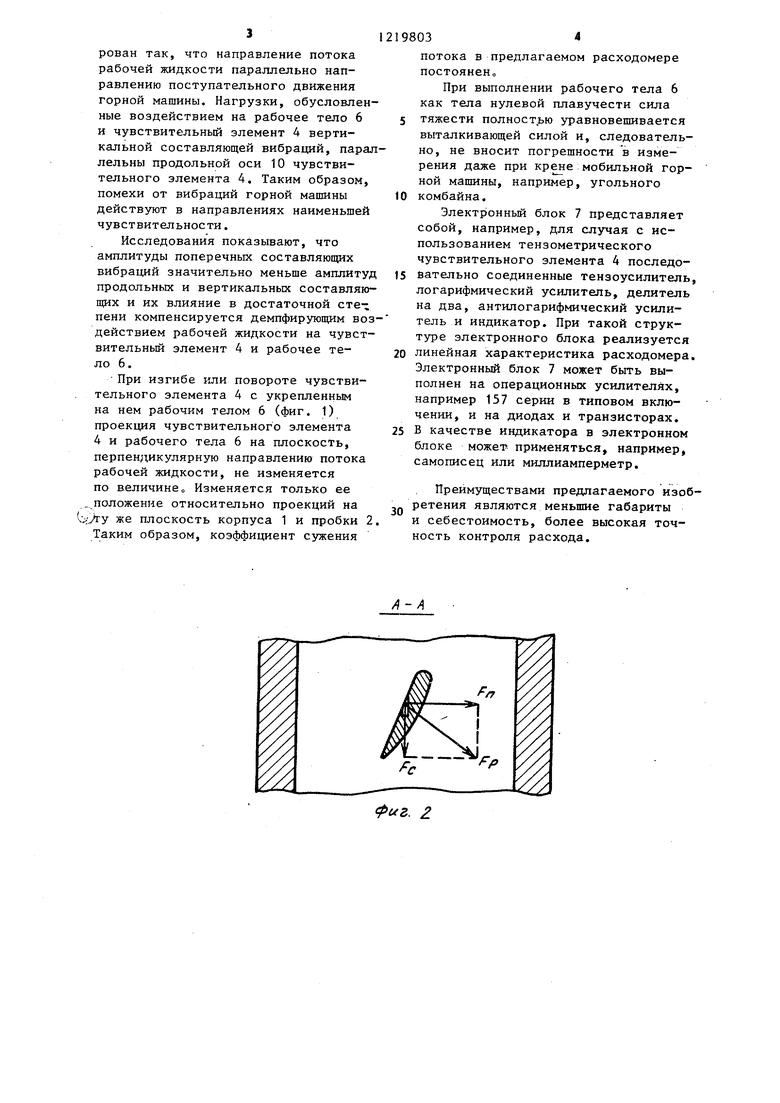
В корпусе угледобывающего комбайна 11 расходомер 12 расположен так, что направление потока 13 через него (указано стрелкой) параллельно продольной оси 14 горной машины (фиг. 3).
Расходомер работает следующим образом.
При движении рабочей жидкости в г канале корпуса 1 со скоростью V на его рабочее тело действуют подъемная сила F , сила лобового сопротивления FP и разность выталкивающей силы и. силы тяжести, направленных встречно Fg - Q . Сила тяжести и выталкивающая сила Q и F перпендикулярны плоскости чертежа и направлены вдоль продольной оси 10 чувствительного элемента 4, т.е. в направлении наибольшей жесткости чувствительного элемента 4 и, следовательно, их влияние на результат измерения пренебрежимо мало.
2198032
Сила лобового сопротивления F, (фиг. 2) параллельна направлению потока и широким граням 8 и 9 чувствительного элемента 4. При таком 5 направлении влияние силы лобового сопротивления F,, на деформацию чувствительного элемента 4 также пренебрежимо мало. Это обусловлено тем, что жесткость чувствительного 10 элемента 4 в направлении действия силы лобового сопротивления превышает жесткость его в направлении действия подьемной силы в К раз,
( К т-- , где Ь ширина апастинки
чувствительного элемента 4, h толщина).
При движении рабочей жидкости в корпусе 1 в направлении, пока20 ванном стрелкой на фиг. 2, на закрепленное на конце 5 рабочее тело 6 чувствительного элемента 4 действует подъемная сила. Величина подъемной силы определяется в соот25 ветствии с соотношением
gin tsi
(1)
где К - коэффициент пропорциональ- ности,
р - плотность жидкости, oi - угол атаки.
Сила FP J получаемая как векторная сумма силы и силы F. , приводит к деформации чувствительного элемента 4, закрепленного неподвижно концом 3 в пробке 2. Таким образом, деформация чувствительного элемента 4 вследствие малой податливости чувствительного элемента 4 в направлении силы сопротивления Fj. , пропорциональна величине подъемной силы Р , Чувствительный элемент 4, представляюшдй собой, например, металлическую пластину с наклеенными на нее тензорезисторами, преобразует величину деформации в электрический сигнал, которьм поступает . на вход электронного блока 7, где
он усиливается, обрабатывается и регистрируется. Аналогично усилиям G, FJ, и Рр компенсируются продольная и вертикальная составляющие вибраций корпуса. При этом нагрузки, вызванные продольной составляющей вибраций горной машины, действуют параллельно силе лобового сопроитвления F , так как корпус 1 расходомера ориенти
31
рован так, что направление потока рабочей жидкости параллельно направлению поступательного движения горной машины. Нагрузки, обусловленные воздействием на рабочее тело 6 и чувствительный элемент 4 вертикальной составляющей вибраций, параллельны продольной оси 10 чувствительного элемента 4. Таким образом, помехи от вибраций горной машины действуют в направлениях наименьшей чувствительности.
Исследования показывают, что амплитуды поперечных составляющих вибраций значительно меньше амплитуд продольных и вертикальных составляющих и их влияние в достаточной степени компенсируется демпфирующим воздействием рабочей жидкости на чувствительный элемент 4 и рабочее тело 6.
При изгибе или повороте чувствительного элемента 4 с укрепленным на нем рабочим телом 6 (фиг. 1) проекция чувствительного элемента 4 и рабочего тела 6 на плоскость, перпендикулярную направлению потока рабочей жидкости, не изменяется по величине Изменяется только ее .положение относительно проекций на v ry же плоскость корпуса 1 и пробки 2. Таким образом, коэффициент сужения
198034
потока в предлагаемом расходомере постоянеНо
При выполнении рабочего тела 6 как тела нулевой плавучести сила 5 тяжести полностью уравновешивается выталкивающей силой и, следовательно, не вносит погрешности в измерения даже при крене мобильной горной машины, например, угольного
10 комбайна.
Электронньй блок 7 представляет собой, например, для случая с использованием тензометрического чувствительного элемента 4 последо15 вательно соединенные тензоусилитель, логарифмический усилитель, делитель на два, антилогарифмический усилитель и индикатор. При такой структуре электронного блока реализуется
20 линейная характеристика расходомера. Электронный блок 7 может быть выполнен на операционных усилителях, например 157 серии в типовом включении, и на диодах и транзисторах.
25 В качестве индикатора в электронном блоке може-р применяться, например, самописец или миллиамперметр.
Преимуществами предлагаемого изоб- , ретения являются меньшие габариты и себестоимость, более высокая точность контроля расхода.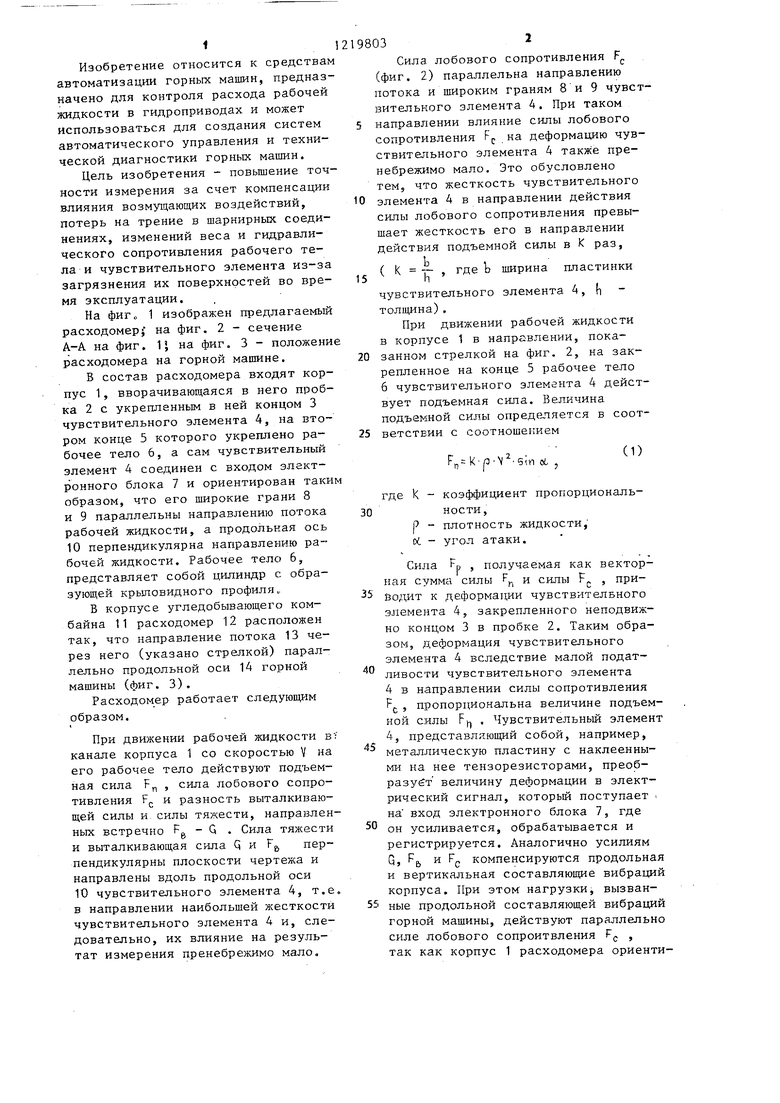
| название | год | авторы | номер документа |
|---|---|---|---|
| Расходомер для гидроприводов горных машин | 1988 |
|
SU1596108A2 |
| Способ контроля расхода рабочей жидкости в гидроприводах горных машин и устройство для его осуществления | 1986 |
|
SU1416690A1 |
| ДАТЧИК РАСХОДОМЕРА | 1997 |
|
RU2112216C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССОВОГО РАСХОДА ТЕКУЧИХ СРЕД | 2011 |
|
RU2488781C1 |
| ВИХРЕВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ РАСХОДОМЕР | 2000 |
|
RU2181878C1 |
| ГИДРОФИЗИЧЕСКОЕ УСТРОЙСТВО | 1988 |
|
SU1841094A1 |
| ВИХРЕВОЙ РАСХОДОМЕР | 2004 |
|
RU2279638C2 |
| КОРИОЛИСА РАСХОДОМЕР С ИСПОЛЬЗОВАНИЕМ ВОЛОКНА И АНИЗОТРОПНОГО МАТЕРИАЛА ДЛЯ РЕГУЛИРОВАНИЯ ВИБРАЦИОННЫХ ХАРАКТЕРИСТИК РАСХОДОМЕРА | 1997 |
|
RU2193163C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ОСЕВОЙ НАГРУЗКИ В КОМПОНОВКЕ БУРИЛЬНОЙ КОЛОННЫ | 2020 |
|
RU2778910C2 |
| Расходомер | 2018 |
|
RU2680107C1 |
фиг. 2
го
Cvj
Ю
Редактор 0.Головач
Составитель Л.Лукашанеи
Техред А.Комарницкал Корректор А.Зимокосов
Заказ 1108Тираж 470 . Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППИ Патент, г, Ужгород, ул. Проектная, 4
| Агейкин Д.И | |||
| и др | |||
| Датчики контроля и регулирования | |||
| Справочные материалы | |||
| - М.: Машиностроение, 1965 | |||
| Машины и нефтяное оборудование, 1972, № 2, с | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
