Изобретение относится к автоматическому управлению горными машинами и может быть использовано для автоматизации управления их гидроприводами
Целью, изобретения является повышение точности управления путем компенсации настабильности усилия, действующего на шток гидродомкрата.
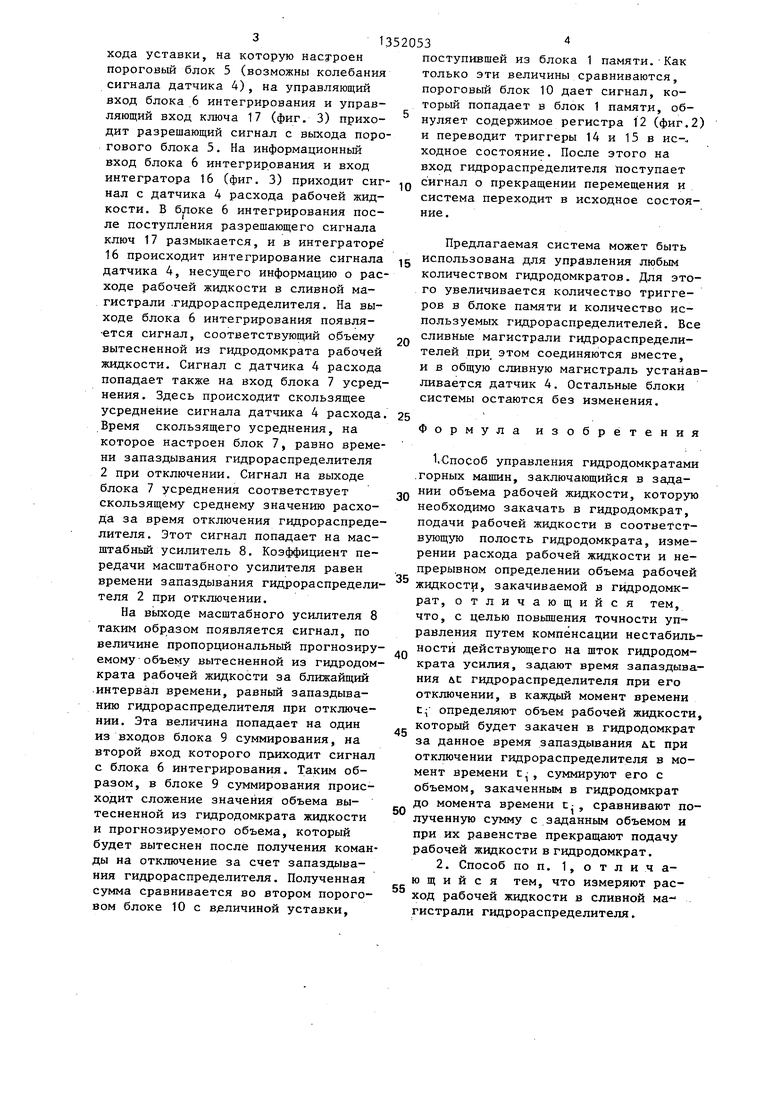
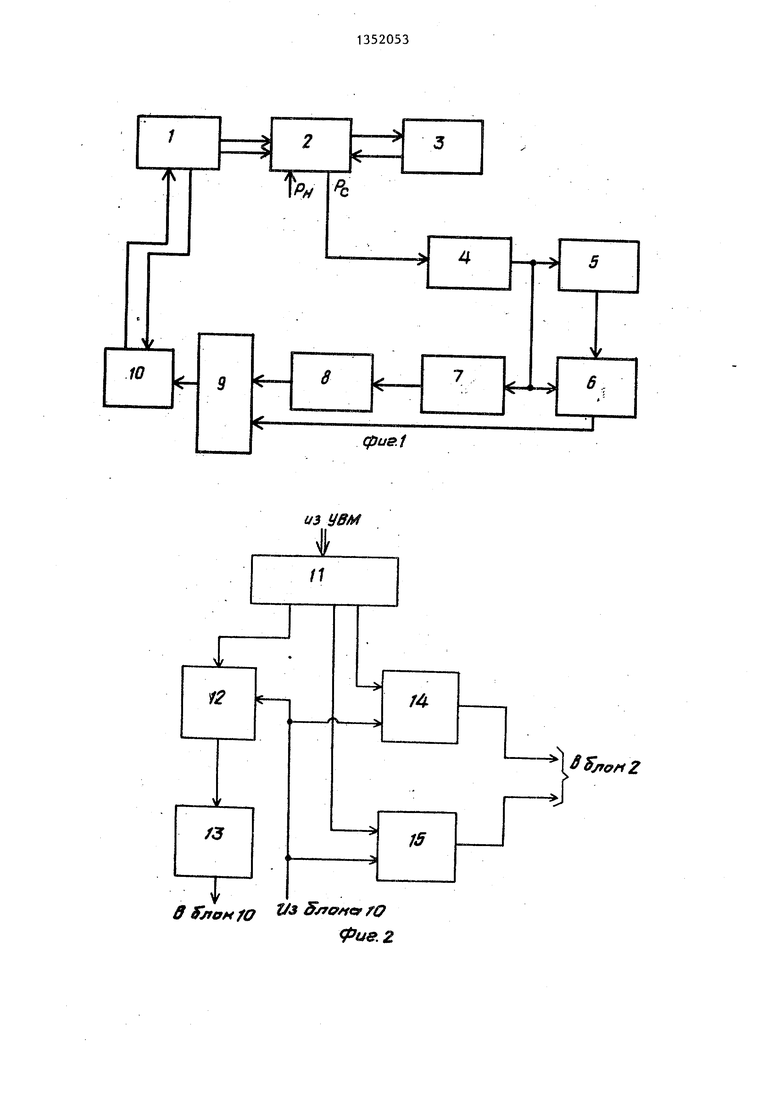
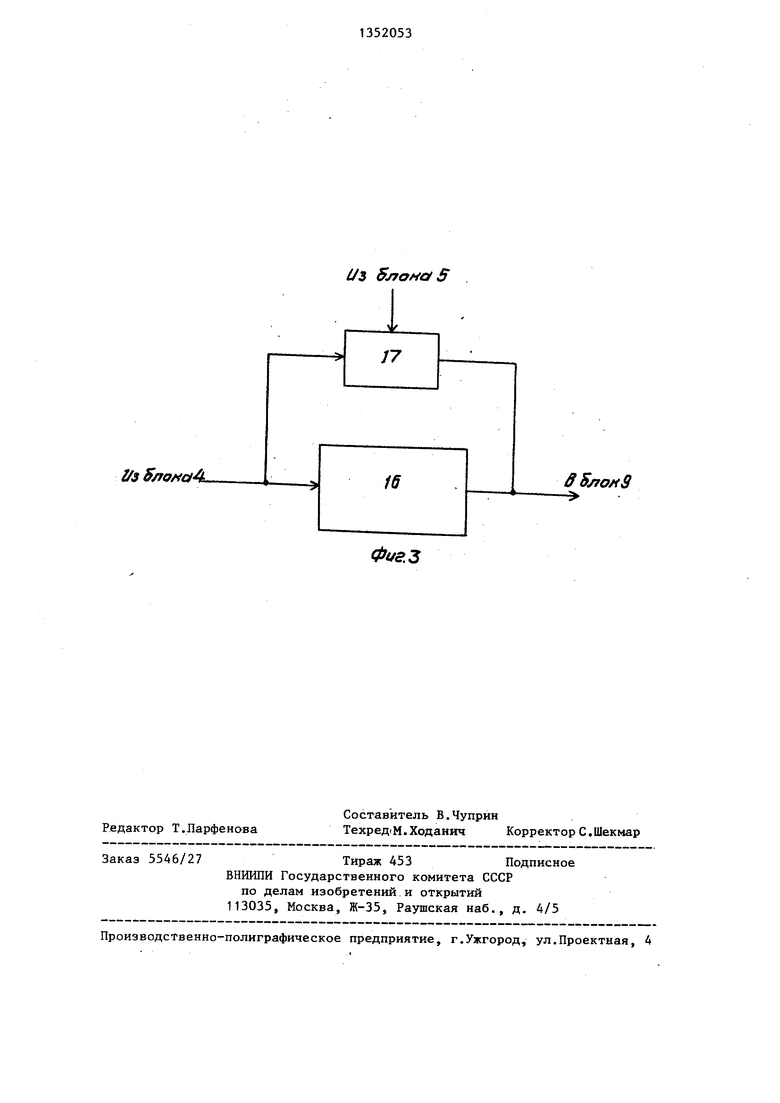
На фиг, 1 изображена функциональная схема системы управления гидродомкратами горных машин , на фиг,2 - функциональная схема блока памяти на фиг; 3 - функциональная схема блока интегрирования.
Система управления гидродомкратами горных машин (фиг. 1) состоит из блока 1 памяти, связанного своими первым и вторым выходами с электрическими входами гидрораспределителя 2, ко- , торый соединен гидромагистралями с поршневой и штоковой полостями гидродомкрата 3, причем сливная гидромагистраль гидрораспределителя 2 соединена с входом датчика 4 расхода, электрический выход которого соединен с входом первого порогового блока 3 , с информационным входом блока 6 интегрирования и входом блока 7 усреднения, кроме того выход первого .порогового блока 5 соединен с управляющим входом блока интегрирования 6. Выход блока 7 усреднения соединен с входом масштабного усилителя 8, выход которого и выход блока 6 интегрирования соединены с двумя входами блока 9 cy lмиposaния. Выход блока 9 суммирования соединен с информационным входом второго порогового
блока 10, управляющий вход которого соединен с третьим выходом блока 1
памяти. Выход второго порогового блока 10 соединен с входом блока 1 памяти. В состав блока 1 памяти (фиг.2) входят дешифратор 11, выходтз которого соединены с входом регистра 12 и входами триггеров 14 и 15. Выходы триггеров 14 и 15 являются соответственно первым и вторым выходами блока
. 1 памяти и поступают на входы блока 2. Выход регистра 12 соединен с входом цифро-аналогового преобразователя (ЦАП) 13, выход которого является третьим выходом блока 1 памяти и соединен с управляющим входом блока 10. Вторые входы регистра 12 и триггеров 14 и 15 являются вторым входом блока 1 памяти и соединены с
5
0
5
0
Б
0
5
0
5
выходом второго порогового блока 10 (фиг, 1). Блок 6 интегрирования (фиг. 3) состоит из собственного интегратора 16 и ключа 17, информационный вход и выход последнего соединены с входом и выходом интегратора 16, а управляющий вход ключа 17 соединен с выходом первого порогового блока 5 (фиг. 1).
Система работает следующим образом.
На первый вход блока 1 памяти приходит сигнал, например от управляющей вычислительной машины (УВМ), несущий информацию о том, в какую сторону и на какую величину должен переместиться шток гидродомкрата 3. Сигнал приходит на дешифратор 11 (фиг. 2). Пусть, например, первые 8 бит сигнала несут информацию о том, на какую величину должен переместиться шток гидродомкрата. Эта часть информации попадает через дешифратор на регистр 12, затем на ЦАП 13, где преобразуется из кода в аналоговую величину уставки для настройки порога второго порогового блока 10 системы. Последние 2 бита информации из УВМ однозначно определяют, в какую сторону должно произойти перемещение штока гидродомкрата 3 (фиг.1). Эти два бита попадают на триггеры 14 и 15. .Один из них включается и управляет гидрораспределителем 2 (фиг, 1). После включения гидрораспределителя 2 он коммутирует гидро- магистраши гидродомкрата 3 с напорной и сливной магистралями гидросистемы. Гидродомкрат перемещается, и в гидросистеме происходит расход рабочей жидкости. На электрическом выходе датчика 4 расхода, установленного в сливной магистрали гидрораспределителя, появляется сигнал, который попадает на первый пороговый блок 5, настроенный на небольшую уставку.
Назначение первого порогового бло ка 5 следующее. На выходе датчика 4 расхода даже в состоянии покоя системы могут происходить небольшие колебания сигнала, это может быть связано с нестабильностями электронной схемы датчика. Для того, чтрбы эти помехи не воспринимались блоком 6 интегрирования как полезный сигнал и используется пороговый блок 5. При превьщ1ении сигналом с датчика 4 расхода уставки, на которую нас -роен пороговый блок 5 (возможны колебания сигнала датчика 4), на управляющий вход блока 6 интегрирования и управляющий вход ключа 17 (фиг. 3) приходит разрешающий сигнал с выхода порогового блока 5, На информационньш вход блока 6 интегрирования и вход интегратора 16 (фиг, 3) приходит сигнал с датчика 4 расхода рабочей жидкости. В блоке 6 интегрирования после поступления разрешающего сигнала ключ 17 размыкается, и в интеграторе 16 происходит интегрирование сигнала датчика 4, несущего информацию о расходе рабочей жидкости в сливной магистрали .гидрораспределителя. На выходе блока 6 интегрирования появля- ется сигнал, соответствующий объему вытесненной из гидродомкрата рабочей жидкости. Сигнал с датчика 4 расхода попадает также на вход блока 7 усреднения . Здесь происходит скользящее усреднение сигнала датчика 4 расхода. Время скользящего усреднения, на которое настроен блок 7, равно времени запаздывания гидрораспределителя 2 при отключении. Сигнал на выходе блока 7 усреднения соответствует скользящему среднему значению расхода за время отключения гидрораспределителя. Этот сигнал попадает на масштабный усилитель 8. Коэффициент передачи масштабного усилителя равен времени запаздывания гидрораспределителя 2 при отключении.
На выходе масштабного усилителя 8 таким образом появляется сигнал, по величине пропорциональный прогнозируемому объему вытесненной из гидродомкрата рабочей жидкости за ближайщий .интервал времени, равный запаздыванию гидрораспределителя при отключении. Эта величина попадает на один из входов блока 9 суммирования, на второй вход которого приходит сигнал с блока 6 интегрирования. Таким образом, в блоке 9 суммирования происходит сложение значения объема вытесненной из гидродомкрата жидкости и прогнозируемого объема, который будет вытеснен после получения команды на отключение за счет запаздывания гидрораспределителя. Полученная сумма сравнивается во втором пороговом блоке 10 с величиной уставки.
2053
поступившей из блока 1 памяти. Как только эти величины сравниваются, пороговьш блок 10 дает сигнал, который попадает в блок 1 памяти, обнуляет содержимое регистра 12 (фиг.2) и переводит триггеры 14 и 15 в ис-., ходное состояние. После этого на вход гидрораспределителя поступает сигнал о прекращении перемещения и система переходит в исходное состояние.
10
Предлагаемая система может быть использована для управления любым количеством гидродомкратов. Для этого увеличивается количество триггеров в блоке памяти и количество используемых гидрораспределителей. Все сливные магистрали гидрораспределителей при этом соединяются вместе, и в общую сливную магистраль устанавливается датчик 4. Остальные блоки системы остаются без изменения.
Формула изобретения
1.Способ управления гидродомкратами .горных машин, заключающийся в задании объема рабочей жидкости, которую необходимо закачать в гидродомкрат, подачи рабочей жидкости в соответствующую полость гидродомкрата, измерении расхода рабочей жидкости и непрерывном определении объема рабочей жидкости, закачиваемой в гидродомкрат, отличающийся тем, что, с целью повышения точности управления путем компенсации нестабильности действующего на шток гидродомкрата усилия, задают время запаздывания &с гидрораспределителя при его отключении, в каждый момент времени определяют объем рабочей жидкости, который будет закачен в гидродомкрат за данное время запаздывания &t при отключении гидрораспределителя в момент времени t.j , суммируют его с объемом, закаченным в гидродомкрат до момента времени с-, сравнивают полученную сумму с заданным объемом и при их равенстве прекращают подачу рабочей жидкости в гидродомкрат.
2. Способ по п. 1, о т л и ч а- ю щ и и с я тем, что измеряют расход рабочей жидкости в сливкой магистрали гидрораспределителя.
1
fi
10
8
cpus.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления гидродомкратами горных машин | 1986 |
|
SU1432216A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2005 |
|
RU2281244C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| Устройство управления режимами работы выемочного агрегата для пластов крутого падения | 1986 |
|
SU1320411A2 |
| Установка для бурения шпуров | 1986 |
|
SU1435774A1 |
| Устройство управления режимами работы выемочного агрегата | 1983 |
|
SU1137200A1 |
| Устройство для определения транспортного запаздывания | 1982 |
|
SU1111130A1 |
| Устройство управления режимами работы выемочного агрегата | 1985 |
|
SU1240893A2 |
| Устройство контроля состояния гидросистемы шахтной крепи | 1979 |
|
SU781366A1 |
| Устройство для управления стреловидным исполнительным органом проходческого комбайна | 1988 |
|
SU1602987A1 |
Изобретение относится к автоматическому управлению горными машина ш и позволяет повысить точность управления путем компенсации нестабильности усилия, действующего на шток гидродомкрата (ГД) усилия. Задают объем рабочей жидкости (РЖ), которую необх одимо закачать в ГД для его перемещения на заданную величину, и время запаздывания дс гидрораспределителя (ГР) при его отключении. При подаче РЖ в соответствующую полость ГД в сливной магистрали ГР измеряют расход РЖ и непрерывно определяют объем РЖ. В каждый момент времени с. определяют также объем РЖ, которьй будет закачен в ГД за время лс при отключении ГР в момент времени t; . Затем суммируют зтот объем РЖ с объемом-РЖ, закаченным в ГД до момента времени t-. Суммарный объем РЖ сравнивают с заданном и при их равенстве прекращают подачу РЖ в ГД. 1 з.п. ф-лы, 3 ил. i (Л
вУлонГО ZXf - cwo /
Фи&. 2
//3 SjyoHct S
г/3 s/ro/ ci
Редактор Т.Ларфенова
Составитель В.Чуприн
Техред|М.Ходанич Корректор С.Шекмар
Заказ 5546/27
Тираж 453Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
16
ff S/ro/fS -
.З
| Трлпезников Л.И | |||
| Автоматическое управление процессами шахт и рудников | |||
| М.: Недра, 1985, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Литовский З.Л | |||
| О структуре электрогидравлического регулятора перемещения режущих органов горной машины | |||
| .Рукопись ДЕП в ЦНИЭИуголь, № 3390, М.: ЛГИ, 1985. | |||
